
পাঠ ২: তড়িৎচুম্বক ব্যবহার
প্রকল্পটি নির্মাণ
-
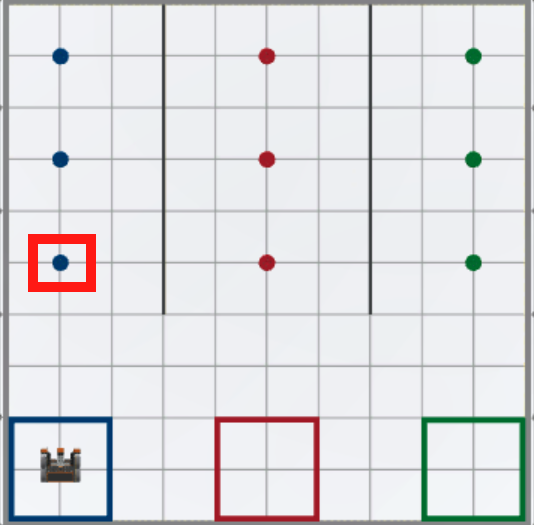
ডিস্ক মুভার প্লেগ্রাউন্ডে VR রোবটের শুরুর বিন্দু থেকে প্রথম নীল ডিস্কটি 750 মিলিমিটার (মিমি) দূরে। প্রথম মন্তব্যের নীচে একটি drive_for কমান্ড টেনে আনুন এবং 750 মিলিমিটার (মিমি) এগিয়ে যাওয়ার জন্য প্যারামিটার সেট করুন, যাতে আপনার প্রকল্পটি এইরকম দেখায়:
ডিফল্ট মেইন(): # ১। প্রথম নীল ডিস্ক drivetrain.drive_for(FORWARD, 750, MM) # 2 তে গাড়ি চালান। প্রথম নীল ডিস্ক # ৩ তুলে নাও। নীল গোল #৪ এর বিপরীত দিকে গাড়ি চালান। নীল গোলের মধ্যে নীল ডিস্কটি ফেলে দাও।
আপনার তথ্যের জন্য
ভিআর রোবটের সূচনা বিন্দু এবং প্রথম নীল ডিস্কের মধ্যে দূরত্ব প্রতিটি গ্রিড বর্গক্ষেত্রের মাত্রা ব্যবহার করে অনুমান করা হয়েছিল। ডিস্ক মুভার প্লেগ্রাউন্ড এর প্রতিটি গ্রিড বর্গ হল 200 মিলিমিটার (মিমি) বাই 200 মিলিমিটার (মিমি)।
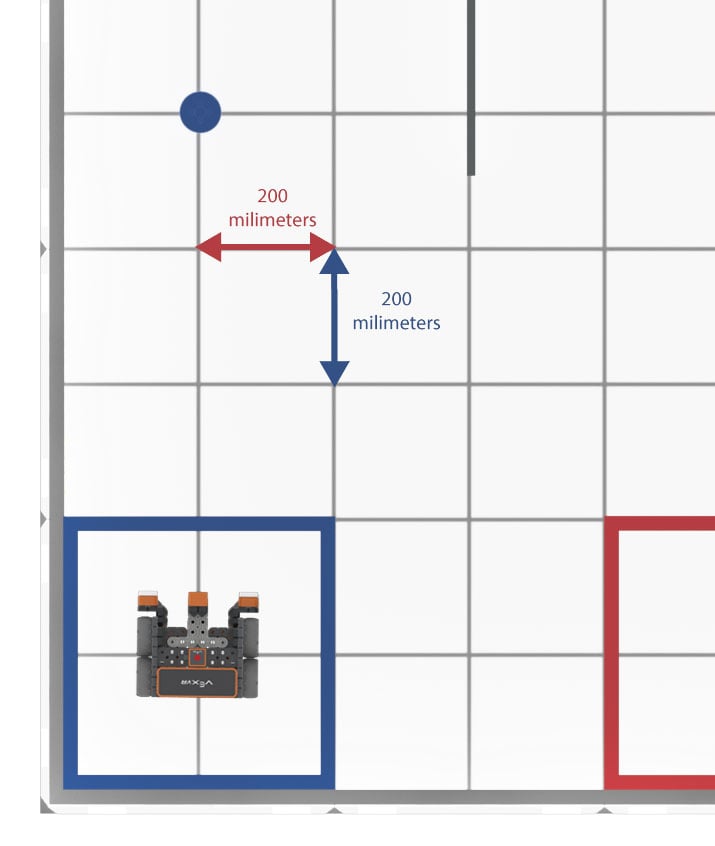
এই তথ্য ব্যবহার করে, এটি অনুমান করা যেতে পারে যে প্রথম নীল ডিস্কটি VR রোবটের কেন্দ্র থেকে 800 মিলিমিটার (মিমি)। যেহেতু ইলেক্ট্রোম্যাগনেট VR রোবটের সামনে থাকে, তাই ইলেক্ট্রোম্যাগনেট এবং প্রথম নীল ডিস্কের মধ্যে দূরত্ব 800 মিলিমিটার (মিমি) থেকে সামান্য কম হতে পারে।
-
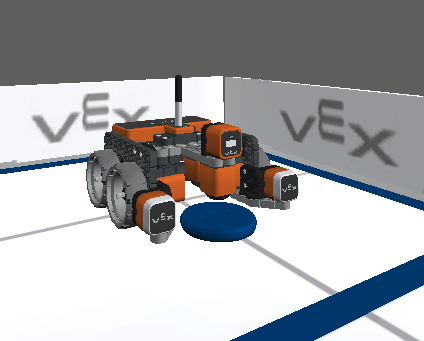
