
الدرس 3: انعطف يسارًا للوصول إلى الحرف "ب".
لمعلوماتك
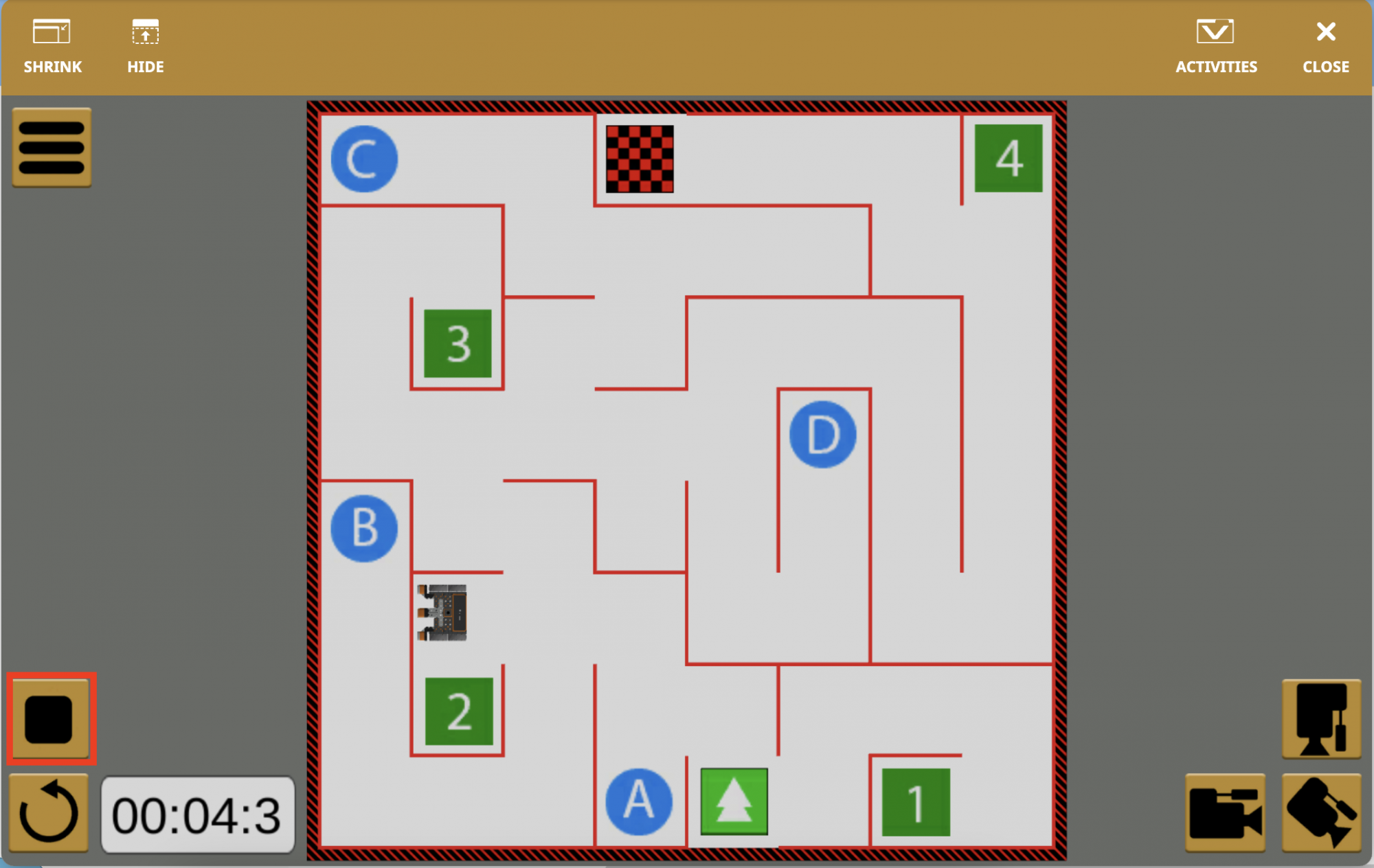
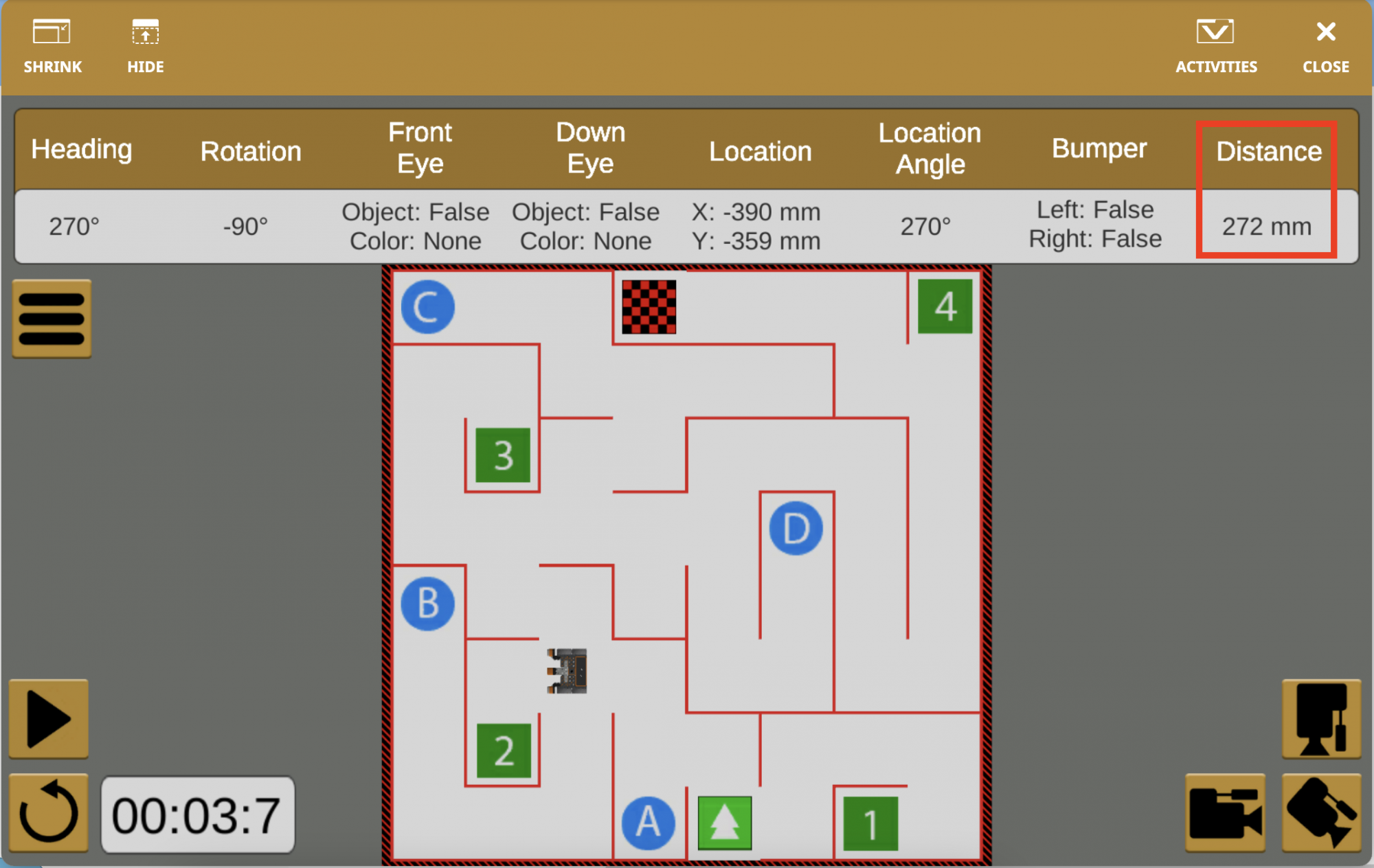
يمكن إيقاف مشروع VEXcode VR أثناء التشغيل. بمجرد إيقافها، ستعرض القيم الموجودة في لوحة المعلومات قيم المستشعر من روبوت الواقع الافتراضي في وقت إيقافها. يمكن استخدام هذا لمراقبة قيم المستشعر بالإضافة إلى تصور المسافة بين روبوت الواقع الافتراضي وجسم ما في وقت معين.
