
ฝึกฝน
ในส่วนการเรียนรู้ คุณจะได้เรียนรู้วิธีวางแผนเส้นทางที่คุณต้องการให้หุ่นยนต์ของคุณดำเนินไปโดยการย่อยสลายพฤติกรรม นอกจากนี้ คุณยังได้เรียนรู้วิธีการเขียนโปรแกรมแขนและกรงเล็บของหุ่นยนต์ให้เคลื่อนที่โดยใช้บล็อก [Spin] และ [Spin for] ใน VEXcode EXP อีกด้วย ในส่วนการปฏิบัตินี้ คุณจะเริ่มนำการเรียนรู้ไปประยุกต์ใช้ในการฝึกฝนกิจกรรมการเคลื่อนไหวอัตโนมัติ
ในกิจกรรมนี้ คุณจะสร้างโครงการ VEXcode EXP เพื่อหยิบวงแหวนและวางไว้บนเสาเล็ก ทำตามวิดีโอด้านล่างเพื่อวิเคราะห์พฤติกรรมของกิจกรรม จากนั้นคุณสามารถใช้พฤติกรรมเหล่านั้นเพื่อเริ่มสร้างโครงการสำหรับกิจกรรมฝึกฝนการเคลื่อนไหวอัตโนมัติ วิดีโอข้างล่างจะแสดงให้คุณเห็นว่าหุ่นยนต์ของคุณควรเคลื่อนไหวอย่างไรเพื่อทำกิจกรรมฝึกฝนการเคลื่อนไหวอัตโนมัติให้เสร็จสมบูรณ์
ตอนนี้ถึงตาคุณแล้วที่จะทำกิจกรรมฝึกฝนการเคลื่อนไหวอัตโนมัติให้เสร็จสิ้น!
ในวิดีโอข้างล่าง Clawbot จะอยู่ทางด้านซ้ายของสนาม มีแหวนหนึ่งวงอยู่บนสนามซึ่งอยู่ใกล้ด้านบนของสนาม ระหว่างไทล์ที่สองและสาม มีเสาเดี่ยวอยู่กลางสนามทางด้านขวา Clawbot ขับไปที่กระเบื้องที่สองและสาม จากนั้นเคลื่อนที่ขึ้นไปที่วงแหวนแรก และหยิบวงแหวนขึ้นมา จากนั้นก็ยกกรงเล็บขึ้นและถอยหลังไป จากนั้นมันจะขับไปที่เสาและปล่อยกรงเล็บ ปล่อยให้แหวนตกลงบนเสา ตัวอย่างนี้แสดงให้เห็นหนึ่งตัวอย่างของวิธีการสร้างโครงการเพื่อดำเนินกิจกรรมฝึกการเคลื่อนไหวอัตโนมัติให้เสร็จสมบูรณ์
ใช้เอกสารนี้เป็นข้อมูลอ้างอิงในการทำกิจกรรมฝึกปฏิบัติ
Google / .docx / .pdf
เมื่อคุณทำกิจกรรมการเคลื่อนไหวอัตโนมัติเสร็จสิ้น ให้บันทึกโครงการและการทดสอบของคุณ ลงในสมุดบันทึกวิศวกรรมของคุณ
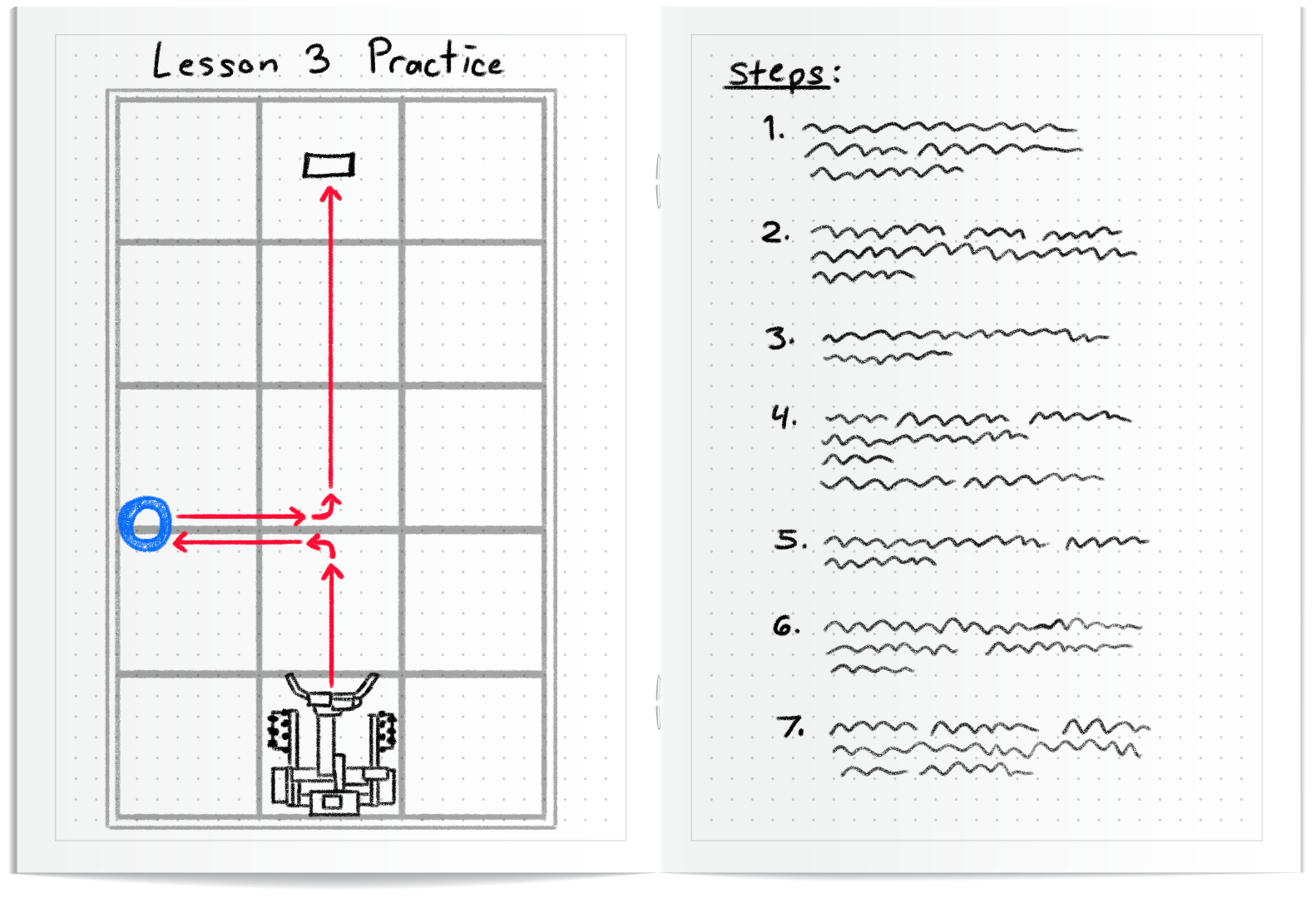
- วาดภาพร่างเพื่อแสดงให้เห็นว่าหุ่นยนต์ของคุณควรเคลื่อนไหวอย่างไรเพื่อดำเนินกิจกรรมให้เสร็จสมบูรณ์
- ระบุขั้นตอนที่จำเป็นในการสร้างโครงการ ตามแบบร่างของคุณ
- บันทึกการเปลี่ยนแปลงที่คุณทำหลังจากการทำซ้ำแต่ละครั้ง
