
പാഠം 2: വൈദ്യുതകാന്തിക ഉപയോഗം
പദ്ധതി നിർമ്മിക്കുന്നു
-
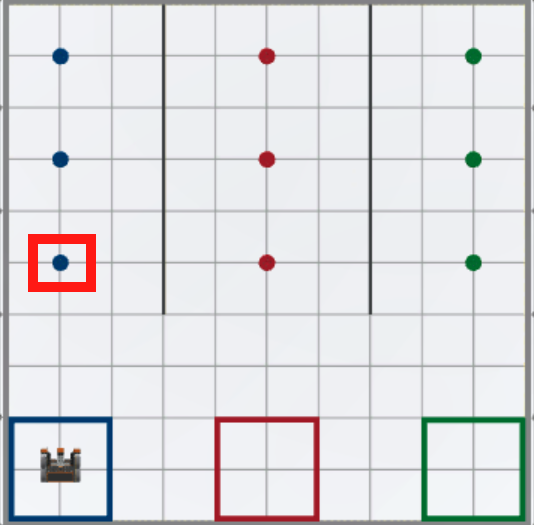
ഡിസ്ക് മൂവർ പ്ലേഗ്രൗണ്ടിലെ VR റോബോട്ടിന്റെ ആരംഭ പോയിന്റിൽ നിന്ന് 750 മില്ലിമീറ്റർ (mm) അകലെയാണ് ആദ്യത്തെ നീല ഡിസ്ക്. ആദ്യ കമന്റിന് താഴെയുള്ള drive_for കമാൻഡ് വലിച്ചിട്ട് 750 മില്ലിമീറ്റർ (mm) മുന്നോട്ട് ഡ്രൈവ് ചെയ്യുന്നതിന് പാരാമീറ്ററുകൾ സജ്ജമാക്കുക, അങ്ങനെ നിങ്ങളുടെ പ്രോജക്റ്റ് ഇതുപോലെ കാണപ്പെടും:
ഡെഫ് മെയിൻ(): # 1. ആദ്യത്തെ നീല ഡിസ്ക് ഡ്രൈവ്ട്രെയിനിലേക്ക് ഡ്രൈവ് ചെയ്യുക.drive_for(FORWARD, 750, MM) # 2. ആദ്യത്തെ നീല ഡിസ്ക് # 3 എടുക്കുക. നീല ഗോൾ # 4 ലേക്ക് റിവേഴ്സ് ഡ്രൈവ് ചെയ്യുക. നീല ഗോളിൽ നീല ഡിസ്ക് ഇടുക.
നിങ്ങളുടെ അറിവിലേക്കായി
ഓരോ ഗ്രിഡ് സ്ക്വയറിന്റെയും അളവുകൾ ഉപയോഗിച്ച് VR റോബോട്ടിന്റെ ആരംഭ പോയിന്റും ആദ്യത്തെ നീല ഡിസ്കും തമ്മിലുള്ള ദൂരം കണക്കാക്കി. ഡിസ്ക് മൂവർ പ്ലേഗ്രൗണ്ട് ലെ ഓരോ ഗ്രിഡ് സ്ക്വയറും 200 മില്ലിമീറ്റർ (മില്ലീമീറ്റർ) 200 മില്ലിമീറ്റർ (മില്ലീമീറ്റർ) ആണ്.
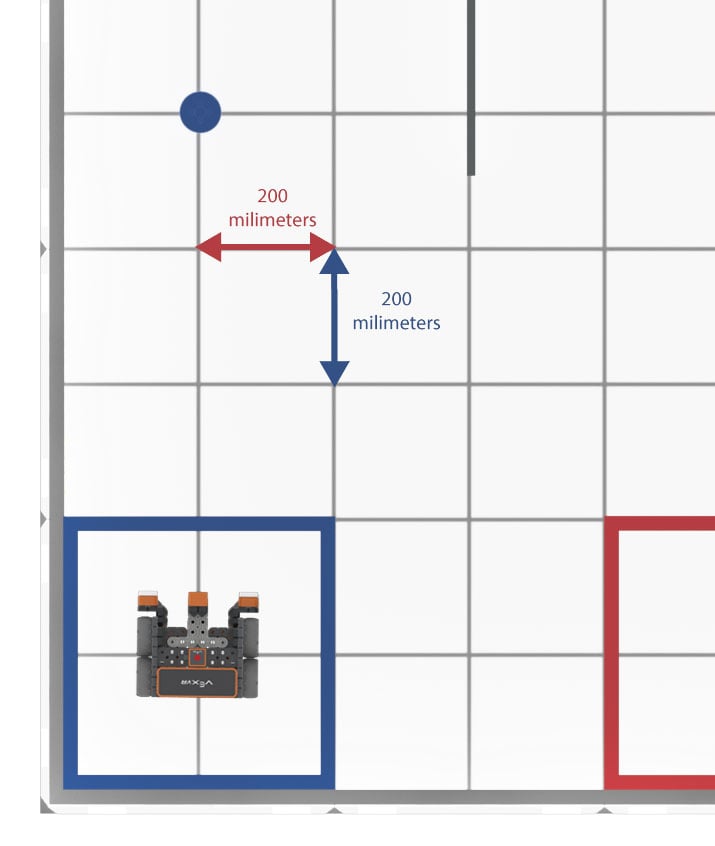
ഈ വിവരങ്ങൾ ഉപയോഗിച്ച്, ആദ്യത്തെ നീല ഡിസ്ക് VR റോബോട്ടിന്റെ നിന്ന് 800 മില്ലിമീറ്റർ (മില്ലീമീറ്റർ) അകലെയാണെന്ന് കണക്കാക്കാം. VR റോബോട്ടിന്റെ മുൻവശത്താണ് ഇലക്ട്രോമാഗ്നറ്റ് ഉള്ളതിനാൽ, ഇലക്ട്രോമാഗ്നറ്റും ആദ്യത്തെ നീല ഡിസ്കും തമ്മിലുള്ള ദൂരം 800 മില്ലിമീറ്ററിനേക്കാൾ (mm) അല്പം കുറവായിരിക്കാം.
