
관행
학습 섹션에서는 로봇의 행동을 분해하여 로봇이 이동할 경로를 계획하는 방법을 알아보았습니다. 또한 VEXcode EXP의 [Spin] 및 [Spin for] 블록을 사용하여 로봇의 팔과 발톱이 움직이도록 코딩하는 방법도 배웠습니다. 이 연습 섹션에서는 자율 운동 연습 활동에서 배운 내용을 적용해 볼 것입니다.
이 활동에서는 VEXcode EXP 프로젝트를 만들어 반지를 집어 들고 작은 기둥에 올려놓습니다. 아래 영상을 따라 활동에 대한 행동을 분석해 보세요. 그런 다음 이러한 행동을 사용하여 자율 운동 연습 활동을 위한 프로젝트 생성을 시작할 수 있습니다. 아래 영상은 자율 운동 연습 활동을 완료하기 위해 로봇이 어떻게 움직여야 하는지 보여줍니다.
이제 자율 운동 연습 활동을 완료할 차례입니다!
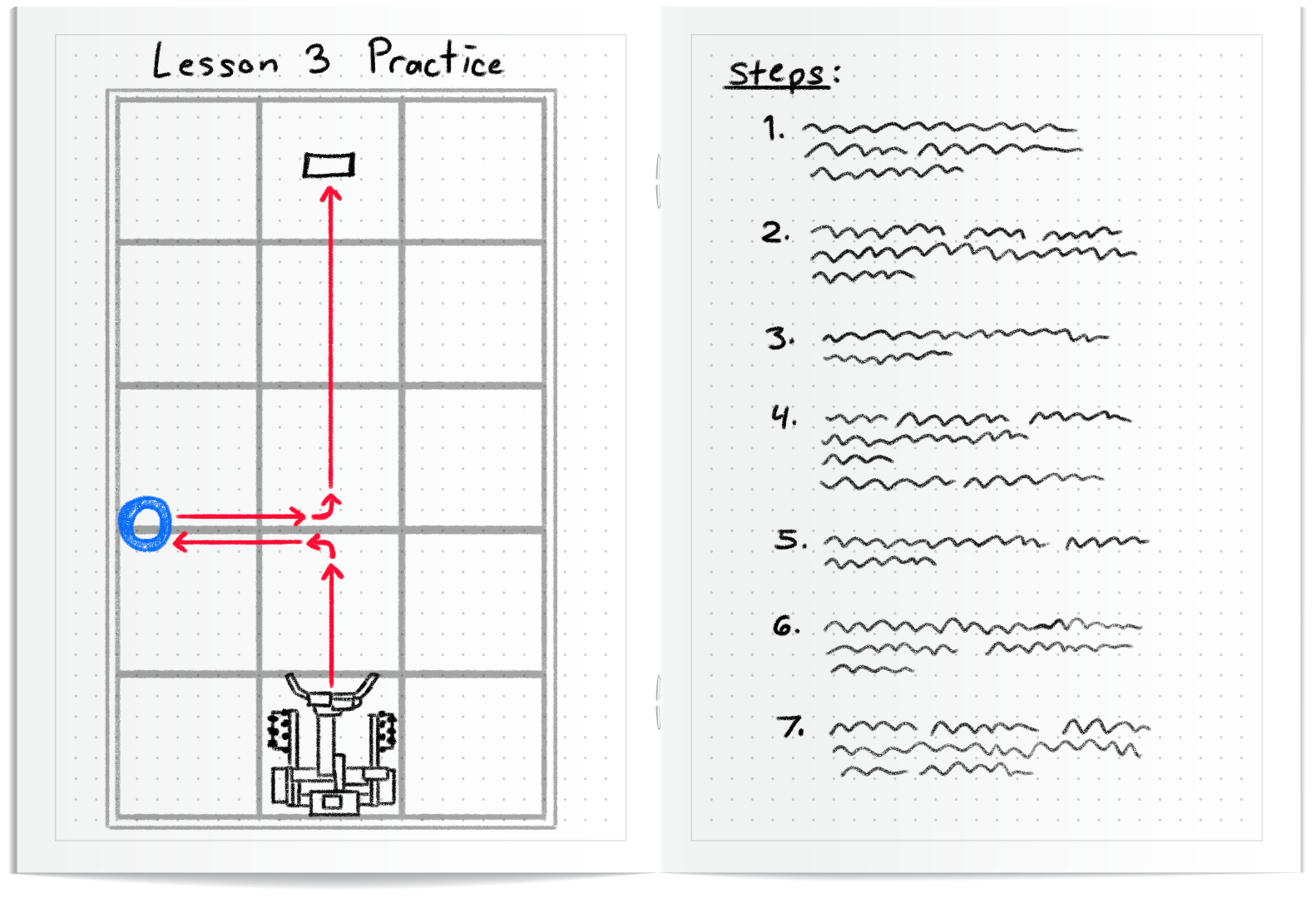
아래 영상에서는 클로봇이 필드 왼쪽에 있습니다. 필드 위쪽, 두 번째와 세 번째 타일 사이에 반지가 하나 있습니다. 필드 중앙, 오른쪽에 기둥 하나가 있습니다. 클로봇은 두 번째와 세 번째 타일로 이동한 다음 첫 번째 링을 향해 이동하여 집어 올립니다. 그러고 나서 발톱을 들어 올리고 뒤로 물러선다. 그 다음, 기둥으로 달려가 집게발을 놓아서 반지가 기둥 위로 떨어지게 합니다. 이는 자율 운동 연습 활동을 완료하기 위해 프로젝트를 만드는 방법의 한 가지 예를 보여줍니다.
자율 운동 활동을 완료하면 엔지니어링 노트북에 프로젝트와 테스트를 기록하세요.
- 로봇이 활동을 완료하기 위해 어떻게 움직여야 하는지 보여주는 스케치를 그립니다.
- 스케치를 기반으로 프로젝트를 만드는 데 필요한 단계를 나열하세요.
