
Utilização do Sensor de Visão - Baseado em Blocos
![]() Caixa de ferramentas do professor
-
O objetivo desta atividade
Caixa de ferramentas do professor
-
O objetivo desta atividade
A utilização eficaz do Sensor de Visão exige que os alunos sejam capazes de o configurar e ajustar consoante o ambiente em que se encontra. Na atividade seguinte, os alunos vão aprender como fazer as duas coisas.
Para obter mais informações sobre a programação do Sensor de Visão com blocos de deteção, visite as informações de ajuda no VEXcode V5.
A seguir, é apresentado um esboço do que os seus alunos farão nesta atividade:
-
Abra o projeto de exemplo Detetar Objetos (Vision).
-
Veja o vídeo tutorial Configurar um sensor de visão .
-
Configure o sensor de visão.
-
Execute o projeto de exemplo Detetar Objetos (Vision).
-
Discuta e reflita.
-
Veja o vídeo tutorial Ajustar o Sensor de Visão .
-
Sintonize o sensor de visão.
![]() Dicas para professores
Dicas para professores
Se esta for a primeira vez que o aluno utiliza o VEXcode V5, também poderá ver os Tutoriais na barra de ferramentas para aprender outras competências básicas.

Obtenha o hardware necessário, o seu portátil de engenharia e abra o VEXcode V5.
| Quantidade | Materiais necessários |
|---|---|
| 1 |
Kit de iniciação para sala de aula VEX V5 |
| 1 |
VEXcode V5 (versão mais recente, Windows, macOS, Chromebook) |
| 1 |
Caderno de Engenharia |
| 1 |
Configurar um sensor de visão (tutorial) |
| 1 |
Ajustar o sensor de visão (tutorial) |
| 1 |
Projeto de exemplo de deteção de objetos (Visão) |
Esta atividade dar-lhe-á as ferramentas para utilizar o Sensor de Visão.
Pode utilizar as informações de Ajuda dentro do VEXcode V5 para aprender sobre os blocos. Para obter orientação sobre como utilizar a funcionalidade Help , consulte o tutorial Utilizar a Ajuda.

Passo 1: Abra um projeto de exemplo.
O VEXcode V5 contém muitos exemplos de projetos diferentes. Utilizará um deles nesta exploração. Para obter ajuda e dicas sobre como utilizar projetos de exemplo, consulte o tutorial Utilizar exemplos e modelos.
Em seguida, abra o projeto de exemplo Detecting Objects (Vision) concluindo os seguintes passos:
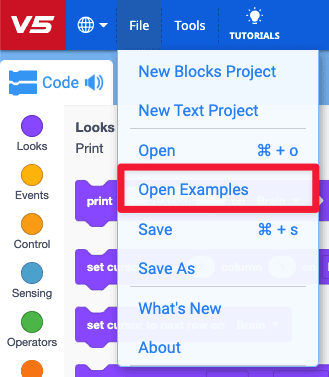
- Abra o menu Ficheiro.
- Selecione Abrir Exemplos.
- Utilize a barra de filtros na parte superior da aplicação e selecione “Sensing”.

Selecione e abra o projeto de exemplo Detecting Objects (Vision) .
Guarde o seu projeto como Detetar Objetos.
- Verifique se o nome do projecto Detecting Objects se encontra agora na janela no centro da barra de ferramentas.

- Para obter ajuda adicional, veja o vídeo tutorial Utilizar exemplos de projetos e modelos.
![]() Dicas para professores
Dicas para professores
-
Certifique-se de que os alunos selecionaram Exemplos abertos no menu Ficheiro.
-
Certifique-se de que os alunos selecionaram o projeto Detetar Objetos (Visão) Exemplo. Pode mostrar aos alunos que existem diversas opções à escolha na página Exemplos Abertos . Lembre os alunos que podem consultar o tutorial Utilizar exemplos e modelos a qualquer momento.
