
ในบทเรียนนี้คุณจะใช้หน้าจออุปกรณ์บนสมองหุ่นยนต์ EXP เพื่อรวบรวมพิกัด x, y และ z ของตำแหน่งต่างๆบน CTE Tile
ในบทเรียนนี้คุณจะได้เรียนรู้เกี่ยวกับ:
- การใช้หน้าจออุปกรณ์บนสมอง
- การดูตำแหน่ง x, y, z ของแขน 6 แกน บนหน้าจอสมอง
ในตอนท้ายของบทเรียนนี้คุณจะใช้ทักษะเหล่านั้นในกิจกรรมเพื่อย้ายแขน 6 แกนด้วยตนเองเพื่อค้นหาพิกัด (x, y, z) ของตำแหน่งไทล์เฉพาะ
การใช้หน้าจออุปกรณ์บนสมอง
ในหลักสูตร Introduction to the 6 - Axis Arm คุณได้เรียนรู้วิธีเคลื่อนย้าย 6 - Axis Arm ด้วยตนเองเพื่อรวบรวมพิกัดโดยใช้ Teach Pendant and Monitor สิ่งนี้เป็นไปได้เนื่องจากการเชื่อมต่อโดยตรงของแขน 6 แกนกับ VEXcode EXP ตอนนี้คุณกำลังใช้สมองกับแขน 6 