
Uso del sensor de visión: basado en bloques
![]() Caja de herramientas para maestros
: el propósito de esta actividad
Caja de herramientas para maestros
: el propósito de esta actividad
El uso eficaz del sensor de visión requiere que los estudiantes puedan configurarlo y ajustarlo en función del entorno en el que se encuentre. En la siguiente actividad, los estudiantes aprenderán a hacer ambas cosas.
Para obtener más información sobre la programación del sensor de visión con bloques de detección, visite la información de ayuda dentro de VEXcode V5.
El siguiente es un resumen de lo que sus estudiantes harán en esta actividad:
-
Abra el proyecto de ejemplo Detección de objetos (Visión).
-
Vea el vídeo tutorial Configuración de un sensor de visión.
-
Configure el sensor de visión.
-
Ejecute el proyecto de ejemplo Detección de objetos (Visión).
-
Discuta y reflexione.
-
Vea el vídeo tutorial Sintonización del sensor de visión.
-
Ajuste el sensor de visión.
![]() Consejos para profesores
Consejos para profesores
Si esta es la primera vez que el estudiante usa VEXcode V5, también puede ver los tutoriales en la barra de herramientas para aprender otras habilidades básicas.

Obtenga el hardware necesario, su portátil de ingeniería y abra VEXcode V5.
| Cantidad | Materiales necesarios |
|---|---|
| 1 |
Kit de inicio VEX V5 Classroom |
| 1 |
VEXcode V5 (última versión, Windows, macOS, Chromebook) |
| 1 |
Cuaderno de ingeniería |
| 1 |
Configuración de un sensor de visión (tutorial) |
| 1 |
Ajuste del sensor de visión (tutorial) |
| 1 |
Proyecto de ejemplo Detección de objetos (Visión) |
Esta actividad le dará las herramientas para usar el sensor de visión.
Puede utilizar la información de ayuda dentro de VEXcode V5 para obtener información sobre los bloques. Para obtener orientación sobre el uso de la función de ayuda, consulte el tutorial Uso de la ayuda.

Paso 1: Abra un proyecto de ejemplo.
VEXcode V5 contiene muchos proyectos de ejemplo diferentes. Usarás uno de ellos en esta exploración. Para obtener ayuda y consejos sobre el uso de proyectos de ejemplo, consulta el tutorial Uso de ejemplos y plantillas.
A continuación, abra el proyecto de ejemplo Detección de objetos (Visión) siguiendo estos pasos:
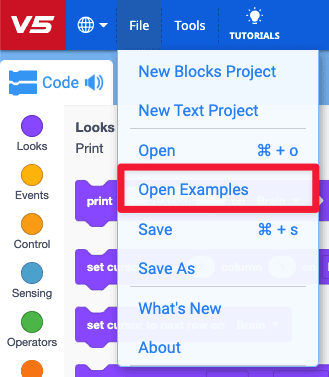
- Abra el menú Archivo.
- Selecciona Abrir ejemplos.
- Utilice la barra de filtro en la parte superior de la aplicación y seleccione "Detección".

Seleccione y abra el proyecto de ejemplo Detección de objetos (Visión).
Guarde su proyecto como Detección de objetos.
- Compruebe que el nombre del proyecto Detección de objetos esté ahora en la ventana en el centro de la barra de herramientas.

- Para obtener ayuda adicional, vea el video tutorial Use Example Projects and Templates (Usar proyectos y plantillas de ejemplo).
![]() Consejos para profesores
Consejos para profesores
-
Asegúrese de que los estudiantes hayan seleccionado Abrir ejemplos en el menú Archivo.
-
Asegúrese de que los estudiantes hayan seleccionado el proyecto de ejemplo de detección de objetos (visión). Puede señalar a los estudiantes que hay varias selecciones para elegir en la página Abrir ejemplos. Recuerde a los estudiantes que pueden consultar el tutorial Uso de ejemplos y plantillas en cualquier momento.
