
Toneelstuk
Deel 1 - Stap voor stap
- InstructieGeef elke groep de instructie dat ze het voorbeeldproject 'Obstakels vermijden' in VEXcode GO gaan openen en starten om te zien hoe de oogsensor objecten detecteert.
Codebasis Obstakels vermijden - ModelModel voor studenten met de stappen om VEXcode GO te starten.
- Model the steps to connect a Brain to your device.
Opmerking: Wanneer u uw Code Base voor het eerst op uw apparaat aansluit, kan het zijn dat de Gyro die in de Brain is ingebouwd, wordt gekalibreerd, waardoor de Code Base even zelfstandig beweegt. Dit is normaal gedrag. Raak de codebasis niet aan tijdens het kalibreren.
-
Studenten gebruiken een voorbeeldproject om meer te leren over opdrachten met betrekking tot de oogsensor in VEXcode GO. Model voor studenten over het openen van het voorbeeldproject 'Obstakels vermijden'.

Project Obstakels Vermijden - Model voor studenten Hoe je het voorbeeldproject opslaat en een naam geeft Obstakels vermijden. Studenten moeten vervolgens hun codebasis in het veld plaatsen en het starten.
- Let op: Als u geen 'Walls for the Tiles' hebt, kunt u klaslokaalbenodigdheden zoals boeken gebruiken om een ruimte in te richten waar leerlingen de projecten kunnen testen. Het testgebied moet vlak zijn en, indien mogelijk, moeten er aan alle kanten voorwerpen liggen.
-

Codebasis in het veld
-
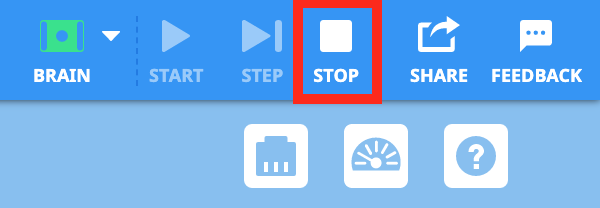
Dit project heeft een [Forever]-blok eromheen. Om het project te stoppen nadat de Code Base een muur heeft gedetecteerd, moeten studenten 'Stoppen' selecteren in de werkbalk.
Stop het project - Studenten moeten opmerken dat de Code Base een muur detecteert, achteruit rijdt en vervolgens naar rechts afslaat. Laat de leerlingen het project opnieuw starten en kijk hoe lang de Code Base dit patroon herhaalt wanneer er een muur wordt gedetecteerd.
- BegeleidenBegeleid een discussie met studenten over het project en de Oogsensor.
- Hoe lang denk je dat de Code Base objecten zal detecteren en dan naar rechts zal gaan? Wijs de leerlingen op het [Forever]-blok dat rond het hoofdonderdeel van het project loopt.
- Beschrijf hoe de Code Base zou bewegen als deze vier muren zou detecteren. Welke vorm zou de Code Base aannemen?
- Hoe ver moet de Code Base van een muur af zijn voordat deze wordt gedetecteerd? Schat of leg met je handen uit hoe ver het is.
- HerinneringHerinner de leerlingen eraan dat de oogsensor aan de hersenen moet worden bevestigd voordat de hersenen worden ingeschakeld, zodat deze goed kunnen werken. Als de oogsensor wordt bevestigd of verwijderd nadat de hersenen al zijn ingeschakeld, moet de hersenen worden uit- en weer ingeschakeld om de oogsensor goed te laten functioneren.
Herinner groepen eraan om de Monitor Console te openen en te observeren nadat het project is gestart. Ze kunnen observeren wanneer de <Eye found object> 'WAAR' aangeeft.
