
Jugar
Parte 1 - Paso a paso
- InstruirInstruya a cada grupo que abrirán e iniciarán el proyecto de ejemplo 'Cómo evitar obstáculos' en VEXcode GO para ver cómo el sensor ocular detecta objetos.
Código base Evitando obstáculos - ModeloModelo para estudiantes los pasos para lanzar VEXcode GO.
- Modele los pasos para conectar un cerebro a su dispositivo.
Nota: Cuando conecta por primera vez su Code Base a su dispositivo, el giroscopio integrado en el cerebro puede calibrarse, lo que hace que la Code Base se mueva por sí sola por un momento. Este es un comportamiento esperado, no toque la base de código mientras se está calibrando.
-
Los estudiantes utilizarán un proyecto de ejemplo para ayudarlos a aprender sobre los comandos relacionados con el sensor ocular en VEXcode GO. Modelo para que los estudiantes abran el proyecto de ejemplo “Cómo evitar obstáculos”.
Proyecto Evitando Obstáculos - Modele para los estudiantes cómo guardar el proyecto de ejemplo y asígnele el nombre Evitar obstáculos. Luego, los estudiantes deben colocar su código base en el campo y iniciar el proyecto.
- Nota: Si no tiene paredes para los mosaicos, use elementos del aula, como libros, para preparar un espacio donde los estudiantes puedan probar los proyectos. El área de prueba debe ser plana y tener objetos en los cuatro lados si es posible.
-
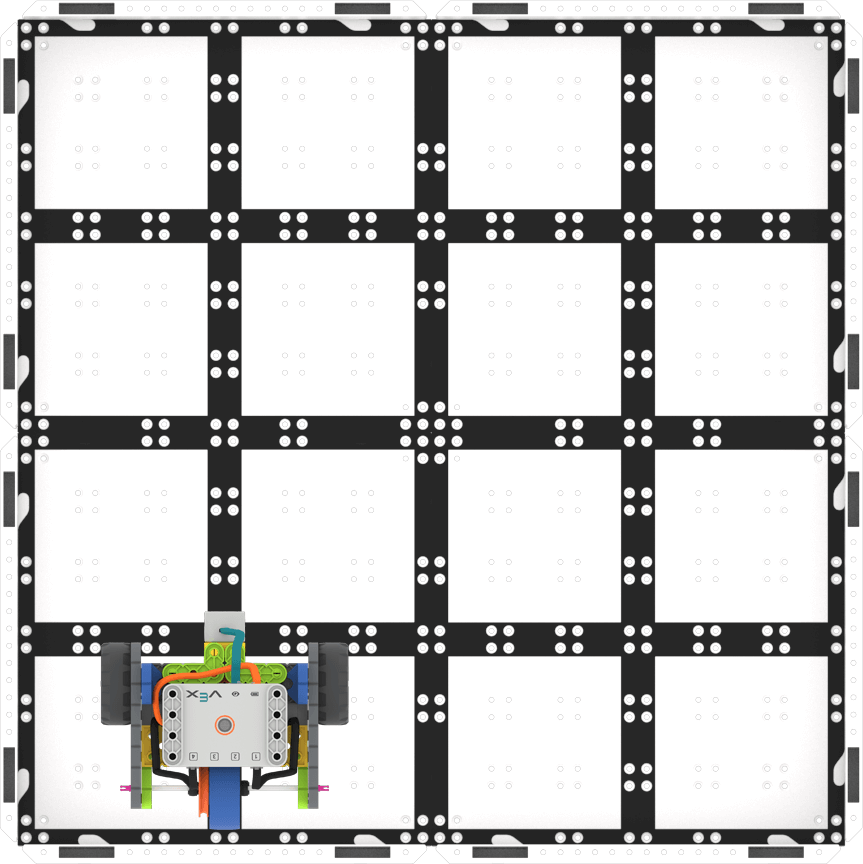
Código base en el campo
-
Este proyecto tiene un bloque [Para siempre] a su alrededor. Para que el proyecto deje de ejecutarse después de que Code Base detecte una pared, los estudiantes deberán asegurarse de seleccionar "Detener" en la barra de herramientas.