-
Pode pedir aos alunos que adicionem as suas iniciais ou o nome do grupo ao nome do projeto. Isto ajudará a diferenciar os programas se pedir aos alunos que os enviem.
-
Como o VEXcode V5 tem auto-save, não há necessidade de guardar o projeto novamente após este ter sido guardado pela primeira vez.
-
Se os alunos precisarem de ajuda para guardar, encaminhe-os para o vídeo tutorial Nomear e guardar o seu projeto.
Passo 2: configurar e utilizar o sensor de visão
- Comece por ver o vídeo tutorial Configurar um sensor de visão.
- A seguir, configure o Vision Sensor para três objetos coloridos: vermelho, verde e azul.
Abra o projeto de exemplo de deteção de objetos (Vision) guardado anteriormente.
Como está a ser utilizado o Sensor de Visão neste projeto? Preveja o que acontecerá quando o projeto for executado e anote as previsões no seu caderno de engenharia.
Descarregue e execute o projeto. Coloque objetos de cores diferentes em frente ao Sensor de Visão e observe o comportamento do robô. Registe no seu caderno de engenharia como a sua previsão foi diferente ou correta em comparação com o que realmente observou no projeto.
Para obter ajuda adicional, veja o vídeo tutorial Descarregar e executar um projeto.
![]() Dicas para professores
Dicas para professores
Os três objetos coloridos não têm de ser cubos, podem ser qualquer objeto verde, vermelho e azul relativamente pequeno.
![]() Motivar a discussão
-
respostas
Motivar a discussão
-
respostas
Promova uma discussão em sala de aula para que os alunos partilhem o que previram que este projeto fará nos seus cadernos de engenharia e reflitam também sobre como configurar o Sensor de Visão.
Facilite a discussão colocando as seguintes questões:
-
Quais são os passos para configurar o Sensor de Visão?
-
O que faz o bloco <Object exists>?
-
O que faz o bloco [If then else]?
-