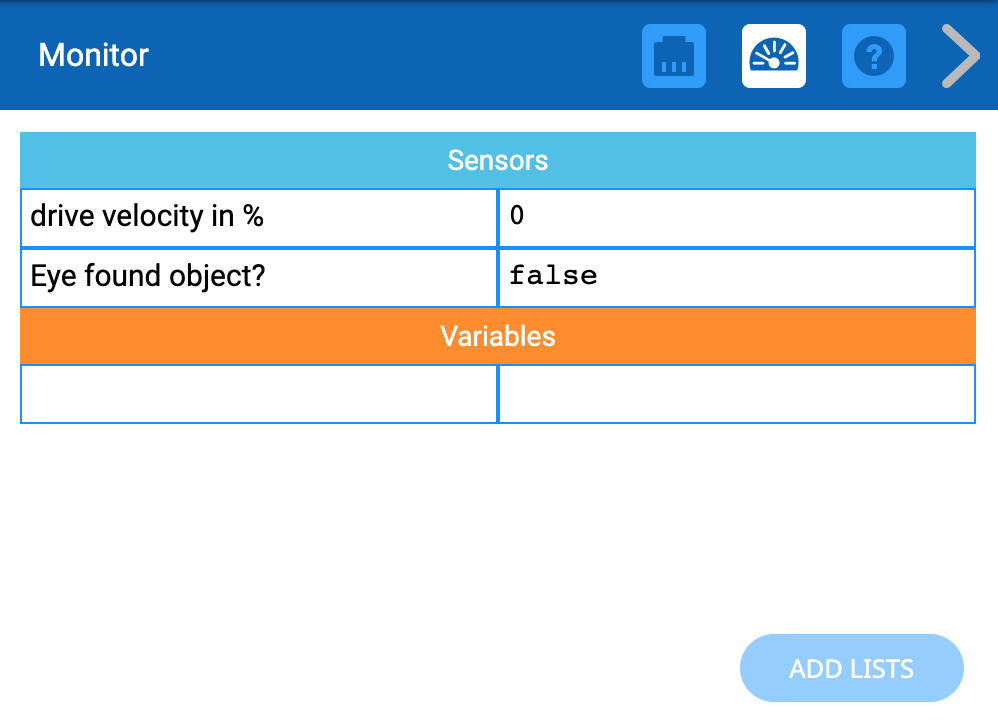
Monitorconsole - VraagVraag leerlingen hoe ze objectdetectie in hun dagelijks leven kunnen gebruiken.
Om een grappig voorbeeld te geven: als ze op school achteruit door de gangen willen lopen, kunnen ze een sensor gebruiken die aangeeft wanneer ze te dicht bij een muur of iemand anders komen! Welke andere manieren kunnen ze bedenken om de objectdetectiefunctie van de oogsensor te gebruiken?
Pauze halverwege het spel & Groepsdiscussie
Zodra iedere groep het voorbeeldproject 'Obstakels vermijden'heeft getoetst, komen jullie kort bij elkaar voor een gesprek.
- Wat heeft de oogsensor gedetecteerd in dit voorbeeldproject?
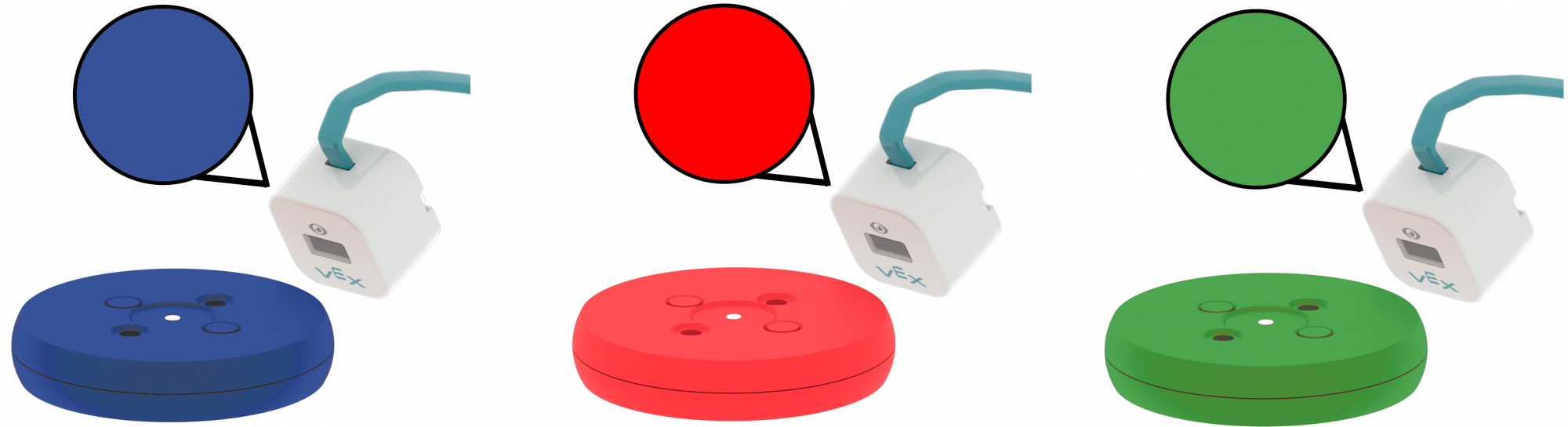
- De oogsensor kan ook kleur detecteren! Vervolgens maken we een project waarin de codebasis verschillende acties uitvoert als de oogsensor groen, blauw of rood detecteert.