Detener el proyecto - Los estudiantes deben observar que el Código Base detecta una pared, retrocede y luego gira a la derecha. Haga que los estudiantes comiencen el proyecto nuevamente y vean durante cuánto tiempo el Código Base repetirá este patrón cuando se detecte una pared.
- FacilitarFacilitar una discusión con los estudiantes sobre el proyecto y el sensor ocular.
- ¿Cuánto tiempo crees que el Código Base detectará objetos y luego girará a la derecha? Señale a los estudiantes el bloque [Para siempre] que rodea la parte principal del proyecto.
- Describe cómo se movería el Código Base si detectara cuatro paredes. ¿En qué forma se movería el Código Base?
- ¿A qué distancia aproximadamente se aleja Code Base de una pared antes de detectarla? Estima o usa tus manos para explicar qué tan lejos.
- RecordarRecuerde a los estudiantes que el sensor ocular debe estar conectado al cerebro antes de encenderlo para que funcione correctamente. Si el sensor ocular se coloca o se quita después de que el cerebro ya se haya encendido, es necesario reiniciar el cerebro (apagarlo y encenderlo nuevamente) para que el sensor ocular funcione correctamente.
Recuerde a los grupos que abran y observen la Consola del monitor después de iniciar el proyecto. Podrán observar cuando el <Eye found object> reporta 'VERDADERO'.
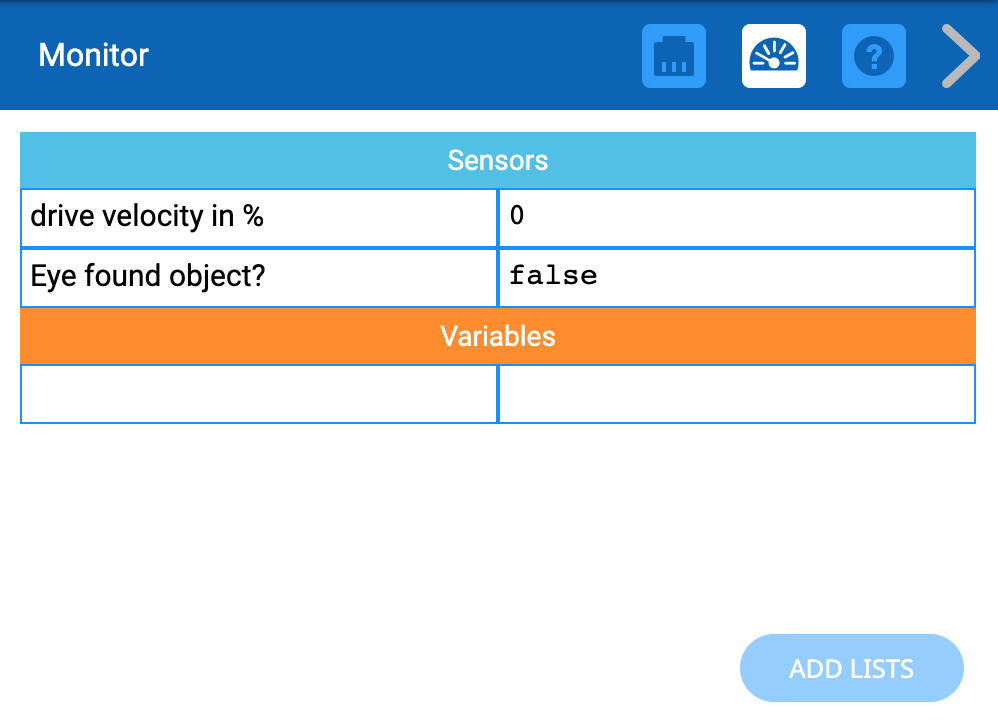
Consola de monitor - PreguntePregunte a los estudiantes cómo podrían utilizar la detección de objetos en su vida cotidiana.
Por poner un ejemplo tonto, si quisieran caminar hacia atrás por los pasillos de la escuela, podrían usar un sensor que les indicara cuándo se acercan demasiado a una pared o a otra persona. ¿Qué otras formas de utilizar la función de detección de objetos del sensor ocular se les ocurren?