-
Puede pedir a los estudiantes que añadan sus iniciales o el nombre de su grupo al nombre del proyecto. Esto ayudará a diferenciar los programas si les pides a los estudiantes que los envíen.
-
Dado que VEXcode V5 tiene autoguardado, no es necesario volver a guardar el proyecto después de que se haya guardado por primera vez.
-
Si los estudiantes necesitan ayuda para guardar, diríjalos al video tutorial Nombrar y guardar su proyecto.
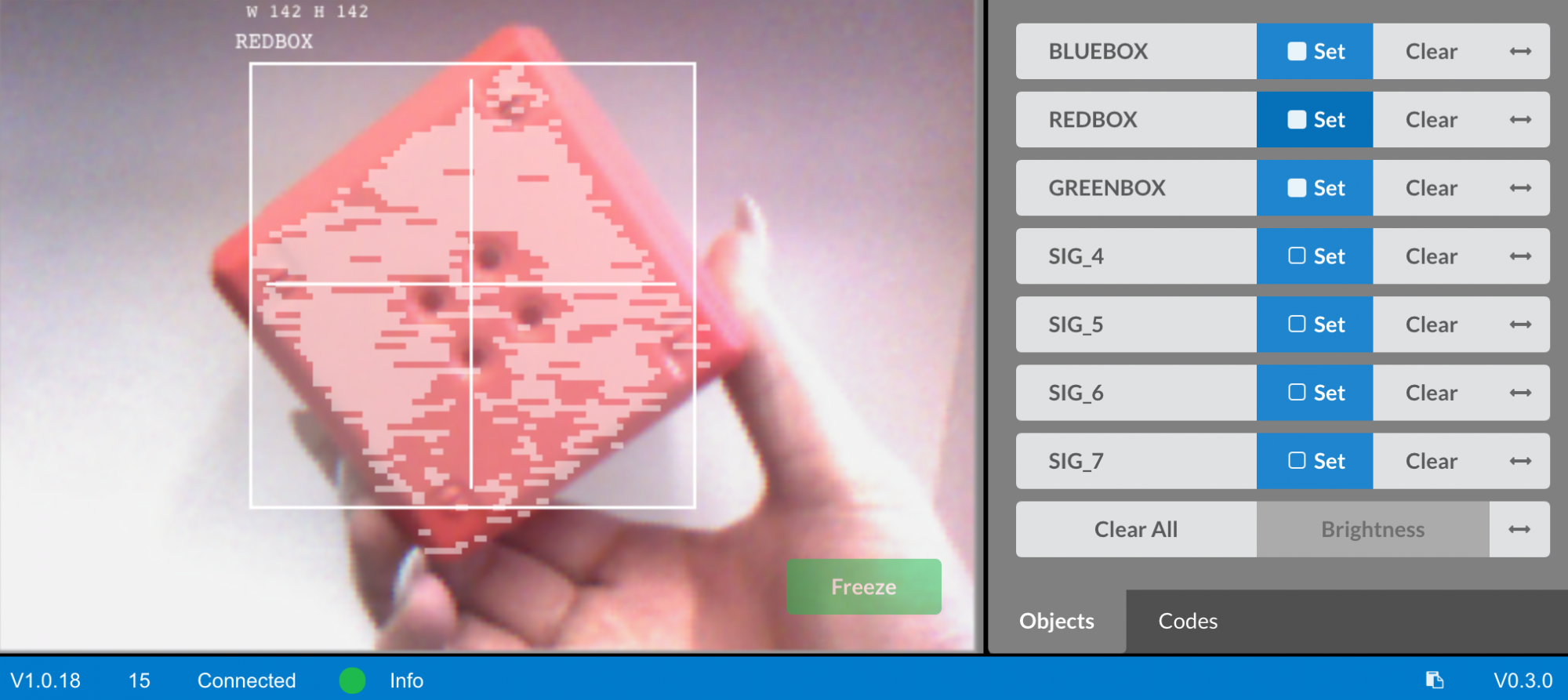
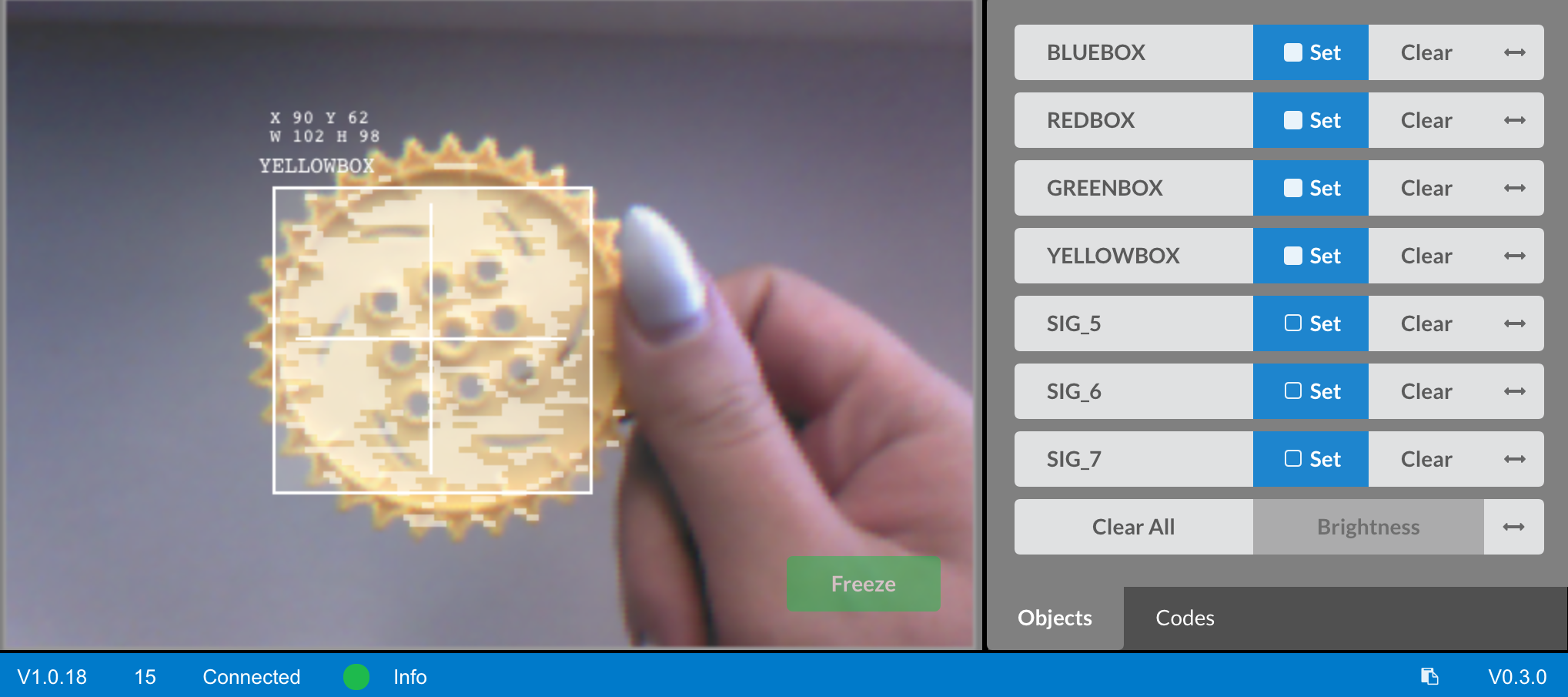
Paso 2: Configuración y uso del sensor de visión
- Comience viendo el vídeo tutorial Configuración de un sensor de visión.
- A continuación, configure el sensor de visión para tres objetos de color: rojo, verde y azul.
Abra el proyecto de ejemplo Detección de objetos (Visión) previamente guardado.