O que aconteceria à forma como o Sensor de Visão deteta objetos se mudássemos de quarto?
As respostas irão variar:
-
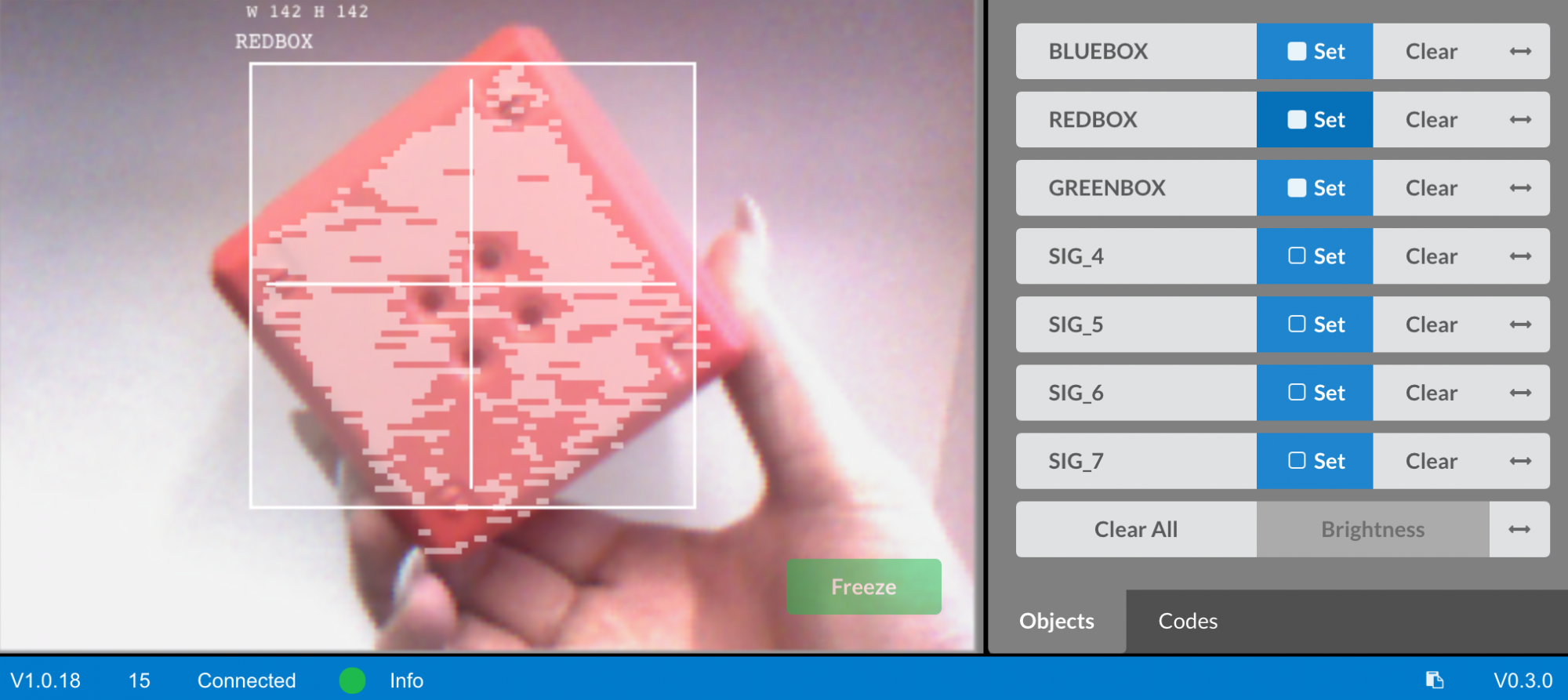
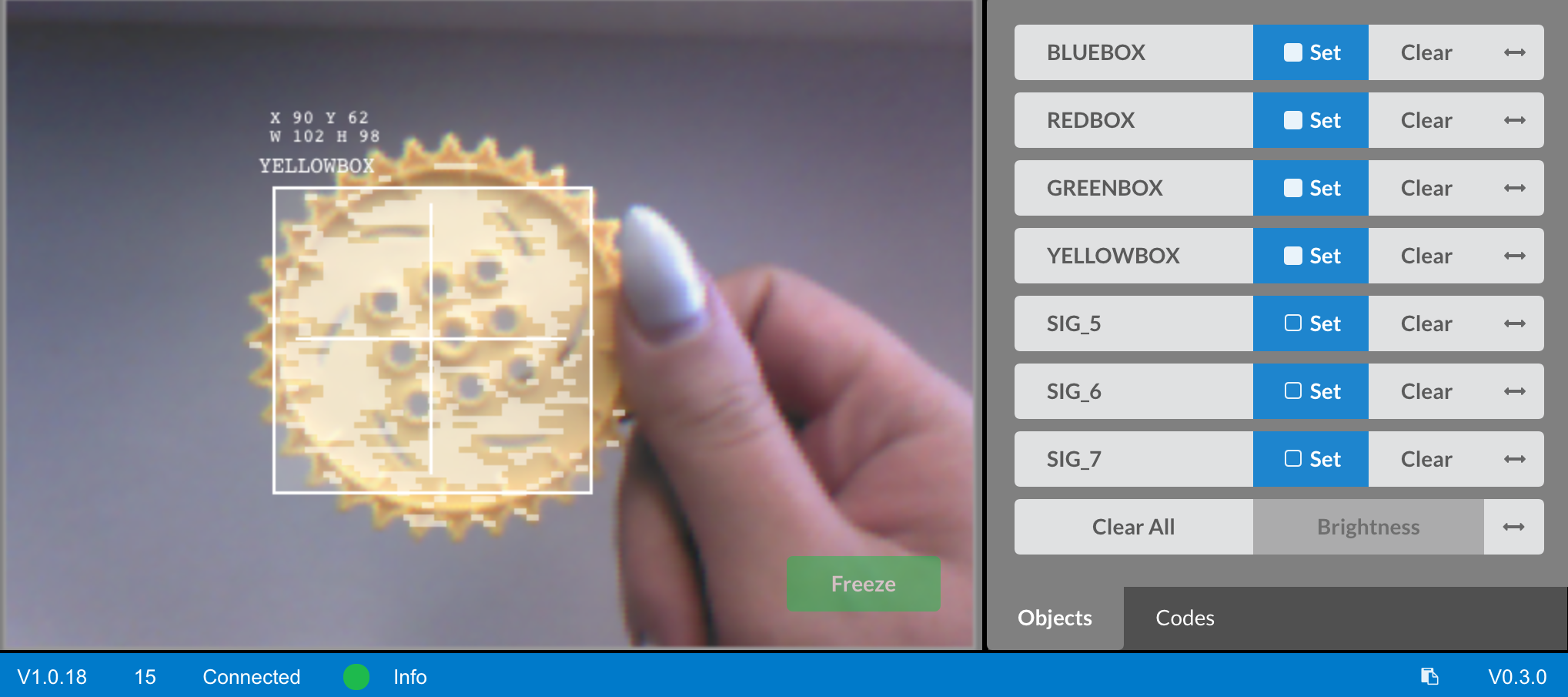
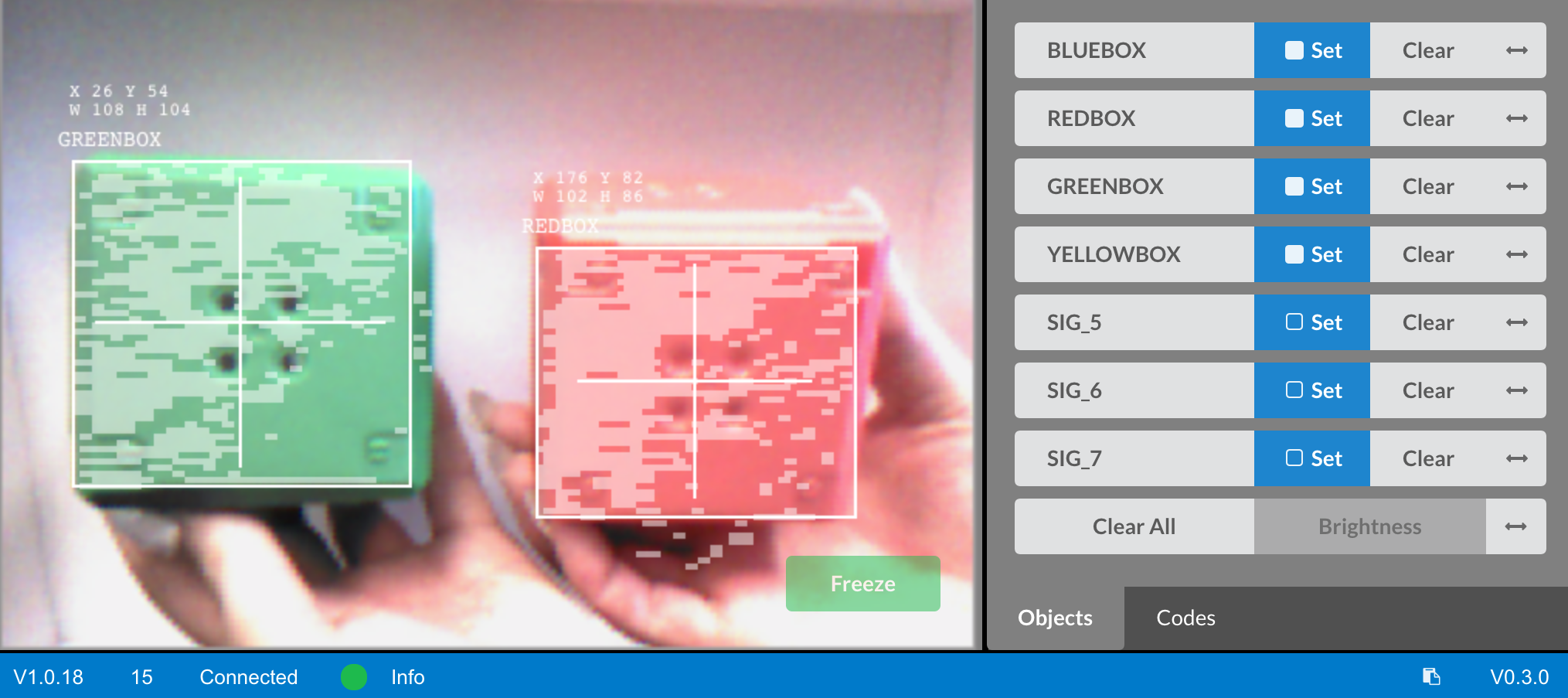
Os alunos devem observar que o nome do objeto terá de ser decidido. O objeto deve ser colocado na moldura do Sensor de Visão e imobilizado através do botão “Congelar”. A cor será então selecionada e configurada através do botão "Definir". Os alunos devem descrever os passos listados em deste artigo bem como os passos listados no vídeo tutorial Configurar um Sensor de Visão.
-
O bloco <Object exists> informa se o Sensor de Visão deteta um objeto configurado. Mais informações sobre como utilizar este bloco podem ser encontradas nas informações Ajuda .
-
O bloco [If then else] executa os blocos dentro da primeira ou segunda parte do [If then else] com base no valor booleano reportado. Mais informações sobre como utilizar este bloco podem ser encontradas nas informações da Ajuda.