Pausa a mitad de juego & Discusión en grupo
Tan pronto como cada grupo haya probado el proyecto de ejemplo'Cómo evitar obstáculos', reúnanse para una breve conversación.
- ¿Qué detectó el sensor ocular en este proyecto de ejemplo?
- ¡El sensor ocular también puede detectar colores! A continuación, crearemos un proyecto en el que, si el sensor ocular detecta verde, azul o rojo, el código base realiza diferentes acciones.
- Primero practiquemos. Cuando veas verde, levanta la mano derecha. Cuando veas azul, levanta la mano izquierda. Cuando veas rojo, levanta ambas manos. (Luego, el profesor debe sostener 3 objetos y ver si los estudiantes pueden seguir el patrón. Repite el juego tantas veces como sea necesario.)
Parte 2 - Paso a paso
- InstruirInstruya a cada grupo que crearán un proyecto en el que el código base utiliza la función de detección de color del sensor ocular para navegar por un laberinto de discos de color. Los estudiantes agregarán discos a su campo para crear el laberinto de discos de colores. Luego, crearán un proyecto donde el Código Base conduce a través del laberinto y gira a la derecha, izquierda o se detiene dependiendo del color del Disco que se detecte.
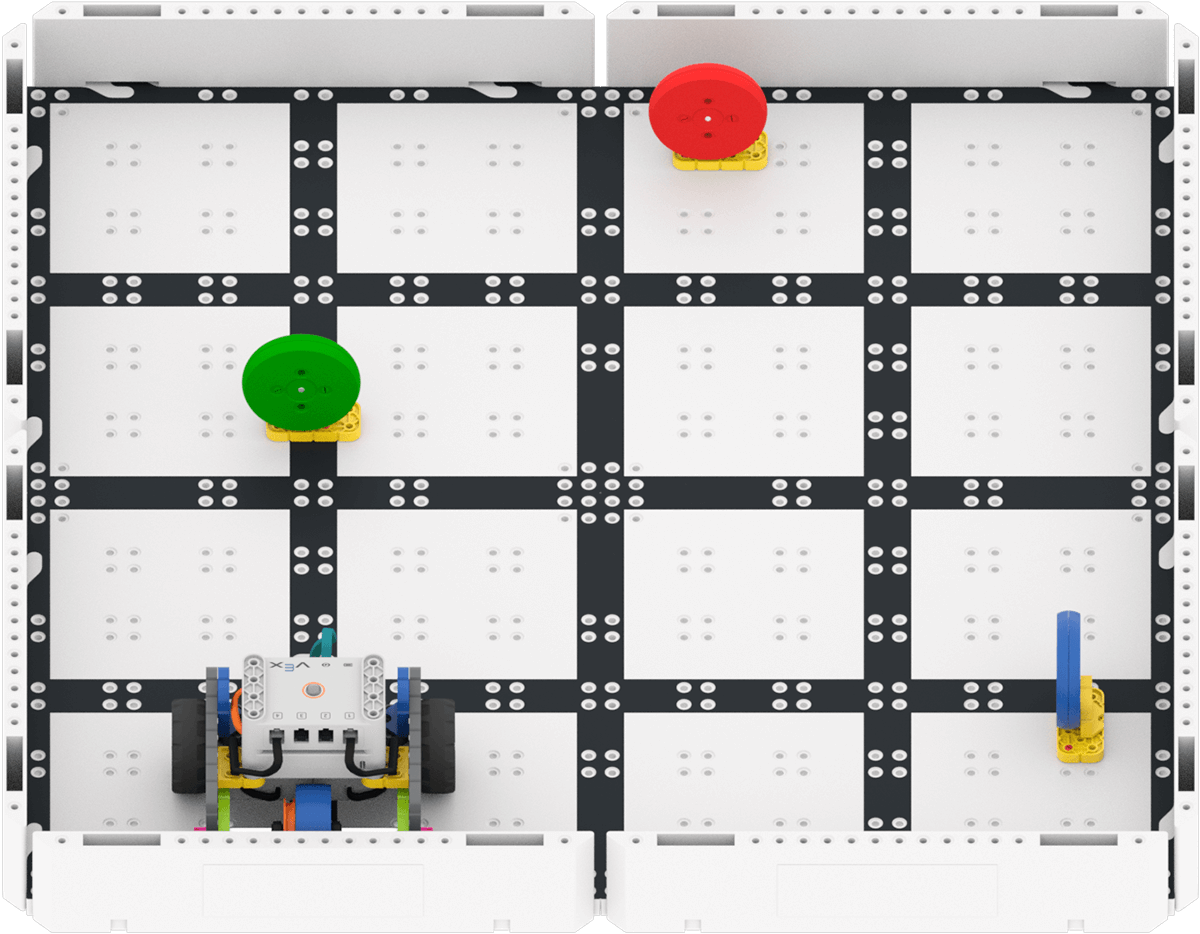
Mira la animación a continuación para ver cómo se moverá el Código Base para completar el laberinto. En esta animación, el código base comienza en la esquina inferior izquierda del campo, frente al disco verde del campo. Avanza hasta que detecta el Disco Verde, luego retrocede y gira 90 grados a la derecha para mirar hacia el siguiente disco. Luego, el robot avanza hasta detectar el Disco Azul, luego retrocede y gira 90 grados a la izquierda para quedar frente al disco final. Por último, el robot avanza hasta que detecta el disco rojo y luego se detiene.
