
पाठ 2: विद्युत चुम्बक का उपयोग
परियोजना का निर्माण
-
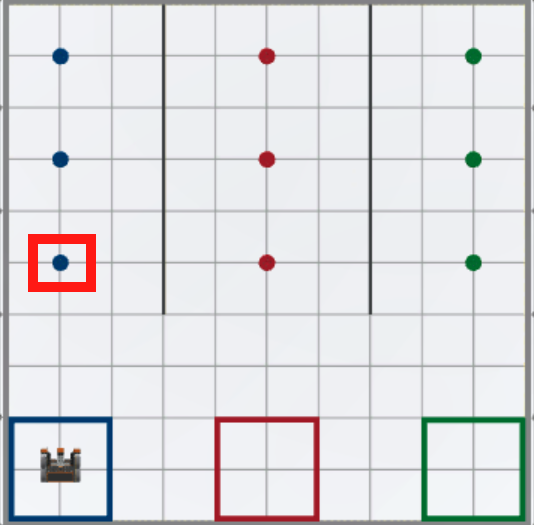
पहली नीली डिस्क, मूवर प्लेग्राउंड पर VR रोबोट के शुरुआती बिंदु से 750 मिलीमीटर (मिमी) दूर है। पहली टिप्पणी के नीचे drive_for कमांड खींचें और पैरामीटर्स को 750 मिलीमीटर (मिमी) आगे ड्राइव करने के लिए सेट करें, ताकि आपका प्रोजेक्ट इस तरह दिखे:
def मुख्य(): # 1. पहली नीली डिस्क पर ड्राइव करें drivetrain.drive_for(FORWARD, 750, MM) # 2. पहली नीली डिस्क # 3 उठाओ। नीले गोल # 4 की ओर रिवर्स में ड्राइव करें। नीली डिस्क को नीले गोल में गिराएँ
आपकी जानकारी के लिए
वी.आर. रोबोट के प्रारंभिक बिंदु और पहली नीली डिस्क के बीच की दूरी का अनुमान प्रत्येक ग्रिड वर्ग के आयामों का उपयोग करके लगाया गया था। डिस्क मूवर प्लेग्राउंड पर प्रत्येक ग्रिड वर्ग 200 मिलीमीटर (मिमी) x 200 मिलीमीटर (मिमी) है।
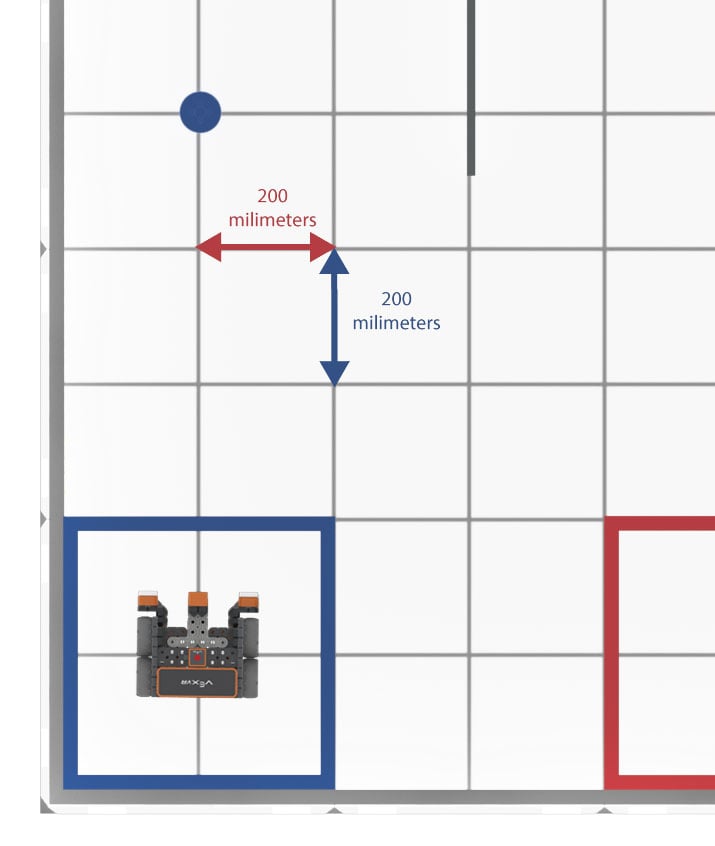
इस जानकारी का उपयोग करके, यह अनुमान लगाया जा सकता है कि पहली नीली डिस्क वीआर रोबोट के केंद्र से 800 मिलीमीटर (मिमी) दूर है। चूंकि इलेक्ट्रोमैग्नेट वीआर रोबोट के सामने की ओर है, इसलिए इलेक्ट्रोमैग्नेट और पहली नीली डिस्क के बीच की दूरी 800 मिलीमीटर (मिमी) से थोड़ी कम हो सकती है।
-
एक बार जब वीआर रोबोट पहली नीली डिस्क तक पहुंच जाता है, तो वीआर रोबोट को एनर्जाइज़कमांड का उपयोग करके इलेक्ट्रोमैग्नेट को बढ़ावा देना चाहिए। energize कमांड को दूसरी टिप्पणी के नीचे खींचें या टाइप करें, ताकि प्रोजेक्ट का वह भाग इस तरह दिखे:
# 2. पहली नीली डिस्क magnet.energize(BOOST) उठाएँ -
इसके बाद, वीआर रोबोट नीली डिस्क के साथ प्रारंभिक बिंदु पर वापस उल्टी दिशा में चला जाएगा। तीसरी टिप्पणी के नीचे drive_forकमांड खींचें या टाइप करें, ताकि परियोजना का वह भाग इस तरह दिखे। drive_forकमांड पैरामीटर को 750 मिलीमीटर (मिमी) रिवर्स पर सेट करें।
# 3. नीले लक्ष्य की ओर रिवर्स में ड्राइव करें drivetrain.drive_for(REVERSE, 750, MM) -
एक बार नीले गोल के अंदर पहुंचने पर, वीआर रोबोट को नीली डिस्क को छोड़ना होगा। चौथी टिप्पणी के नीचे energize कमांड खींचें या टाइप करें, और पैरामीटर को 'DROP' पर सेट करें, ताकि परियोजना का वह भाग इस तरह दिखे:
# 4. नीली डिस्क को नीले गोल magnet.energize(DROP) में गिराएं -
यदि प्लेग्राउंड विंडो पहले से खुली नहीं है तो उसे खोलें। सुनिश्चित करें किडिस्क मूवर प्लेग्राउंड खुलता है, और प्रोजेक्ट को चलाएं।
-
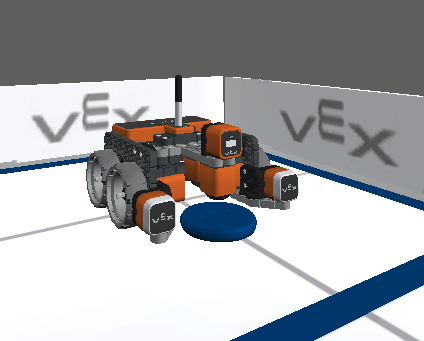
वी.आर. रोबोट इलेक्ट्रोमैग्नेट को सक्रिय करके पहली नीली डिस्क उठाता है, फिर नीले लक्ष्य की ओर पीछे की ओर जाता है और नीली डिस्क को गिरा देता है।
इस पाठ के शेष भाग को जारी रखने के लिए अगला बटन का चयन करें।