¿Cómo se utiliza el sensor de visión en este proyecto? Predecir lo que sucederá cuando se ejecute el proyecto y anotar las predicciones en su cuaderno de ingeniería.
Descargue y ejecute el proyecto. Coloque objetos de diferentes colores frente al sensor de visión y observe el comportamiento del robot. Registre en su cuaderno de ingeniería cómo su predicción fue diferente o correcta en comparación con lo que realmente observó en el proyecto.
Para obtener ayuda adicional, vea el vídeo tutorial Descargar y ejecutar un proyecto.
![]() Consejos para profesores
Consejos para profesores
Los objetos de tres colores no tienen que ser cubos, pueden ser cualquier objeto verde, rojo y azul relativamente pequeño.
![]() Motivar la discusión
-
Respuestas
Motivar la discusión
-
Respuestas
Facilite una discusión en el aula para que los estudiantes compartan lo que predijeron que este proyecto hará en su cuaderno de ingeniería y también reflexionen sobre cómo configurar el sensor de visión.
Facilite la discusión haciendo las siguientes preguntas:
-
¿Cuáles son los pasos para configurar el sensor de visión?
-
¿Qué hace el <Object exists> bloque?
-
¿Qué hace el bloque [If then else]?
-
¿Qué pasaría con la forma en que el sensor de visión detecta objetos si cambiamos de habitación?
Las respuestas variarán:
-
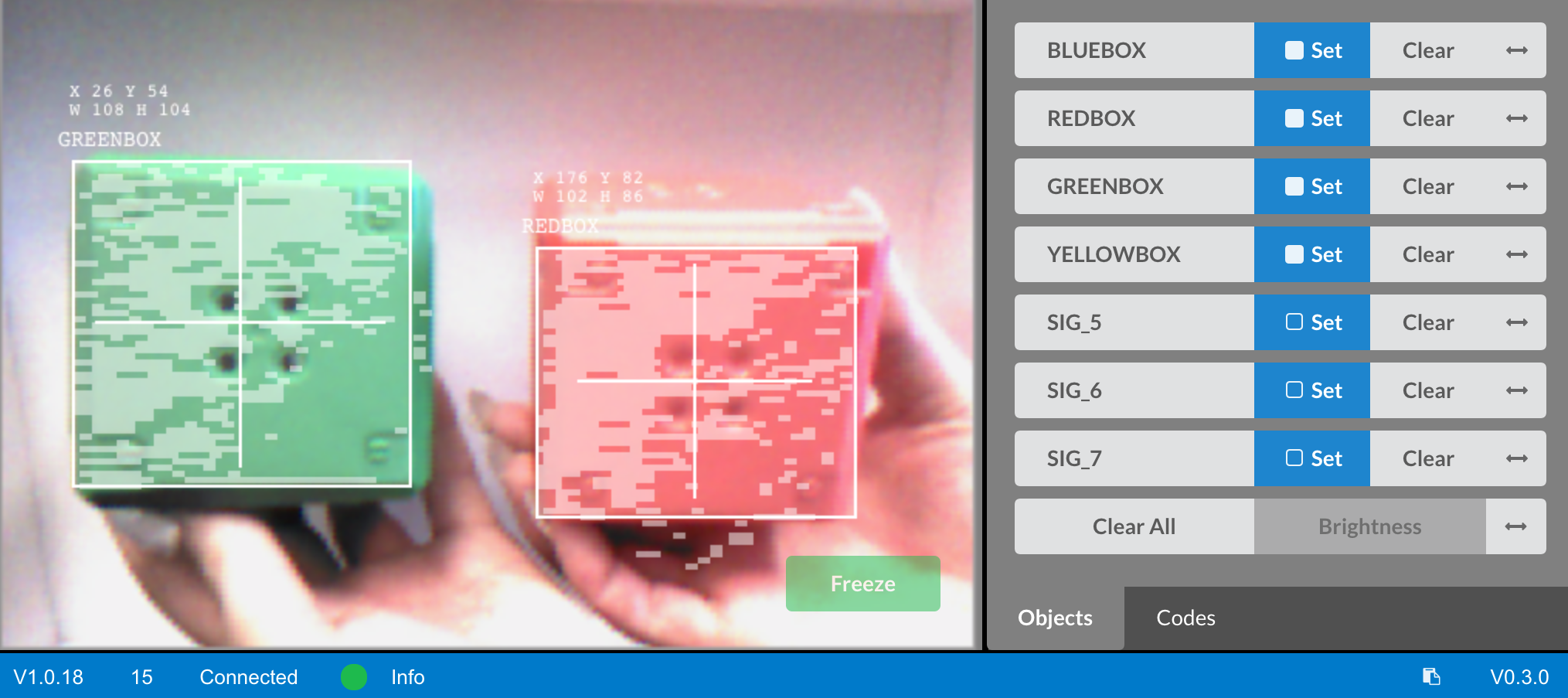