Archivo de vídeo - ModeloModelo usando la configuración de un grupo, cómo iniciar VEXcode GO. Si ya tienen VEXcode GO abierto desde la Parte 1 del juego, modele para los estudiantes cómo abrir el menú Archivo y seleccionar 'Nuevo proyecto de bloques'.
- Una vez abierto el proyecto, pida a los estudiantes que lo guarden como Laberinto de discos de colores.
- Los estudiantes necesitarán configurar la base de código para ver los bloques que necesitan en la Caja de herramientas.
- Modele los pasos para conectar un cerebro a su dispositivo.
-
Los estudiantes primero construirán un proyecto para detectar los discos verde y azul en el laberinto. Modelo para que los estudiantes puedan replicar el proyecto en esta imagen. Necesitarán agregar bloques y cambiar parámetros según sea necesario para replicar el código.
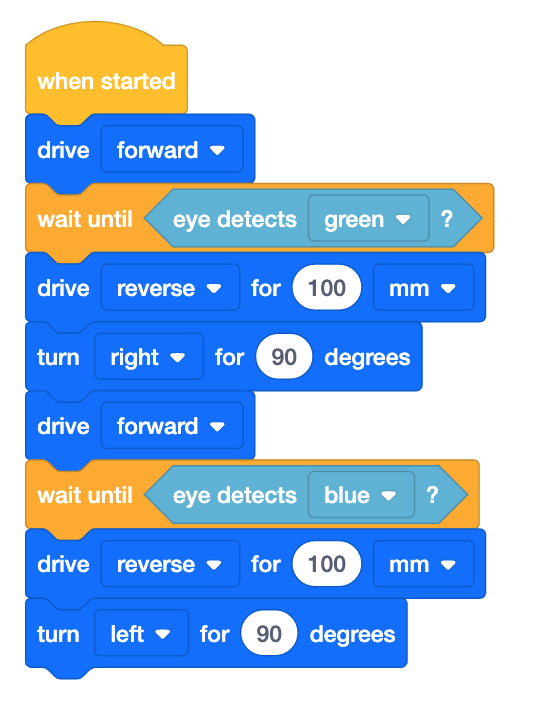 Laberinto de discos de colores
Laberinto de discos de colores : Detecta el verde y el azul
NOTA:Es posible que los estudiantes necesiten cambiar los parámetros del proyecto dependiendo de la ubicación de los discos en el laberinto de discos de colores. Le sugerimos que configure su campo 2x2 antes de comenzar el laboratorio y pruebe el proyecto. Si es posible. Consulte la diapositiva "Laberinto de discos de colores" en la presentación de imágenes del Laboratorio 4 para obtener orientación sobre la ubicación de cada disco en el laberinto de discos de colores. Si no tienes suficientes mosaicos o paredes para el laberinto de discos de colores, coloca los discos de colores en una configuración similar sobre una superficie lisa, como el piso o un escritorio.