ดูรูปภาพ ทางด้านซ้ายเพื่อดูตัวอย่างวิธีบันทึกแนวคิดและการทดสอบของโครงการของคุณ
เตรียมพร้อมรับความท้าทาย
ในการแข่งขัน Compete (ในหน้าถัดไป) คุณจะต้องเขียนโค้ดให้หุ่นยนต์ของคุณหยิบและวางแหวน 2 วงบนเสาเล็กให้ได้เร็วที่สุดในการแข่งขัน Coding Crunch Challenge เรียนรู้วิธีทำภารกิจ ให้สำเร็จ ตรวจสอบความเข้าใจของคุณ จากนั้นฝึกฝนภารกิจนั้น
เป้าหมายของความท้าทายนี้คือการเขียนโค้ดให้หุ่นยนต์หยิบและวางแหวนสองวงบนเสาให้ได้เร็วที่สุด
ในวิดีโอข้างล่าง Clawbot จะอยู่ทางด้านซ้ายของสนาม มีวงแหวนสองวงบนสนาม วงหนึ่งตั้งอยู่ใกล้ด้านบนของสนาม ระหว่างแผ่นที่สองและสาม และอีกวงหนึ่งอยู่ใกล้กับด้านล่างของสนาม ระหว่างแผ่นที่สองและสามเช่นกัน มีเสาเดี่ยวอยู่กลางสนามทางด้านขวา วิดีโอเริ่มด้วยการนับถอยหลัง: 3, 2, 1 Clawbot ขับไปที่กระเบื้องที่สองและสาม จากนั้นเคลื่อนขึ้นไปที่แหวนวงแรกและหยิบแหวนขึ้นมา จากนั้นก็ยกกรงเล็บขึ้นและถอยหลังไป ถัดไป มันจะขับไปที่เสาและปล่อยกรงเล็บ ปล่อยให้แหวนตกลงบนเสา จากนั้น Clawbot จะถอยหลังแล้วลดกรงเล็บลง จากนั้นจึงขับไปยังวงแหวนที่ 2 ที่ด้านล่างของสนาม หยิบขึ้นมา หมุน แล้วขับไปที่เสา Clawbot ปล่อยกรงเล็บ ทำให้แหวนหล่นลงบนเสา ตัวจับเวลาจะหยุดลง ณ จุดนี้ เนื่องจากความท้าทายเสร็จสิ้นแล้ว และแสดงเวลา 15:13 วินาที ทั้งหมดนี้ทำขึ้นโดยอัตโนมัติเป็นตัวอย่างว่าหุ่นยนต์ของคุณเคลื่อนที่ไปทำ Coding Crunch Challenge ได้
ปฏิบัติตามขั้นตอนในเอกสารนี้เพื่อเรียนรู้เพิ่มเติมเกี่ยวกับวิธีทำภารกิจนี้ให้สำเร็จ Google / .docx / .pdf
ตรวจสอบความเข้าใจของคุณ
ก่อนจะเริ่มการท้าทาย ให้แน่ใจว่าคุณเข้าใจกฎและการตั้งค่าของการท้าทายแล้ว โดยตอบคำถามในเอกสารด้านล่างนี้ในสมุดบันทึกวิศวกรรมของคุณ
ตรวจสอบความเข้าใจของคุณ คำถาม Google / .docx / .pdf
หลังจากทำคำถามเสร็จแล้ว ลองฝึกฝนการท้าทายดู
เลือก ถัดไป > เพื่อแข่งขันใน Coding Crunch Challenge