Los estudiantes deben tener en cuenta que el nombre del objeto tendrá que ser decidido. El objeto debe colocarse en el marco del sensor de visión y calmarse con el botón "Congelar". El color se seleccionará y configurará utilizando el botón "Establecer". Los estudiantes deben describir los pasos enumerados en este artículo, así como los pasos enumerados en el video tutorial Configuración de un sensor de visión.
-
El <Object exists> bloque informa si el sensor de visión detecta un objeto configurado. Puede encontrar más información sobre cómo usar este bloque en la información de Ayuda.
-
El bloque [If then else] ejecuta los bloques dentro de la primera o segunda parte del [If then else] en función del valor booleano informado. Puede encontrar más información sobre cómo usar este bloque en la información de Ayuda.
-
Si se le pidiera al sensor de visión que detectara objetos en un entorno diferente, la iluminación podría cambiar y los colores de los objetos podrían verse diferentes. Esto puede dificultar que el sensor de visión detecte objetos.
![]() Caja de herramientas para maestros
:
los bloques de transmisión
Caja de herramientas para maestros
:
los bloques de transmisión
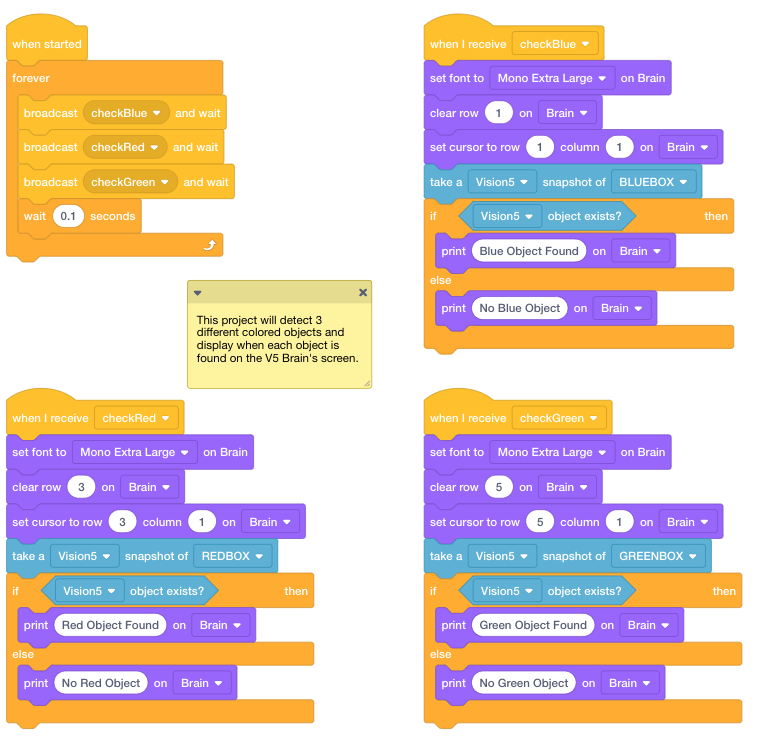
En el proyecto de ejemplo Detección de objetos (Visión), el proyecto se organiza utilizando los bloques [Difusión y espera]. El proyecto podría modificarse para eliminar los bloques [Difusión y espera] y colocar todas las pilas dentro del bloque [Siempre]. Ambos proyectos permitirían al robot realizar las mismas acciones. El uso de los bloques [Difusión y espera] permite una mejor organización de los bloques y el flujo de programación.