- Laten we eerst oefenen. Wanneer u groen ziet, steekt u uw rechterhand op. Wanneer u blauw ziet, steekt u uw linkerhand omhoog. Wanneer u rood ziet, steek dan beide handen omhoog. (De leraar moet vervolgens 3 voorwerpen omhoog houden en kijken of de leerlingen het patroon kunnen volgen. (Herhaal het spel zo vaak als nodig.)
Deel 2 - Stap voor stap
- InstructieGeef elke groep de instructie dat ze een project gaan maken waarbij de Code Base de kleurdetectiefunctie van de oogsensor gebruikt om door een doolhof van gekleurde schijven te navigeren. Studenten voegen schijven toe aan hun veld om het doolhof van gekleurde schijven te creëren. Vervolgens maken ze een project waarin de Code Base door het doolhof rijdt en naar rechts, links of stopt, afhankelijk van de kleur van de schijf die wordt gedetecteerd.
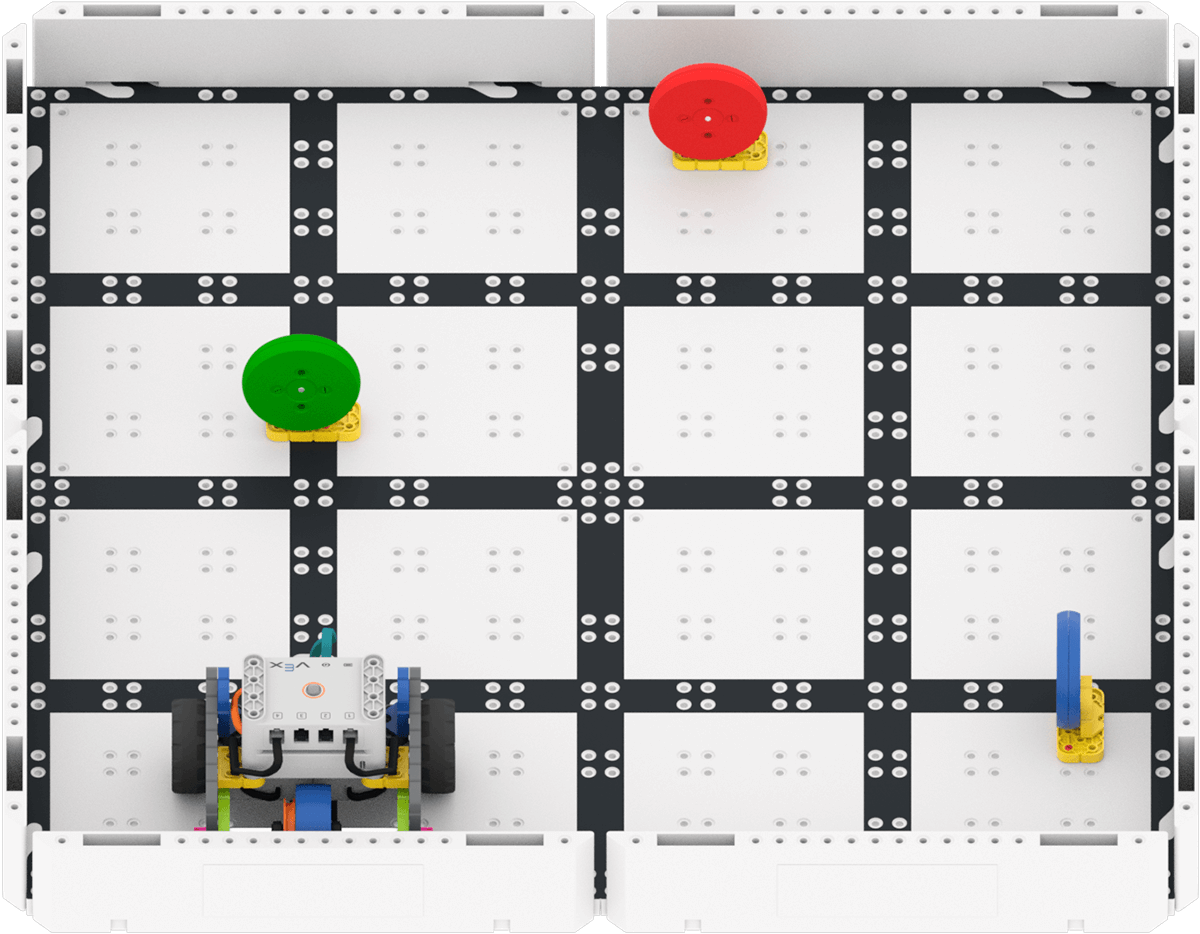
Bekijk de onderstaande animatie om te zien hoe de Code Base beweegt om het doolhof te voltooien. In deze animatie begint de Code Base in de linker benedenhoek van het veld, tegenover de groene schijf op het veld. Hij rijdt vooruit totdat de groene schijf wordt gedetecteerd, rijdt dan achteruit en draait 90 graden naar rechts om de volgende schijf te bereiken. Vervolgens rijdt de robot vooruit totdat de blauwe schijf wordt gedetecteerd. Vervolgens rijdt hij achteruit en draait hij 90 graden naar links om de laatste schijf te bereiken. Ten slotte rijdt de robot vooruit totdat de rode schijf wordt gedetecteerd en stopt dan.