-
Se o Sensor de Visão fosse solicitado para detetar objetos num ambiente diferente, a iluminação poderia mudar e as cores dos objetos poderiam parecer diferentes. Isto pode dificultar a deteção de objetos pelo Sensor de Visão.
![]() Caixa de ferramentas do professor
-
Os blocos de transmissão
Caixa de ferramentas do professor
-
Os blocos de transmissão
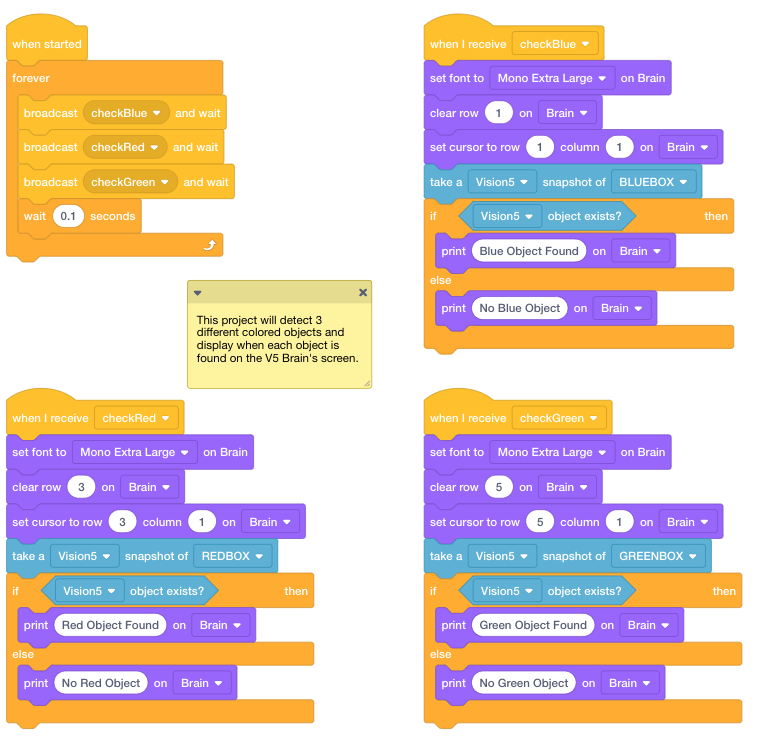
No projeto de exemplo Detecting Objects (Vision), o projeto é organizado utilizando os blocos [Broadcast and wait]. O projeto poderia ser alterado para remover os blocos [Broadcast and wait] e colocar todas as pilhas dentro do bloco [Forever]. Ambos os projetos permitiriam que o robô realizasse as mesmas ações. A utilização dos blocos [Broadcast and wait] permite uma melhor organização dos blocos e fluxo de programação.