Para obtener más información sobre los bloques de transmisión, visite la información de Ayuda. Consulte el tutorial Uso de la Ayuda dentro de VEXcode V5 según sea necesario.
![]() Amplíe su aprendizaje
:
configure más objetos
Amplíe su aprendizaje
:
configure más objetos
Elija otros dos objetos de color para configurar, posiblemente blanco, morado, amarillo, etc.
Si los estudiantes necesitan ayuda con la configuración, refiéralos a la información de Ayuda o al tutorial.
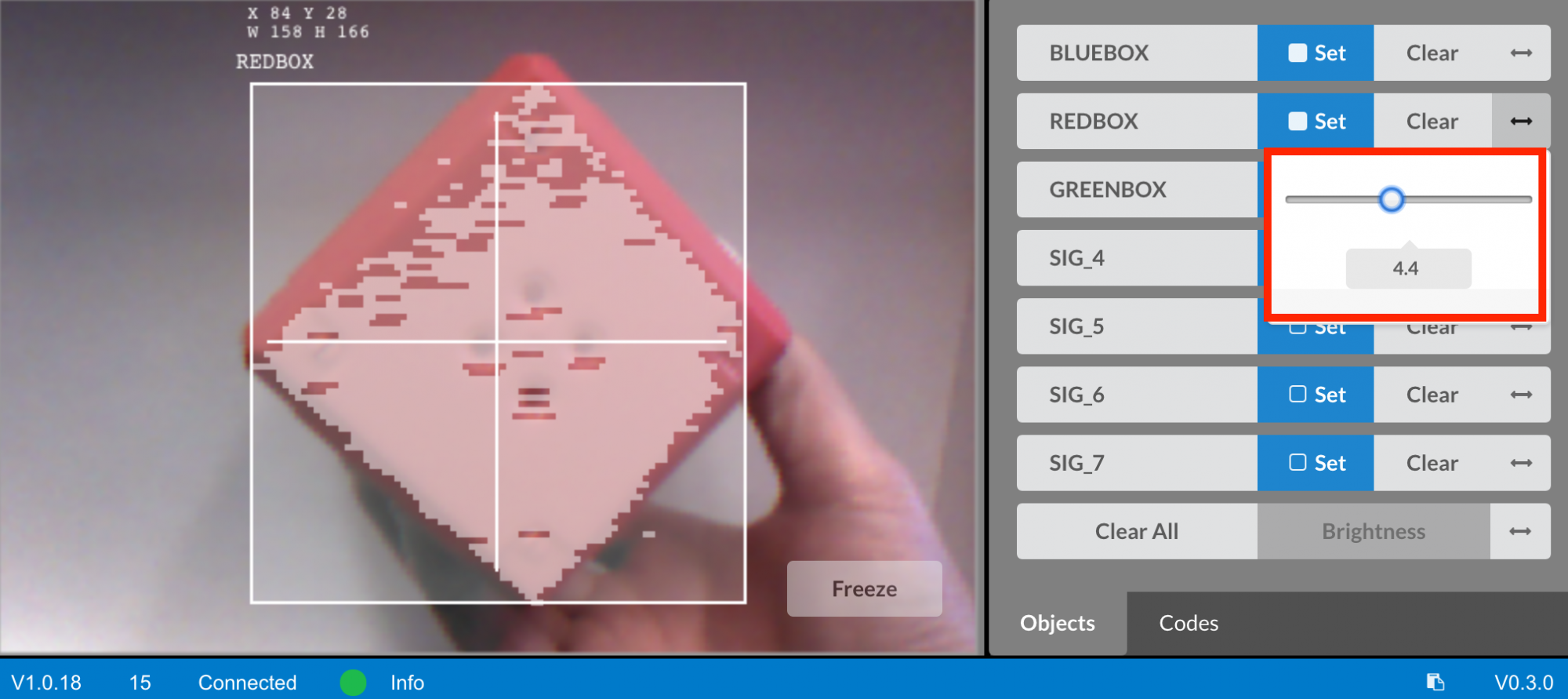
Paso 3: ajuste del sensor de visión
Muchas veces un objeto está configurado para ser reconocido por el sensor de visión en un entorno, por ejemplo, en un aula. Cuando el sensor de visión se lleva a un entorno diferente, como un entorno de competición, es posible que el sensor de visión no reconozca el objeto. Esto a menudo se debe a un cambio en la iluminación después de que el sensor de visión ya se haya configurado. Para resolver este problema, es posible que tenga que ajustar su sensor de visión.
