
Lição 2: Usando o Eletroímã
Construção do Projecto
-
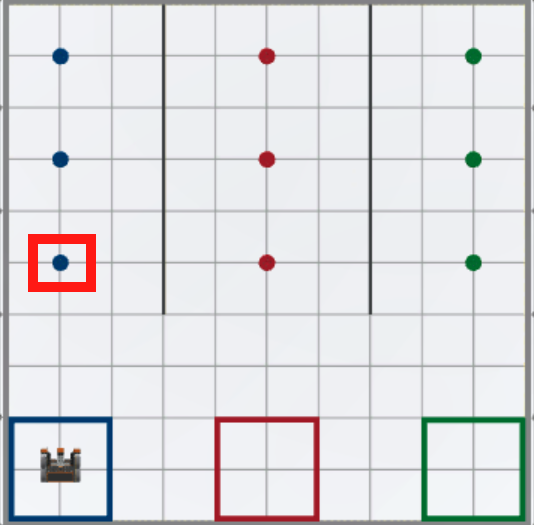
O primeiro disco azul está a 750 milímetros (mm) de distância do ponto de partida do VR Robot no Disk Mover Playground. Arraste um comando drive_for para baixo do primeiro comentário e defina os parâmetros para avançar 750 milímetros (mm), de modo a que o seu projeto fique assim:
def main(): # 1. Dirija para o primeiro disco azul drivetrain.drive_for(FORWARD, 750, MM) # 2. Pegue o primeiro disco azul # 3. Dirija em sentido inverso para a meta azul # 4. Solte o disco azul na meta azul
Para sua informação
A distância entre o ponto inicial do Robô VR e o primeiro disco azul foi estimada usando as dimensões de cada quadrado da grade. Cada quadrado da grade no Playground Disk Mover tem 200 milímetros (mm) por 200 milímetros (mm).
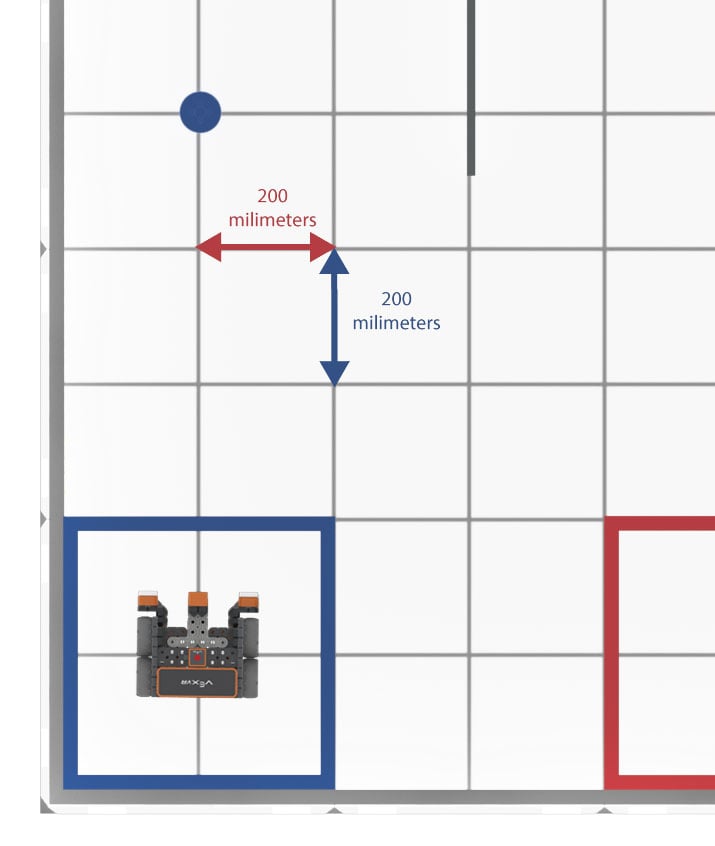
Usando essas informações, pode-se estimar que o primeiro disco azul está a 800 milímetros (mm) do centro do Robô VR. Como o Eletroímã está na frente do Robô VR, a distância entre o Eletroímã e o primeiro disco azul pode ser ligeiramente menor que os 800 milímetros (mm).
-
Assim que o Robot VR atingir o primeiro disco azul, o Robot VR deve impulsionar o Electroíman utilizando o comando energizar . Arraste ou digite o comando energize abaixo do segundo comentário, de modo a que a secção do projeto fique assim:
# 2. Pegue o primeiro disco azul magnet.energize(BOOST) -
Em seguida, o robô VR voltará ao ponto de partida com o disco azul. Arraste ou digite um comando drive_for abaixo do terceiro comentário, para que a secção do projeto fique assim. Defina os parâmetros drive_for command para reverter 750 milímetros (mm).
# 3. Conduza em marcha-atrás para a meta azul drivetrain.drive_for(MARCHA-ATRÁS, 750, MM) -
Uma vez dentro da meta azul, o robô VR precisará liberar o disco azul. Arraste ou digite um comando energize abaixo do quarto comentário e defina o parâmetro para 'DROP', para que a secção do projeto fique assim:
# 4. Solte o disco azul no ímã da baliza azul . Energize (SOLTE) -
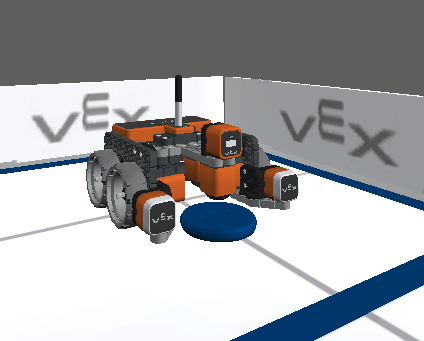
Abra a janela do playground se ainda não estiver aberta. Certifique-se de que o Disk Mover Playground seja aberto e execute o projeto.
-
O robô VR pega o primeiro disco azul energizando o eletroímã, em seguida, dirige em sentido inverso de volta para a meta azul e solta o disco azul.
Selecione o botão Seguinte para continuar com o resto desta lição.