Para mais informações sobre os blocos de transmissão, visite as informações do Help . Consulte o tutorial Utilizar a Ajuda no VEXcode V5, conforme necessário.
![]() Amplie a sua aprendizagem
-
Configure mais objetos
Amplie a sua aprendizagem
-
Configure mais objetos
Escolha outros dois objetos coloridos para configurar, possivelmente branco, roxo, amarelo, etc...
Se os alunos precisarem de ajuda com configurar, remeta-os para a informação ou tutorial do Ajuda .
Passo 3: Ajustando o Sensor de Visão
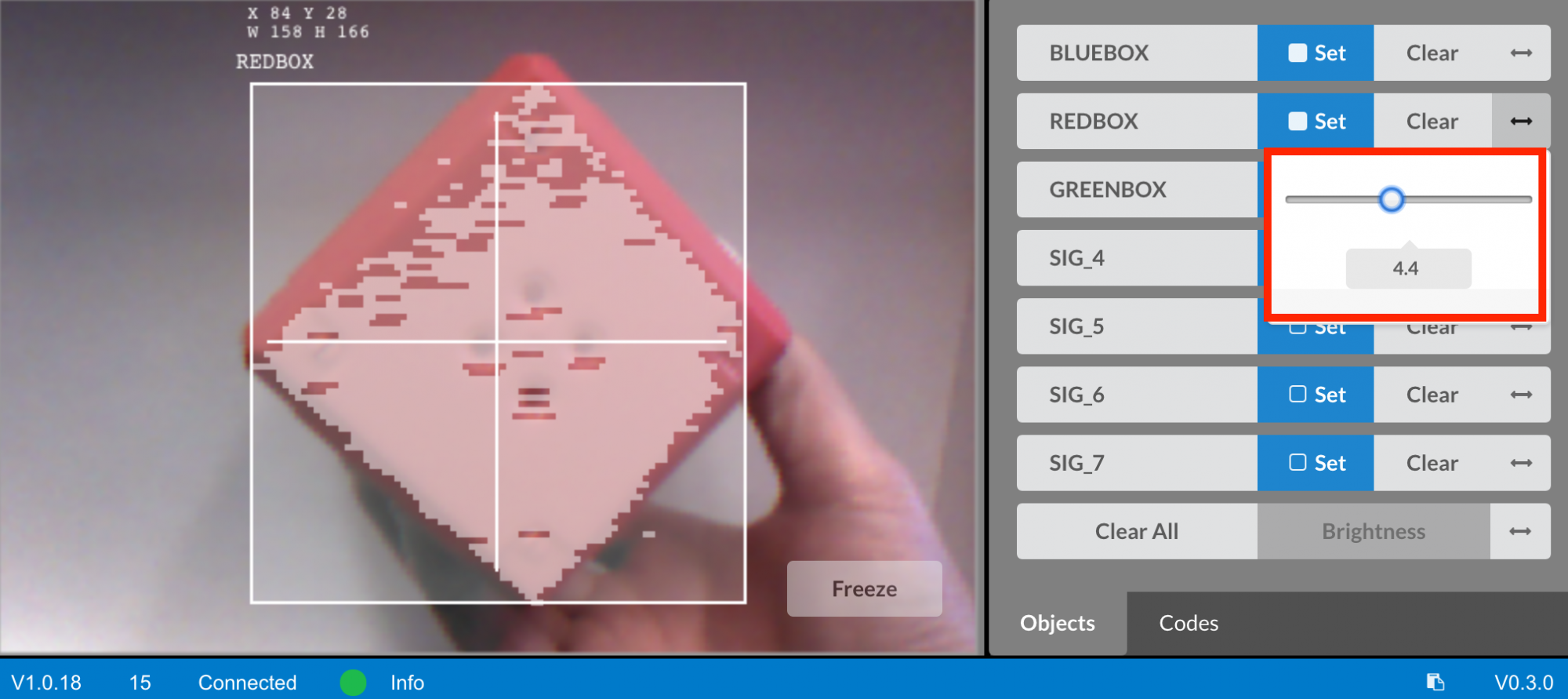
Muitas vezes um objeto é configurado para ser reconhecido pelo Sensor de Visão num ambiente, por exemplo, numa sala de aula. Quando o Sensor de Visão for levado para um ambiente diferente, como por exemplo um ambiente de competição, o objeto poderá não ser reconhecido pelo Sensor de Visão. Isto acontece muitas vezes devido a uma alteração na iluminação depois de o Sensor de Visão já ter sido configurado. Para resolver este problema, poderá ser necessário ajustar o seu sensor de visão.