-
Ahora que el código base está configurado, el cerebro está conectado y el proyecto está replicado, modele para los estudiantes cómo guardar el proyecto y nómbrelo Laberinto de discos de colores.

Nombra el proyecto -
Los estudiantes deben agregar los tres discos de colores al campo para crear el laberinto de discos de colores.
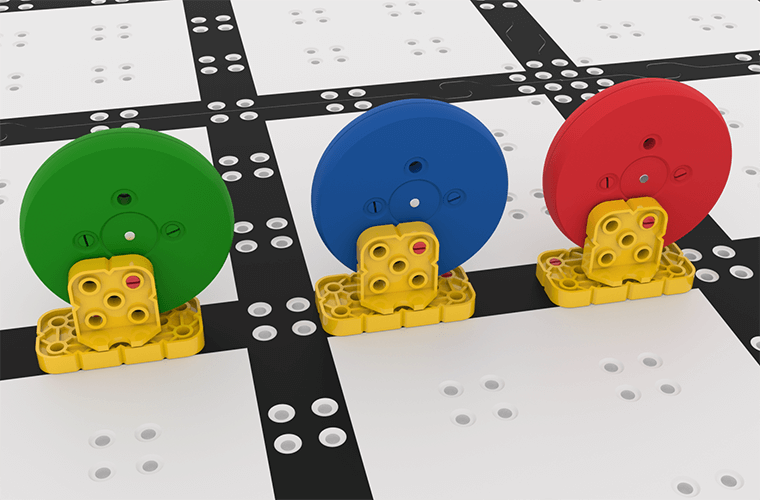
Construcción de disco -
Una vez agregados los discos, los estudiantes deben colocar su base de código al comienzo del laberinto de discos de color (con el sensor ocular alineado con la línea negra del mosaico) y comenzar el proyecto. Haga que los estudiantes observen cómo responde el código base cuando el sensor ocular detecta los colores verde y azul. Una vez que el proyecto haya terminado de ejecutarse, indique a los estudiantes que detengan el proyecto.
 Laberinto de discos de colores
Laberinto de discos de colores -
Ahora los estudiantes editarán su código para incluir el Disco Rojo. Modelo para que los estudiantes agreguen bloques adicionales a su proyecto para que el código base llegue al disco rojo y se detenga.
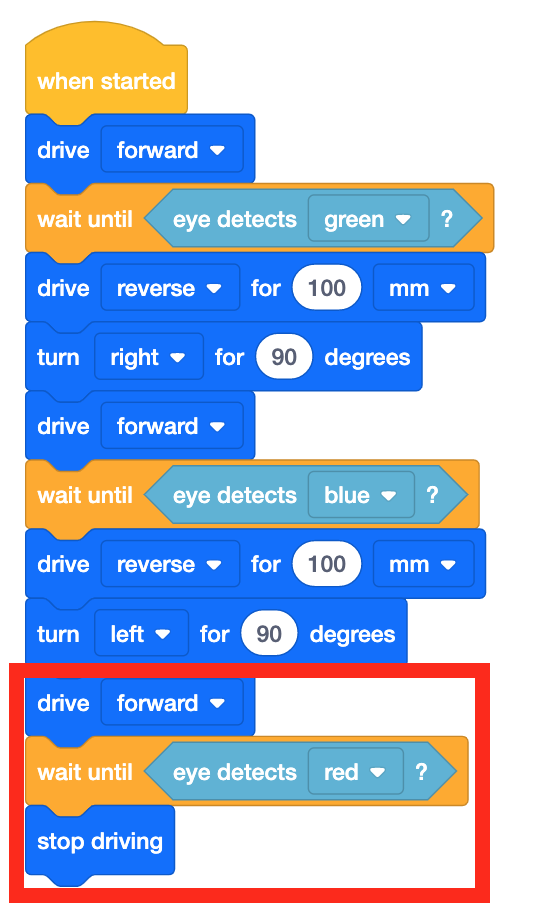 Laberinto de discos de colores
Laberinto de discos de colores : añade detección de rojo - Pida a los estudiantes que coloquen su código base al comienzo del laberinto de discos de colores y una vez más inicien el proyecto. Una vez que el proyecto haya terminado de ejecutarse, indique a los estudiantes que lo detengan.