- Comience viendo el vídeo tutorial Sintonizar el sensor de visión.
- A continuación, sintonice el sensor de visión para los tres objetos de color: rojo, verde y azul.
Abra el proyecto de ejemplo Detección de objetos (Visión) previamente guardado.
¿Cómo afectará el ajuste del sensor de visión a su capacidad para detectar objetos? Lleva el Clawbot a otra parte de la habitación con más o menos luz.

Descargue y ejecute el proyecto. Coloque objetos de diferentes colores frente al sensor de visión y observe el comportamiento del robot. Documente en su cuaderno de ingeniería qué tan bien el sensor de visión detecta objetos. ¿Es necesario ajustar el sensor de visión después de cambiar de ubicación?
Para obtener ayuda adicional, vea el vídeo tutorial Descargar y ejecutar un proyecto.
Ajuste el sensor de visión según sea necesario. Pruebe el sensor de visión después de que se haya ajustado para determinar si puede detectar mejor los objetos y hacer los ajustes necesarios.
![]() Motivar la discusión
-
Reflexionar sobre la actividad
Motivar la discusión
-
Reflexionar sobre la actividad
P: ¿El sensor de visión detectó objetos como esperaba?
R: Las respuestas variarán; sin embargo, el objetivo de esta pregunta es promover el pensamiento cognitivo. Los estudiantes deben tener en cuenta que la capacidad del sensor de visión para detectar objetos puede cambiar dependiendo del entorno y la luz.
P: ¿Por qué es importante poder ajustar el sensor de visión según sea necesario?
R: Si bien las respuestas pueden variar, una respuesta común debe ser que si un robot usa un sensor de visión y es llevado a una competencia o incluso utilizado en un juego o desafío, el rendimiento del robot dependerá de la precisión del sensor de visión. Afinarlo es importante para la precisión.
![]() Amplíe su aprendizaje
-
Múltiples objetos
Amplíe su aprendizaje
-
Múltiples objetos
Pida a los estudiantes que ejecuten el proyecto Detección de objetos y coloquen más de uno de los objetos configurados frente al sensor de visión. ¿Qué pasa? Pídales que documenten sus hallazgos en su cuaderno de ingeniería.
Ahora, pida a los estudiantes que coloquen un objeto configurado y un objeto desconocido o no configurado frente al sensor de visión. ¿Qué pasa? Pídales que documenten sus hallazgos en su cuaderno de ingeniería.
Pregunte a los estudiantes antes de probarlo, ¿qué pasaría si colocaran tres objetos configurados frente al sensor de visión? Pida a los estudiantes que escriban sus predicciones antes de ponerlas a prueba. Pídales que registren sus observaciones después de probarlo.
Facilite una discusión sobre lo que los estudiantes predijeron y observaron.
Facilite la discusión preguntando:
- ¿Cuáles eran las diferencias entre uno, dos y tres objetos?
- ¿Ajustaría el proyecto de alguna manera para reconocer varios objetos?