Videobestand - ModelModel met behulp van een groepsopstelling, hoe VEXcode GO te starten. Als ze VEXcode GO al open hebben staan vanuit Play Part 1, laat de leerlingen dan zien hoe ze het menu Bestand kunnen openen en 'Nieuw blokkenproject' kunnen selecteren.
- Zodra het project geopend is, laat u de leerlingen het project opslaan als Color Disk Maze.
- Studenten de Code Base configureren om de blokken te zien die ze nodig hebben in de Toolbox.
- Model the steps to connect a Brain to your device.
-
Eerst maken leerlingen een project om de groene en blauwe schijven in het doolhof te detecteren. Laat leerlingen zien hoe ze het project in deze afbeelding kunnen nabootsen. Ze moeten blokken toevoegen en parameters wijzigen om de code te repliceren.
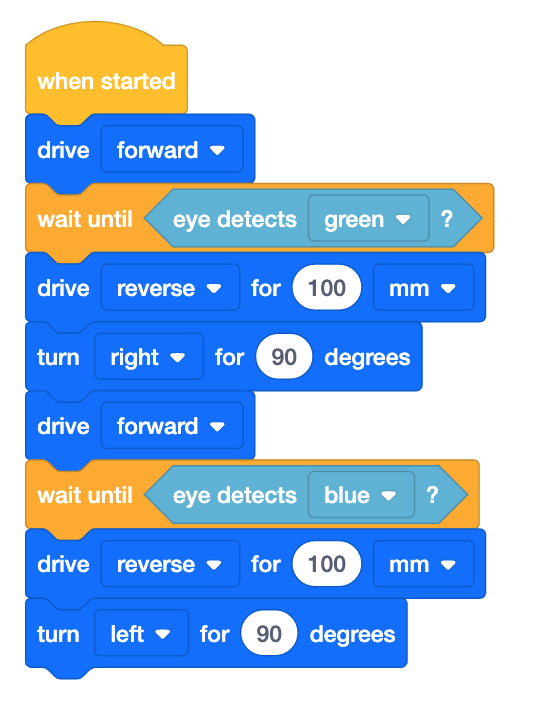
Kleurenschijf Doolhof: Groen en Blauw Detecteren
OPMERKING:Studenten moeten mogelijk de parameters in het project wijzigen, afhankelijk van de plaatsing van de schijven in de gekleurde schijvendoolhofopstelling. Wij raden u aan om uw 2x2-veld in te stellen voordat u met het Lab begint en het project te testen. Als het mogelijk is. Zie de dia 'Kleurenschijfdoolhof' in de Lab 4-diavoorstelling voor instructies over het plaatsen van elke schijf in het kleurenschijfdoolhof. Als je niet genoeg tegels of muren hebt voor het doolhof met gekleurde schijven, kun je de gekleurde schijven in een vergelijkbare configuratie op een glad oppervlak plaatsen, zoals de vloer of een bureau.