- Comece por ver o vídeo tutorial Como ajustar o sensor de visão.
- A seguir, Ajuste o Sensor de Visão para os três objectos coloridos: vermelho, verde e azul.
Abra o projeto de exemplo de deteção de objetos (Vision) guardado anteriormente.
Como é que o ajuste do Sensor de Visão afetará a capacidade de deteção de objetos? Leva o Clawbot para uma parte diferente da sala com mais ou menos luz.

Descarregue e execute o projeto. Coloque objetos de cores diferentes em frente ao Sensor de Visão e observe o comportamento do robô. Documente no seu caderno de engenharia o quão bem o Sensor de Visão deteta objetos. O Sensor de Visão necessita de ser ajustado depois de mudar de local?
Para obter ajuda adicional, veja o vídeo tutorial Descarregar e executar um projeto.
Ajuste o Sensor de Visão conforme necessário. Teste o sensor de visão depois de ajustado para determinar se consegue detetar melhor os objetos e fazer os ajustes necessários.
![]() Motivar a Discussão
-
Refletir sobre a Atividade
Motivar a Discussão
-
Refletir sobre a Atividade
P: O Sensor de Visão detetou os objetos como esperava?
A: As respostas variam; no entanto, o objetivo desta questão é promover o pensamento cognitivo. Os alunos devem notar que a capacidade do Sensor de Visão para detetar objetos pode mudar dependendo do ambiente e da luz.
P: Porque é importante poder ajustar o Sensor de Visão conforme necessário?
A: Embora as respostas possam variar, uma resposta comum deveria ser que se um robô utilizar um Sensor de Visão e for levado para uma competição ou mesmo utilizado num jogo ou desafio, o desempenho do robô dependerá da precisão do Sensor de Visão. Ajustá-lo é importante para a precisão.
![]() Amplie a sua aprendizagem
-
Vários objetos
Amplie a sua aprendizagem
-
Vários objetos
Peça aos alunos para executarem o projeto Detetar Objetos e para colocarem mais do que um dos objetos configurados em frente ao Sensor de Visão. O que acontece? Peça-lhes que documentem as suas descobertas no seu caderno de engenharia.
Peça agora aos alunos que coloquem um objeto configurado e um objeto desconhecido ou não configurado em frente ao Sensor de Visão. O que acontece? Peça-lhes que documentem as suas descobertas no seu caderno de engenharia.
Pergunte aos alunos antes de o testar, o que aconteceria se colocassem três objetos configurados em frente ao Sensor de Visão? Peça aos alunos que anotem as suas previsões antes de o testarem. Peça-lhes que registem as suas observações após testá-lo.
Promova uma discussão sobre o que os alunos previram e observaram.
Facilite a discussão perguntando:
- Quais foram as diferenças entre um, dois e três objetos?
- Ajustaria o projeto de alguma forma para reconhecer vários objetos?