
Leçon 2 : Utilisation de l'électroaimant
Construire le projet
-
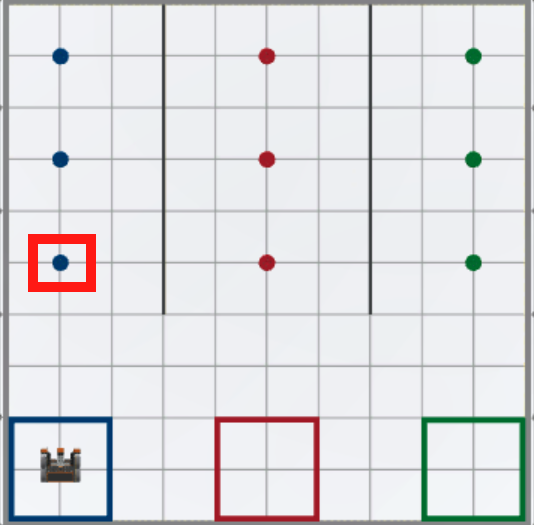
Le premier disque bleu est à 750 millimètres (mm) du point de départ du robot VR sur le terrain de jeu Disk Mover. Faites glisser une commande drive_for sous le premier commentaire et définissez les paramètres pour avancer de 750 millimètres (mm), de sorte que votre projet ressemble à ceci :
def main() : # 1. Drive to the first blue disk drivetrain.drive_for(FORWARD, 750, MM) # 2. Prenez le premier disque bleu n ° 3. Conduisez en marche arrière vers l'objectif bleu n ° 4. Déposez le disque bleu dans l'objectif bleu
Pour votre information
La distance entre le point de départ du Robot VR et le premier disque bleu a été estimée en utilisant les dimensions de chaque carré de grille. Chaque carré de grille sur le Disk Mover Playground est de 200 millimètres (mm) par 200 millimètres (mm).
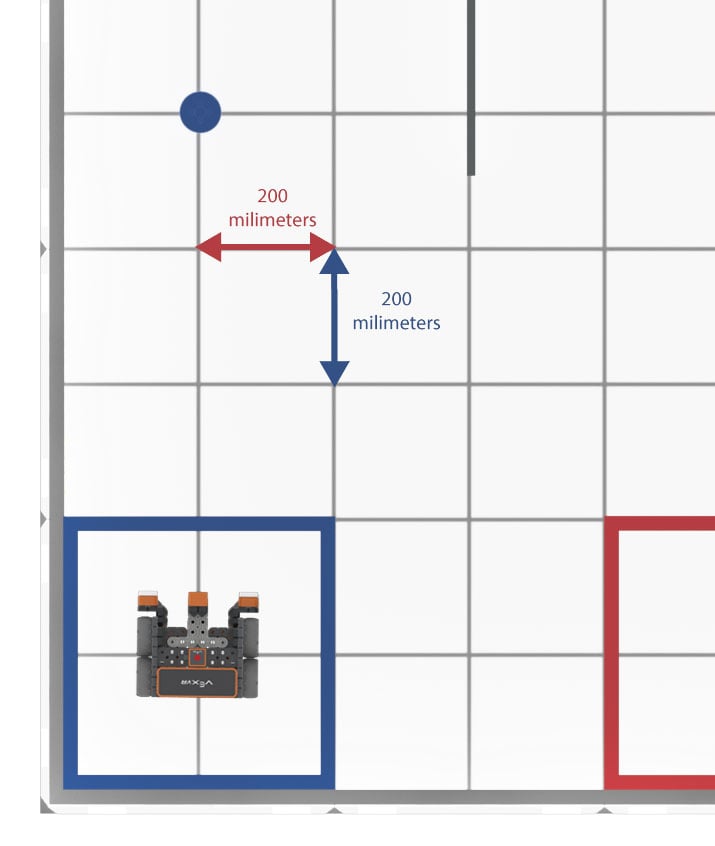
En utilisant ces informations, on peut estimer que le premier disque bleu est à 800 millimètres (mm) du centre du robot VR. Étant donné que l'électroaimant se trouve à l'avant du robot VR, la distance entre l'électroaimant et le premier disque bleu peut être légèrement inférieure aux 800 millimètres (mm).
-
Une fois que le robot VR atteint le premier disque bleu, le robot VR doit stimuler l'électro-aimant à l'aide de la commande dynamiser . Faites glisser ou tapez la commande energize sous le deuxième commentaire, de sorte que cette section du projet ressemble à ceci :
# 2. Prenez le premier disque bleu magnet.energize(BOOST) -
Ensuite, le robot VR retournera en marche arrière au point de départ avec le disque bleu. Faites glisser ou tapez une commande drive_for sous le troisième commentaire, de sorte que cette section du projet ressemble à ceci. Réglez les paramètres de la commande drive_for inverser 750 millimètres (mm).
# 3. Conduisez en marche arrière vers l'objectif bleu drivetrain.drive_for(MARCHE ARRIÈRE, 750, MM) -
Une fois à l'intérieur de l'objectif bleu, le robot VR devra libérer le disque bleu. Faites glisser ou saisissez une commande energize sous le quatrième commentaire et définissez le paramètre sur « DROP », de sorte que cette section du projet ressemble à ceci :
# 4. Déposez le disque bleu dans le but bleu magnet.energize(DROP) -
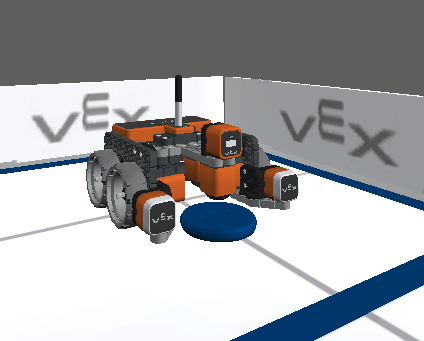
Ouvrez la fenêtre Playground si elle n'est pas déjà ouverte. Assurez-vous que le Disk Mover Playground s'ouvre et exécutez le projet.
-
Le robot VR prend le premier disque bleu en activant l'électro-aimant, puis retourne en marche arrière vers le but bleu et laisse tomber le disque bleu.
Sélectionnez le bouton Suivant pour continuer le reste de cette leçon.