
الدرس 2: استخدام الكهرومغناطيس
بناء المشروع
-
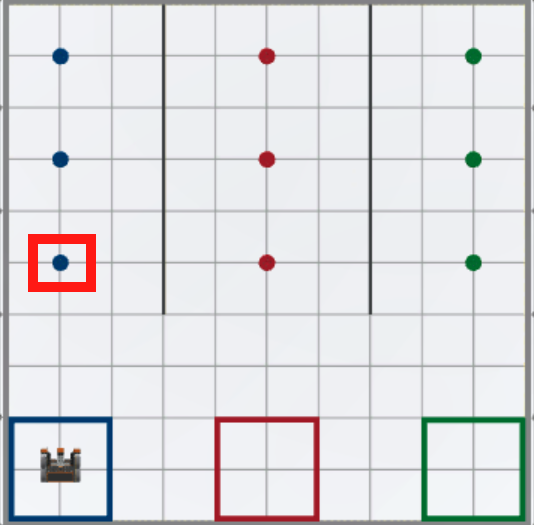
يقع القرص الأزرق الأول على بعد 750 ملليمتر (مم) من نقطة بداية روبوت الواقع الافتراضي في ملعب Disk Mover. اسحب DRIVE_FOR الأمر أسفل التعليق الأول واضبط المعلمات للمضي قدمًا 750 ملليمتر (مم)، بحيث يبدو مشروعك كما يلي:
def main (): # 1. قم بالقيادة إلى أول مجموعة أقراص زرقاءdrivetrain.drive_for (للأمام، 750، مم) # 2. التقط القرص الأزرق الأول رقم 3. القيادة في الاتجاه المعاكس للهدف الأزرق رقم 4. أسقط القرص الأزرق في المرمى الأزرق
لمعلوماتك
تم تقدير المسافة بين نقطة بداية روبوت الواقع الافتراضي والقرص الأزرق الأول باستخدام أبعاد كل مربع شبكة. يبلغ حجم كل مربع شبكي في ساحة اللعب Disk Mover 200 مليمتر (مم) في 200 مليمتر (مم).
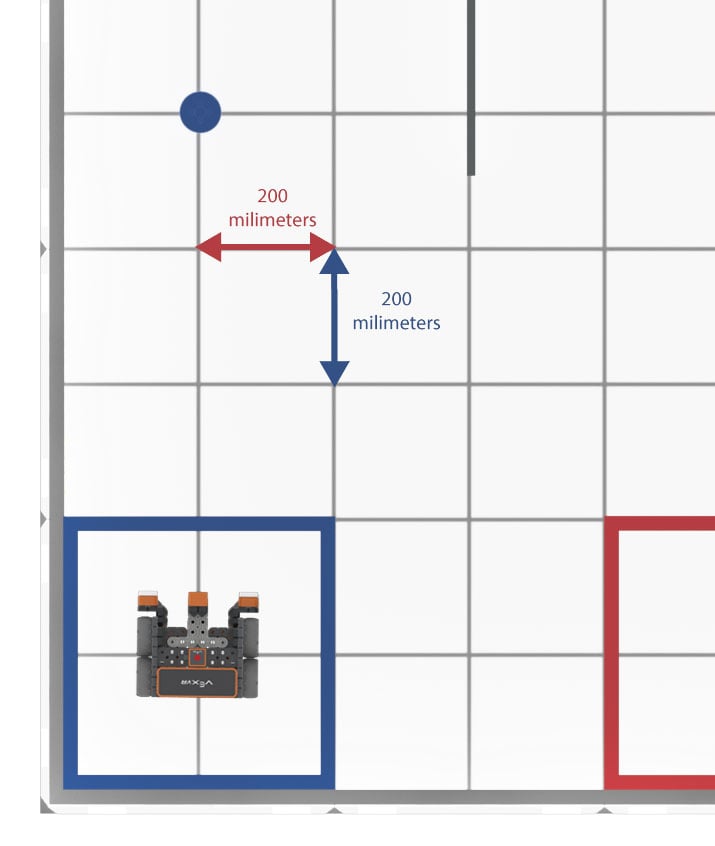
وباستخدام هذه المعلومات، يمكن تقدير أن القرص الأزرق الأول يقع على مسافة 800 مليمتر (مم) من المركز لروبوت الواقع الافتراضي. نظرًا لأن المغناطيس الكهربائي موجود في مقدمة روبوت الواقع الافتراضي، فقد تكون المسافة بين المغناطيس الكهربائي والقرص الأزرق الأول أقصر قليلاً من 800 ملليمتر (مم).
-
بمجرد وصول روبوت الواقع الافتراضي إلى القرص الأزرق الأول، يجب على روبوت الواقع الافتراضي تعزيز المغناطيس الكهربائي باستخدام الأمر تنشيط . اسحب أو اكتب الأمر energize أسفل التعليق الثاني، بحيث يبدو هذا القسم من المشروع كما يلي:
# 2. التقط أول مغناطيس قرص أزرق. قم بتنشيط(تعزيز) -
بعد ذلك، سيعود روبوت الواقع الافتراضي إلى نقطة البداية مع القرص الأزرق. اسحب أو اكتب drive_for الأمر أسفل التعليق الثالث، بحيث يبدو هذا القسم من المشروع هكذا. اضبط DRIVE_FOR معلمات الأمر لعكس 750 ملليمتر (مم).
# 3. القيادة في الاتجاه المعاكس للهدف الأزرق drivetrain.drive_for(عكس، 750، مم) -
بمجرد دخول الهدف الأزرق، سيحتاج روبوت الواقع الافتراضي إلى تحرير القرص الأزرق. اسحب أو اكتب الأمر energize أسفل التعليق الرابع، واضبط المعلمة على "DROP"، بحيث يبدو هذا القسم من المشروع كما يلي:
# 4. إسقاط القرص الأزرق في مغناطيس الهدف الأزرق. تنشيط(إسقاط) -
افتح نافذة الملعب إذا لم تكن مفتوحة بالفعل. تأكد من فتح Disk Mover Playground ، ثم قم بتشغيل المشروع.
-
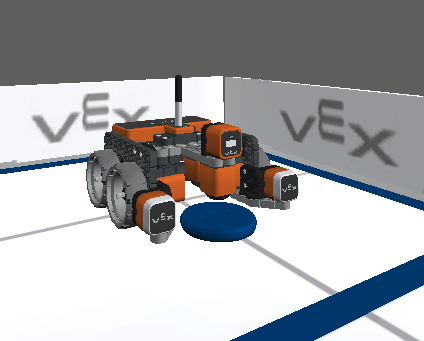
يلتقط روبوت الواقع الافتراضي أول قرص أزرق عن طريق تنشيط الكهرومغناطيس، ثم يقود في الاتجاه المعاكس إلى الهدف الأزرق ويسقط القرص الأزرق.
قم باختيار الزر التالي لمواصلة بقية هذا الدرس.