แกนคุณจะใช้หน้าจอสมองเพื่อดูพิกัดในขณะที่ย้ายแขน 6 แกนด้วยตนเอง ในการทำเช่นนี้คุณจะใช้หน้าจออุปกรณ์บนสมอง
หน้าจออุปกรณ์คืออะไร
หน้าจออุปกรณ์ช่วยให้คุณสามารถดูข้อมูลสำหรับอุปกรณ์ที่เชื่อมต่อเช่นแขน 6 แกนหรือเซ็นเซอร์ เมื่อแขน 6 แกนเชื่อมต่อกันโดยตรงคุณสามารถดูข้อมูลเช่นพิกัด x, y, z กับจอภาพหรือจี้สอนได้ ตอนนี้สมองทำหน้าที่เป็นตัวควบคุมตรรกะที่ตั้งโปรแกรมได้ (PLC) ข้อมูลจากแขน 6 แกนจะต้องเข้าถึงได้จากสมอง ตลอดหลักสูตรนี้คุณจะใช้หน้าจออุปกรณ์เพื่อรวบรวมพิกัด 
การดูพิกัด x, y, z ด้วยหน้าจออุปกรณ์
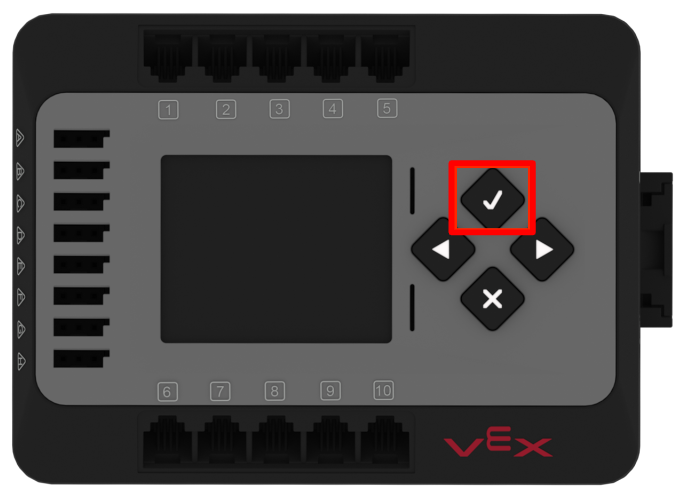
กด ปุ่ม ตรวจสอบเพื่อเปิดสมอง
ตรวจสอบให้แน่ใจว่าแขน 6 แกนและเสาสัญญาณเชื่อมต่อกับสมอง