- FacilitarFacilitar una discusión con los estudiantes mientras editan y prueban sus proyectos.
- ¿Aproximadamente a qué distancia de un disco se aleja el código base antes de detectar el color? Estima o usa tus manos para explicar qué tan lejos.
- ¿Qué crees que pasaría si el último bloque del proyecto fuera un bloque [Drive]? ¿El Código Base sabría cuándo dejar de conducir?
- RecordarRecuerde a los estudiantes que el sensor ocular debe estar conectado al cerebro antes de encenderlo para que funcione correctamente. Si el sensor ocular se coloca o se quita después de que el cerebro ya se haya encendido, es necesario reiniciar el cerebro (apagarlo y encenderlo nuevamente) para que el sensor ocular funcione correctamente.
- Además, recuerde a los grupos que verifiquen sus parámetros después de recrear el proyecto para asegurarse de que coincidan con la imagen del código.
- Mientras se ejecutan los proyectos, recuerde a los estudiantes que abran la ventana del Monitor y observen cuándo el sensor ocular detecta un color.
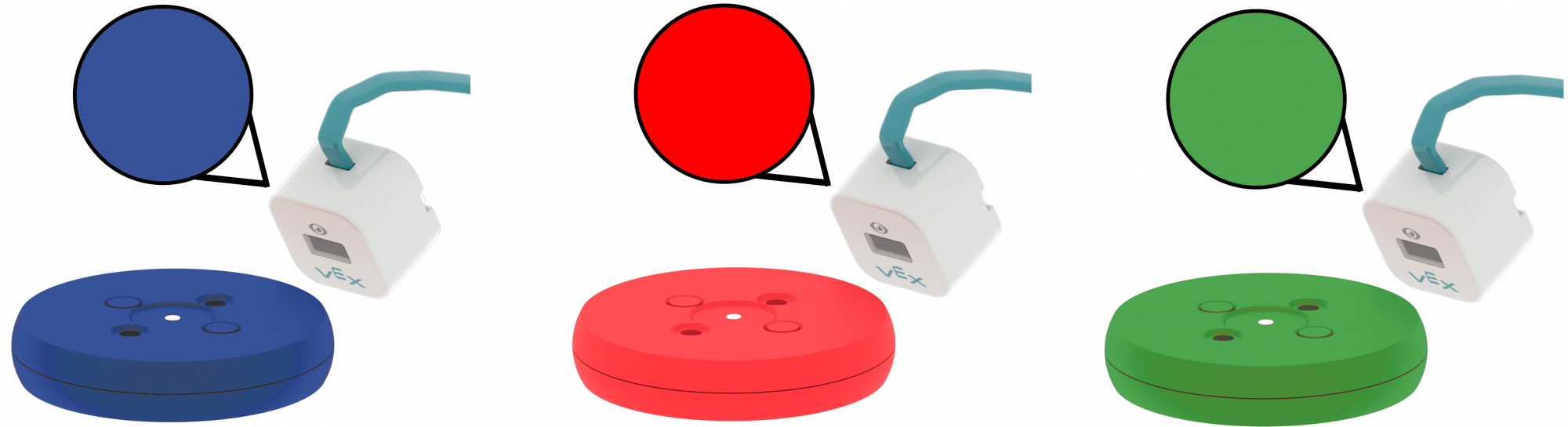
El sensor ocular detecta el color - PreguntaPregunte a los estudiantes qué dispositivos o elementos pueden imaginar que utilicen sensores oculares. Algunos ejemplos podrían incluir timbres inteligentes o cámaras con sensores de movimiento.