- 각 반복 후에 변경한 내용을 문서화하세요.
프로젝트 아이디어와 테스트를 기록하는 방법에 대한 예는 왼쪽 이미지를 참조하세요.
도전에 대비하세요
다음 페이지의 경쟁에서, 코딩 크런치 챌린지에서 로봇이 가능한 한 빨리 두 개의 링을 집어 작은 기둥에 놓도록 코딩해야 합니다. 도전 과제를 완료하는 방법을 알아보고, 이해도를 확인한 다음, 도전 과제를 위해 연습해 보세요.
이 챌린지의 목표는 로봇 픽업 코드를 작성하여 가능한 한 빨리 기둥에 두 개의 고리를 놓는 것입니다.
아래 영상에서는 클로봇이 필드 왼쪽에 있습니다. 필드에는 두 개의 링이 있습니다. 하나는 필드 위쪽, 두 번째와 세 번째 타일 사이에 있고, 다른 하나는 필드 아래쪽, 두 번째와 세 번째 타일 사이에 있습니다. 필드 중앙, 오른쪽에 기둥 하나가 있습니다. 영상은 카운트다운으로 시작합니다: 3, 2, 1. 클로봇은 두 번째와 세 번째 타일로 이동한 다음 첫 번째 링을 향해 이동하여 링을 집어 올립니다. 그러고 나서 발톱을 들어 올리고 뒤로 물러선다. 그다음 기둥으로 달려가 발톱을 놓아 반지가 기둥 위로 떨어지게 합니다. 그 후, 클로봇은 뒤로 물러나서 집게발을 내립니다. 그런 다음 필드 아래쪽의 두 번째 링으로 달려가 공을 집어 들고 돌아서 골대까지 달려갑니다. 클로봇이 집게발을 놓아서 반지가 기둥 위로 떨어지게 합니다. 도전이 완료된 시점에서 타이머가 멈추고 15:13초가 표시됩니다. 이 모든 작업은 로봇이 코딩 크런치 챌린지를 완료하기 위해 어떻게 움직일 수 있는지 보여주는 예로서 자율적으로 수행됩니다.
이 문서의 단계를 따라 이 과제를 완료하는 방법에 대해 자세히 알아보세요. Google / .docx / .pdf