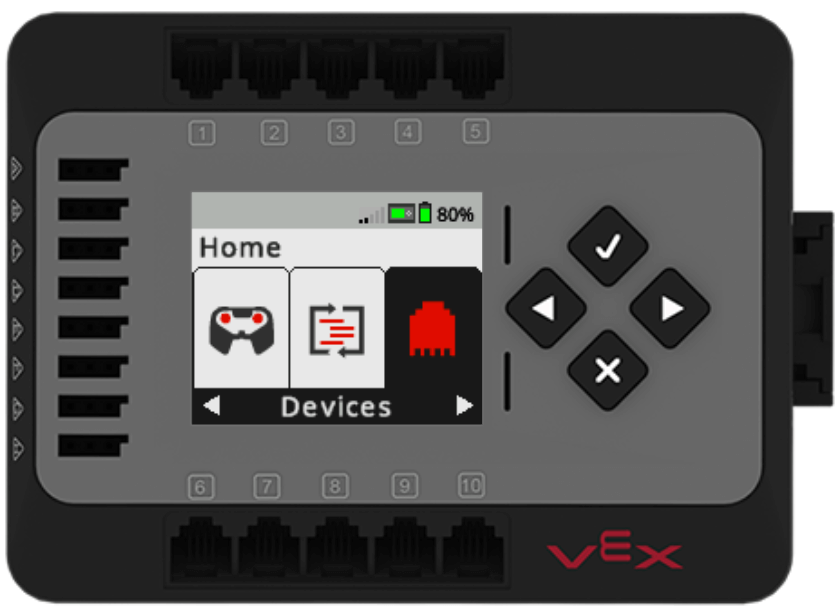
ใช้ลูกศร ขวา เพื่อไฮไลต์ตัว เลือก เมนูอุปกรณ์ กด ปุ่ม ตรวจสอบเพื่อเปิดหน้าจออุปกรณ์
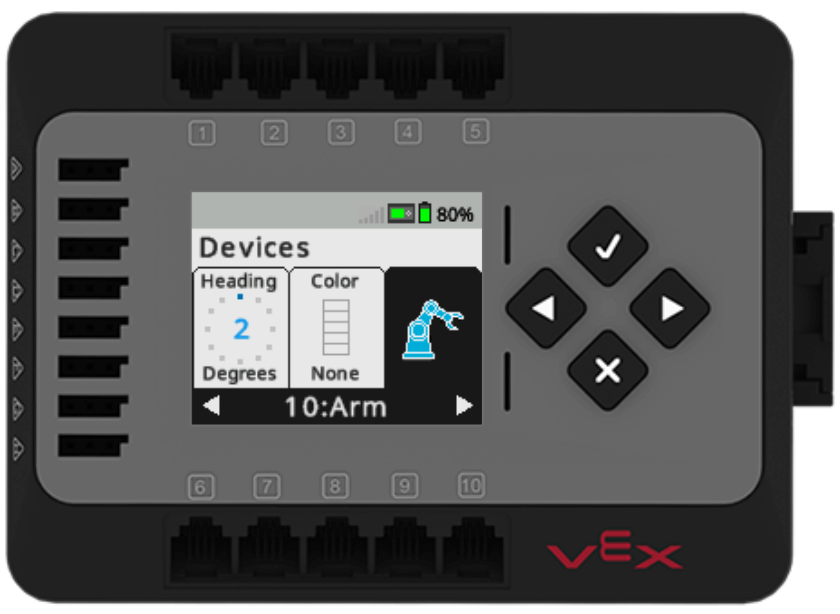
หน้าจออุปกรณ์จะแสดงข้อมูลเกี่ยวกับอุปกรณ์ทั้งหมดที่เชื่อมต่อกับสมอง ใช้ลูกศร ขวา เพื่อไฮไลต์ตัว เลือก เมนูแขน กด ปุ่ม ตรวจสอบเพื่อดู ข้อมูล แขน
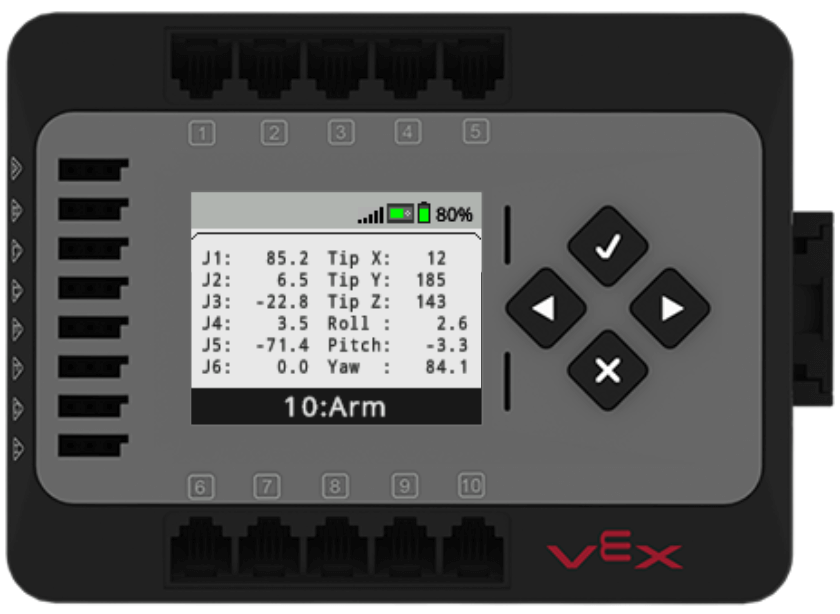
ตอนนี้คุณสามารถดูจุดข้อมูลเกี่ยวกับแขน 6 แกนได้แล้ว
การระบุพิกัด x, y และ z
หน้าจออุปกรณ์แสดงจุดข้อมูลจำนวนหนึ่งเกี่ยวกับการวางตำแหน่งของแขน 6 แกน ข้อมูลพิกัด x, y และ z อยู่ที่มุมขวาบนของหน้าจอและถูกติดป้ายกำกับเป็น X, Y และ Zดังที่แสดงในภาพนี้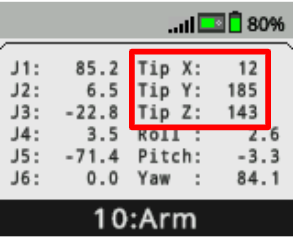