-
VR റോബോട്ട് ആദ്യത്തെ നീല ഡിസ്കിൽ എത്തിക്കഴിഞ്ഞാൽ, VR റോബോട്ട് energizeകമാൻഡ് ഉപയോഗിച്ച് ഇലക്ട്രോമാഗ്നറ്റിനെ ബൂസ്റ്റ് ചെയ്യണം. രണ്ടാമത്തെ കമന്റിന് താഴെയായി energize കമാൻഡ് വലിച്ചിടുക അല്ലെങ്കിൽ ടൈപ്പ് ചെയ്യുക, അങ്ങനെ പ്രോജക്റ്റിന്റെ ആ ഭാഗം ഇതുപോലെ കാണപ്പെടും:
# 2. ആദ്യത്തെ നീല ഡിസ്ക് മാഗ്നെറ്റ് എടുക്കുക. ഊർജ്ജസ്വലമാക്കുക(ബൂസ്റ്റ്) -
അടുത്തതായി, VR റോബോട്ട് നീല ഡിസ്ക് ഉപയോഗിച്ച് ആരംഭ സ്ഥാനത്തേക്ക് പിന്നിലേക്ക് ഡ്രൈവ് ചെയ്യും. മൂന്നാമത്തെ കമന്റിന് താഴെയായി drive_forകമാൻഡ് വലിച്ചിടുക അല്ലെങ്കിൽ ടൈപ്പ് ചെയ്യുക, അങ്ങനെ പ്രോജക്റ്റിന്റെ ആ ഭാഗം ഇതുപോലെ കാണപ്പെടും. 750 മില്ലിമീറ്റർ (മില്ലീമീറ്റർ) റിവേഴ്സ് ചെയ്യാൻdrive_forകമാൻഡ് പാരാമീറ്ററുകൾ സജ്ജമാക്കുക.
# 3. നീല ഗോൾ ഡ്രൈവ്ട്രെയിനിലേക്ക് റിവേഴ്സ് ഡ്രൈവ് ചെയ്യുക.drive_for(REVERSE, 750, MM) -
നീല ഗോളിനുള്ളിൽ പ്രവേശിച്ചുകഴിഞ്ഞാൽ, വിആർ റോബോട്ട് നീല ഡിസ്ക് വിടേണ്ടിവരും. നാലാമത്തെ കമന്റിന് താഴെയായി energize കമാൻഡ് ഡ്രാഗ് ചെയ്യുകയോ ടൈപ്പ് ചെയ്യുകയോ ചെയ്യുക, തുടർന്ന് പാരാമീറ്റർ 'DROP' ആയി സജ്ജമാക്കുക, അങ്ങനെ പ്രോജക്റ്റിന്റെ ആ ഭാഗം ഇതുപോലെ കാണപ്പെടും:
# 4. നീല ഗോൾ മാഗ്നെറ്റിൽ നീല ഡിസ്ക് ഇടുക. ഊർജ്ജസ്വലമാക്കുക(ഡ്രോപ്പ് ചെയ്യുക) -
പ്ലേഗ്രൗണ്ട് വിൻഡോ തുറന്നിട്ടില്ലെങ്കിൽ അത് തുറക്കുക. ഡിസ്ക് മൂവർ പ്ലേഗ്രൗണ്ട് തുറക്കുന്നുണ്ടെന്ന് ഉറപ്പാക്കുക, തുടർന്ന് പ്രോജക്റ്റ് പ്രവർത്തിപ്പിക്കുക.
-
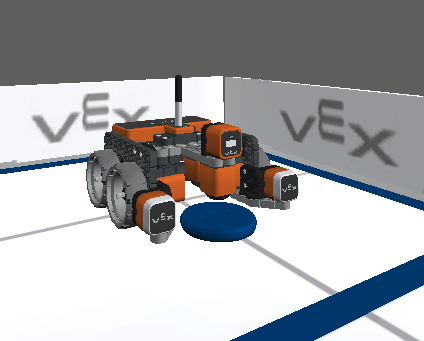
ഇലക്ട്രോമാഗ്നറ്റിനെ ഊർജ്ജസ്വലമാക്കി വിആർ റോബോട്ട് ആദ്യത്തെ നീല ഡിസ്ക് എടുക്കുന്നു, തുടർന്ന് നീല ലക്ഷ്യത്തിലേക്ക് റിവേഴ്സ് ഡ്രൈവ് ചെയ്ത് നീല ഡിസ്ക് താഴെയിടുന്നു.
ഈ പാഠത്തിന്റെ ബാക്കി ഭാഗം തുടരാൻ അടുത്തത് ബട്ടൺ തിരഞ്ഞെടുക്കുക.