একবার VR রোবটটি প্রথম নীল ডিস্কে পৌঁছালে, VR রোবটকে energizeকমান্ড ব্যবহার করে ইলেক্ট্রোম্যাগনেটকে বুস্ট করতে হবে। দ্বিতীয় মন্তব্যের নীচে energize কমান্ডটি টেনে আনুন অথবা টাইপ করুন, যাতে প্রকল্পের সেই অংশটি এইরকম দেখায়:
# 2। প্রথম নীল ডিস্ক magnet.energize(BOOST) তুলে নাও। -
এরপর, ভিআর রোবটটি নীল ডিস্কটি ব্যবহার করে উল্টো দিকে গাড়ি চালিয়ে শুরুর বিন্দুতে ফিরে যাবে। তৃতীয় মন্তব্যের নিচে drive_forকমান্ডটি টেনে আনুন অথবা টাইপ করুন, যাতে প্রকল্পের সেই অংশটি এরকম দেখায়। drive_forকমান্ড প্যারামিটারগুলিকে 750 মিলিমিটার (মিমি) বিপরীতে সেট করুন।
# 3। নীল লক্ষ্য এর বিপরীত দিকে ড্রাইভ করুন drivetrain.drive_for(REVERSE, 750, MM) -
নীল গোলের ভেতরে প্রবেশ করার পর, ভিআর রোবটকে নীল ডিস্কটি ছেড়ে দিতে হবে। চতুর্থ মন্তব্যের নিচে একটি energize কমান্ড টেনে আনুন অথবা টাইপ করুন, এবং প্যারামিটারটি 'DROP' তে সেট করুন, যাতে প্রকল্পের সেই অংশটি এইরকম দেখায়:
# 4। নীল গোল magnet.energize(DROP) এর মধ্যে নীল ডিস্কটি ফেলে দিন। -
খেলার মাঠের জানালাটি যদি ইতিমধ্যে খোলা না থাকে তবে তা খুলুন। নিশ্চিত করুন যেডিস্ক মুভার প্লেগ্রাউন্ড খোলে, এবং প্রকল্পটি চালান।
-
ভিআর রোবটটি ইলেক্ট্রোম্যাগনেটকে শক্তি দিয়ে প্রথম নীল ডিস্কটি তুলে নেয়, তারপর বিপরীত দিকে নীল লক্ষ্যে ফিরে যায় এবং নীল ডিস্কটি ফেলে দেয়।
এই পাঠের বাকি অংশটি চালিয়ে যেতে পরবর্তী বোতামটি নির্বাচন করুন।