เมื่อคุณเลื่อนแขน 6 แกนข้อมูลที่แสดงบนหน้าจออุปกรณ์จะเปลี่ยนไปตามเวลาจริงดังที่แสดงในวิดีโอนี้
คุณสามารถใช้หน้าจออุปกรณ์เพื่อรวบรวมตำแหน่งพิกัดกับแขน 6 แกนและบันทึกลงในสมุดบันทึกวิศวกรรมของคุณเช่นเดียวกับที่คุณทำก่อนหน้านี้กับจอภาพเมื่อแขน 6 แกนเชื่อมต่อโดยตรงกับ VEXcode 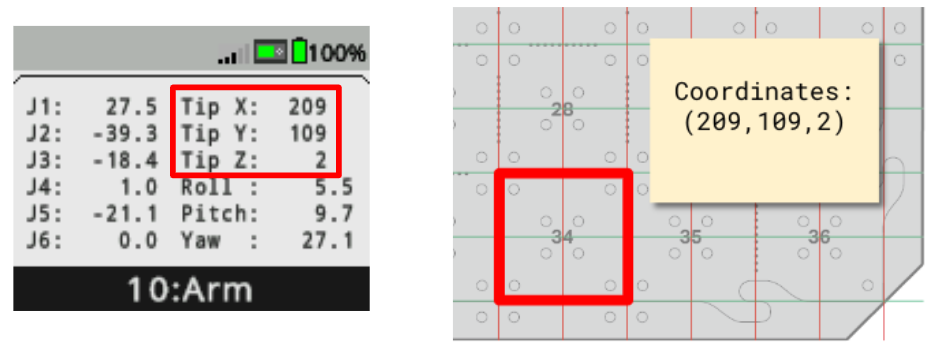
กิจกรรม
ตอนนี้คุณได้เรียนรู้วิธีใช้หน้าจออุปกรณ์บนสมองเพื่อดูตำแหน่ง x, y และ z ของแขน 6 แกนแล้วคุณสามารถฝึกทักษะเหล่านี้ได้โดยใช้ แขน 6 แกน CTE และหน้าจออุปกรณ์เพื่อค้นหาพิกัดของตำแหน่งไทล์เฉพาะ
- ดู ข้อมูล ARM บนหน้าจออุปกรณ์บนสมอง
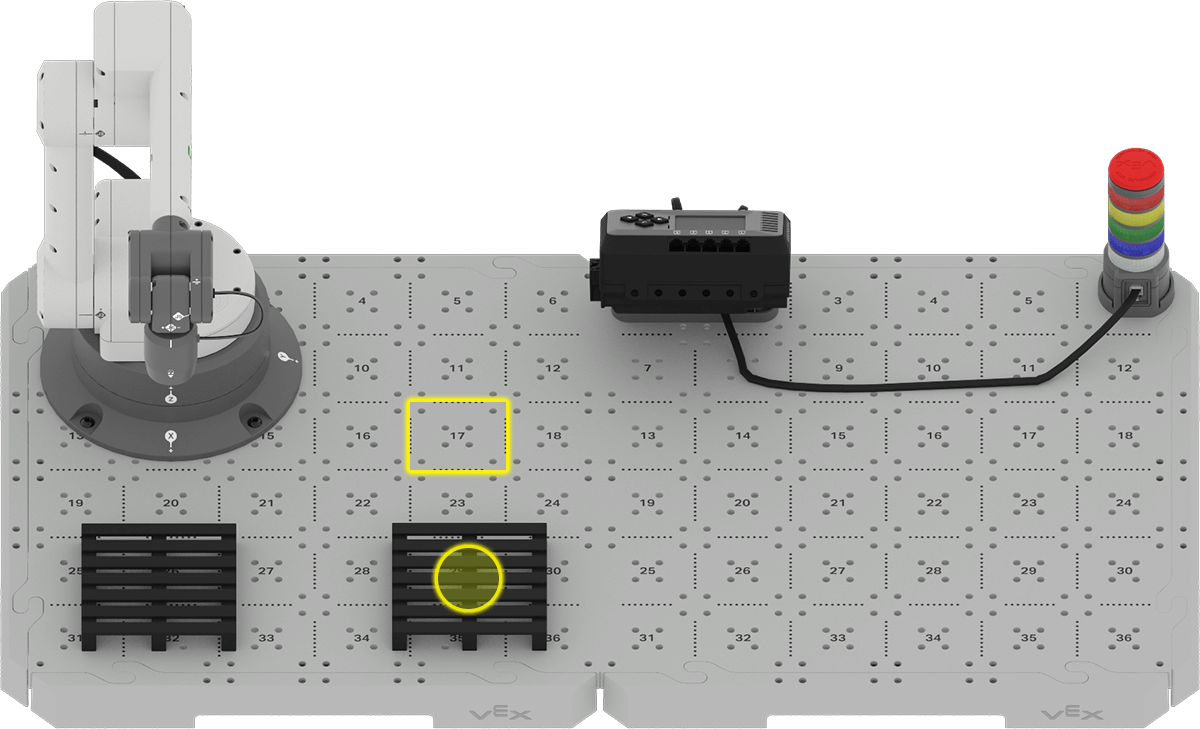
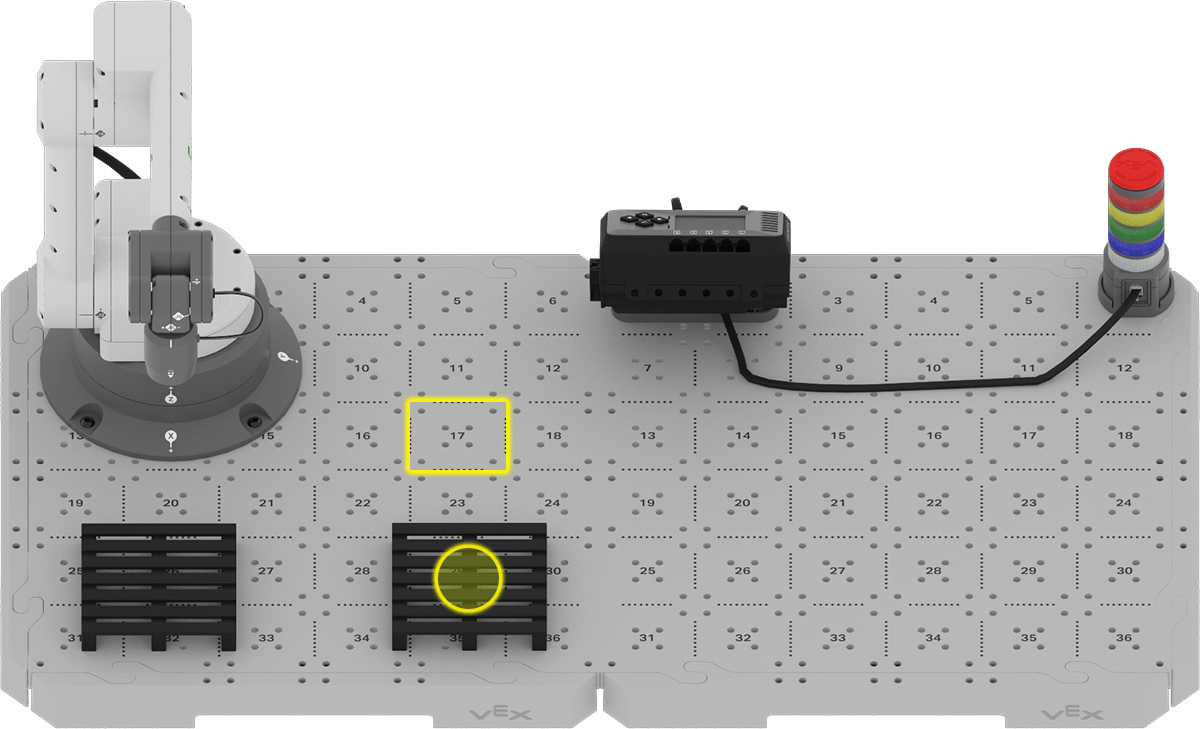
