
Lección 2: Uso del electroimán
Construir el proyecto
-
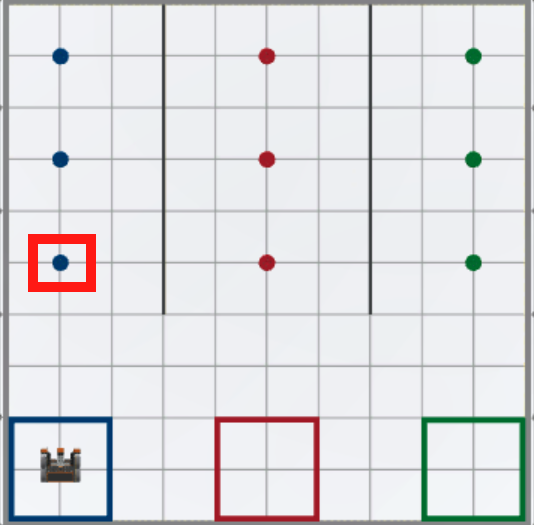
El primer disco azul está a 750 milímetros (mm) del punto de inicio del robot VR en el área de juegos Disk Mover. Arrastre un comando drive_for debajo del primer comentario y configure los parámetros para avanzar 750 milímetros (mm), de modo que su proyecto se vea así:
def main(): # 1. Conduzca hasta el primer tren motriz de discoazul.drive_for (ADELANTE, 750, MM) # 2. Recoge el primer disco azul # 3. Conduce en reversa hasta la meta azul n .º 4. Deja caer el disco azul en la portería azul
Para su información
La distancia entre el punto de partida del Robot VR y el primer disco azul se estimó utilizando las dimensiones de cada cuadrado de la cuadrícula. Cada cuadrado de cuadrícula en el Disk Mover Playground mide 200 milímetros (mm) por 200 milímetros (mm).
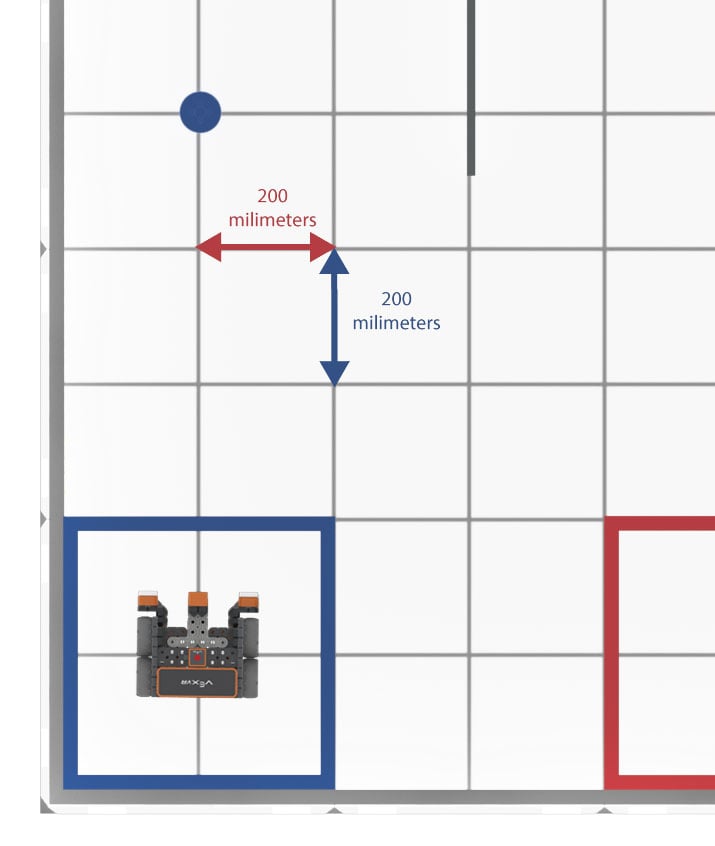
Con esta información, se puede estimar que el primer disco azul está a 800 milímetros (mm) del centro del robot VR. Dado que el electroimán está en la parte frontal del robot VR, la distancia entre el electroimán y el primer disco azul puede ser ligeramente más corta que los 800 milímetros (mm).
-
Una vez que el robot VR llega al primer disco azul, debe impulsar el electroimán usando el comando energizar . Arrastre o escriba el comando energizar debajo del segundo comentario, para que la sección del proyecto se vea así:
# 2. Recoge el primer disco azul magnet.energize(BOOST) -
A continuación, el robot VR retrocederá hasta el punto de partida con el disco azul. Arrastre o escriba un comando drive_for debajo del tercer comentario, para que la sección del proyecto se vea así. Establezca los parámetros del comando drive_for invertir 750 milímetros (mm).
# 3. Conduzca en reversa hacia la meta azul drivetrain.drive_for(REVERSA, 750, MM) -
Una vez dentro de la portería azul, el robot VR tendrá que liberar el disco azul. Arrastre o escriba un comando energizar debajo del cuarto comentario y configure el parámetro en 'DROP', para que la sección del proyecto se vea así:
# 4. Suelte el disco azul en la meta azul magnet.energize(DROP) -
Abra la ventana del patio de recreo si aún no está abierta. Asegúrese de que Disk Mover Playground se abra y ejecute el proyecto.
-
El robot VR recoge el primer disco azul energizando el electroimán, luego retrocede hasta la meta azul y deja caer el disco azul.
Seleccione el botón Siguiente para continuar con el resto de esta lección.