-
Nu de Code Base is geconfigureerd, de Brain is aangesloten en het project is gerepliceerd, modelleert u voor de studenten het project kunnen opslaan en noemt u het Color Disk Maze.

Geef het project een naam -
Leerlingen moeten de drie gekleurde schijven aan het veld toevoegen om het doolhof van gekleurde schijven te creëren.
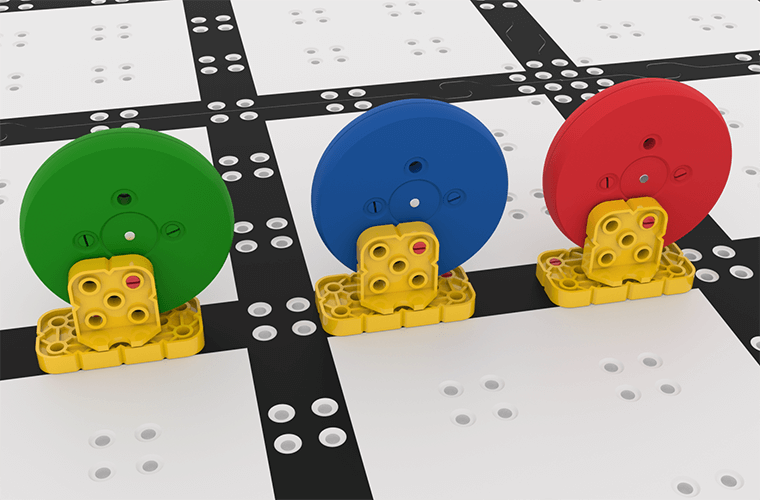
Schijfconstructie -
Zodra de schijven zijn toegevoegd, moeten leerlingen hun codebasis aan het begin van het doolhof van gekleurde schijven plaatsen (met de oogsensor uitgelijnd op de zwarte lijn van de tegel) en het project starten. Laat de leerlingen observeren hoe de Code Base reageert wanneer de oogsensor de kleuren groen en blauw detecteert. Zodra het project klaar is, vraagt u de leerlingen om het project te stoppen.
Kleurenschijf Doolhof -
Studenten gaan nu hun code bewerken om de rode schijf toe te voegen. Laat leerlingen zien hoe ze extra blokken aan hun project kunnen toevoegen, zodat de codebasis naar de rode schijf rijdt en daar stopt.

Kleuren Schijf Doolhof: Voeg Detect Rood - Laat de leerlingen hun codebasis aan het begin van het doolhof van de kleurenschijven plaatsen en het projectstarten. Zodra het project klaar is, vraagt u de leerlingen om het project te stoppen.
- FaciliterenFaciliteer een discussie met studenten terwijl ze hun projecten bewerken en testen.
- Hoe ver moet de codebasis zich van een schijf verwijderen voordat de kleur wordt gedetecteerd? Schat of leg met je handen uit hoe ver het is.
- Wat denk je dat er zou gebeuren als het laatste blok in het project een [Drive]-blok was? Weet de Code Base wanneer hij moet stoppen met rijden?
- HerinneringHerinner de leerlingen eraan dat de oogsensor aan de hersenen moet worden bevestigd voordat de hersenen worden ingeschakeld, zodat deze goed kunnen werken. Als de oogsensor wordt bevestigd of verwijderd nadat de hersenen al zijn ingeschakeld, moet de hersenen worden uit- en weer ingeschakeld om de oogsensor goed te laten functioneren.
- Herinner groepen er ook aan om hun parameters te controleren nadat ze het project opnieuw hebben aangemaakt, om er zeker van te zijn dat ze overeenkomen met de afbeelding van de code.
- Terwijl de projecten lopen, herinnert u de leerlingen eraan om het Monitor-venster te openen en te kijken wanneer de oogsensor een kleur detecteert.
Oogsensor detecteert kleur - VraagVraag de leerlingen welke apparaten of voorwerpen ze kunnen bedenken die gebruikmaken van oogsensoren. Voorbeelden hiervan zijn slimme deurbellen of camera's met bewegingssensoren.