- เคลื่อนแขน 6 แกนด้วยตนเองและบันทึกพิกัด (x, y, z) ของตำแหน่งไทล์ต่อไปนี้ (ตามที่แสดงในภาพด้านบน) ในสมุดบันทึกวิศวกรรมของคุณ:
- ตำแหน่งกระเบื้อง 17
- กึ่งกลางของพาเลท
- ด้านบนของดิสก์บนตำแหน่งไทล์ 17
- ด้านบนของดิสก์ที่อยู่ตรงกลางของพาเลท
- พิกัด คล้าย กันอย่างไร? ค่าใดแตกต่างกันและเพราะเหตุใด? บันทึกคำตอบของคุณลงในสมุดบันทึกวิศวกรรมของคุณ
ตรวจสอบความเข้าใจของคุณ
ก่อนเริ่มบทเรียนต่อไปตรวจสอบให้แน่ใจว่าท่านเข้าใจแนวคิดในบทเรียนนี้โดยตอบคำถามในเอกสารด้านล่างในสมุดบันทึกวิศวกรรมของท่าน
ตรวจสอบคำถามเกี่ยวกับความเข้าใจของ คุณ > ( Google Doc /.docx /.pdf)
เลือก ถัด > ไปเพื่อใช้พิกัดที่คุณรวบรวมไว้ในโครงการเพื่อย้ายดิสก์