
Lektion 2: Verwenden des Elektromagneten
Aufbau des Projekts
-
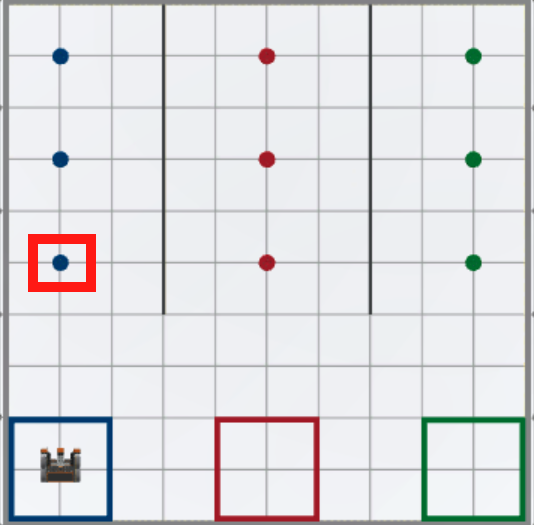
Die erste blaue Scheibe ist 750 Millimeter (mm) vom Startpunkt des VR-Roboters auf dem Disk Mover Playground entfernt. Ziehen Sie einen drive_for-Befehl unter den ersten Kommentar und legen Sie die Parameter so fest , dass sie 750 Millimeter (mm) vorwärts fahren, sodass Ihr Projekt wie folgt aussieht:
def main(): # 1. Fahren Sie zur ersten blauen Festplatte drivetrain.drive_for(FORWARD, 750, MM) # 2. Nimm die erste blaue Scheibe # 3. Fahren Sie rückwärts zum blauen Ziel # 4. Legen Sie die blaue Scheibe im blauen Ziel ab
Zur Kenntnisnahme
Der Abstand zwischen dem Startpunkt des VR-Roboters und der ersten blauen Scheibe wurde anhand der Abmessungen jedes Gitterquadrats geschätzt. Jedes Gitterquadrat auf dem Disk Mover Playground ist 200 Millimeter (mm) mal 200 Millimeter (mm) groß.
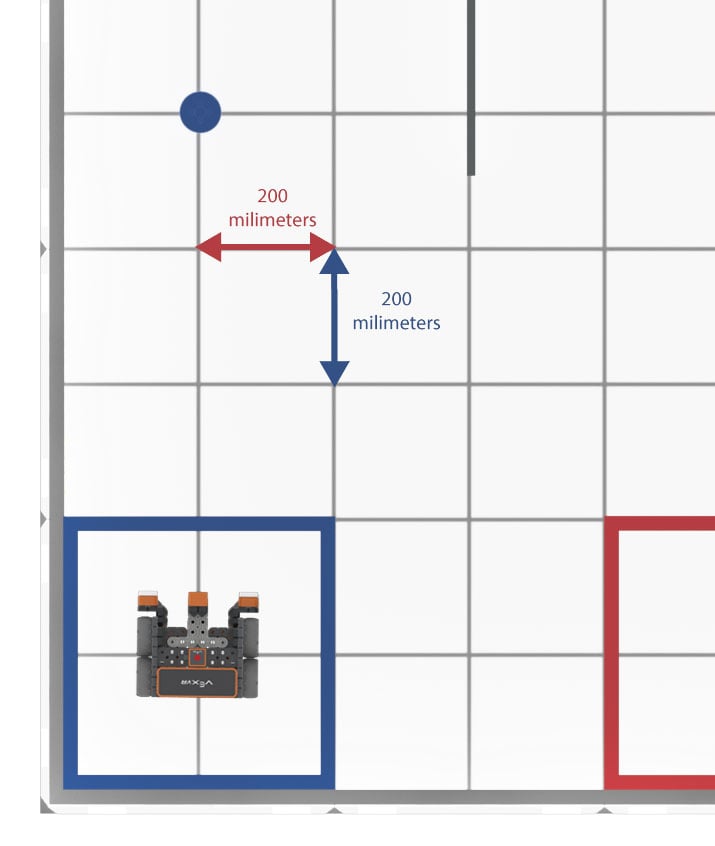
Anhand dieser Informationen kann geschätzt werden, dass die erste blaue Scheibe 800 Millimeter (mm) von der Mitte des VR-Roboters entfernt ist. Da sich der Elektromagnet an der Vorderseite des VR-Roboters befindet, kann der Abstand zwischen dem Elektromagneten und der ersten blauen Scheibe etwas kürzer als die 800 Millimeter (mm) sein.
-
Sobald der VR-Roboter die erste blaue Scheibe erreicht, muss er den Elektromagneten mit dem Befehl „ aktivieren verstärken. Ziehen oder tippen Sie den Befehl energize unter den zweiten Kommentar, sodass dieser Abschnitt des Projekts folgendermaßen aussieht:
# 2. Nehmen Sie den ersten blauen Scheibenmagneten auf . Erregen (BOOST) -
Als nächstes fährt der VR-Roboter rückwärts zurück zum Startpunkt mit der blauen Festplatte. Ziehen oder geben Sie einen drive_ for-Befehl unter den dritten Kommentar ein, damit der Abschnitt des Projekts wie folgt aussieht. Stellen Sie die Drive_for Befehlsparameter auf 750 Millimeter (mm) umkehren.
# 3. Fahren Sie rückwärts zum blauen Zielantrieb.drive_for (RÜCKWÄRTS, 750, MM) -
Sobald sich der VR-Roboter innerhalb des blauen Ziels befindet, muss er die blaue Festplatte freigeben. Ziehen oder geben Sie einen Energize-Befehl unter den vierten Kommentar ein und setzen Sie den Parameter auf "DROP", so dass der Abschnitt des Projekts wie folgt aussieht:
# 4. Legen Sie die blaue Scheibe in den blauen Tormagneten.energize(DROP) -
Öffnen Sie das Playground-Fenster , wenn es noch nicht geöffnet ist. Stellen Sie sicher, dass sich der Disk Mover Playground öffnet, und führen Sie das Projekt aus.
-
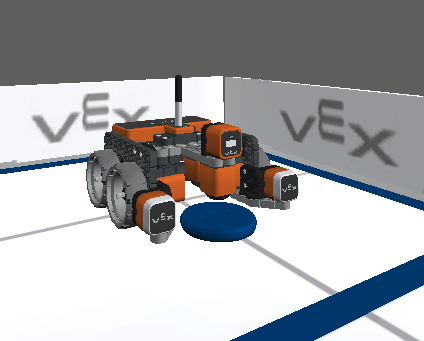
Der VR-Roboter nimmt die erste blaue Scheibe auf, indem er den Elektromagneten erregt, fährt dann rückwärts zurück zum blauen Ziel und lässt die blaue Scheibe fallen.
Wählen Sie die Schaltfläche Weiter um mit dem Rest dieser Lektion fortzufahren.