-
أوقف المشروع عندما يصل روبوت الواقع الافتراضي إلى نقطة الخطأ لمعرفة القيمة الجديدة التي يجب تعيينها في <Less than> الكتلة.
-
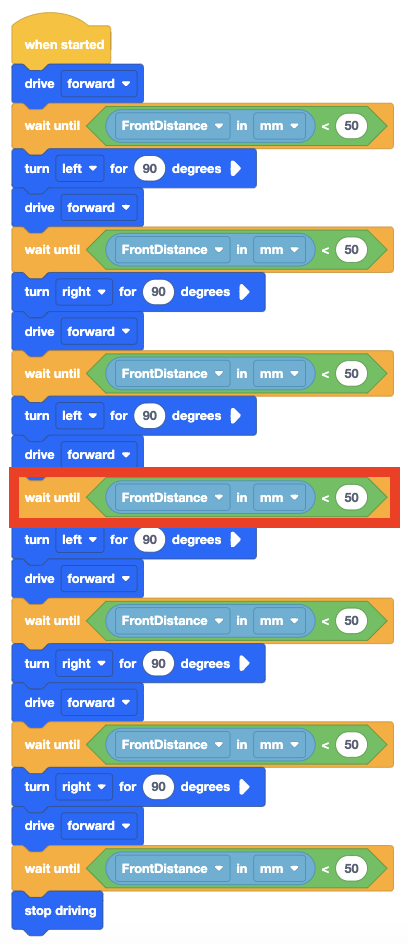
ستحتاج قيمة هذه الكتلة [انتظر حتى] إلى التغيير حتى يتمكن روبوت الواقع الافتراضي من القيادة بنجاح إلى الحرف "B".
لمعلوماتك
يمكن أيضًا مراقبة القيم التي تم الإبلاغ عنها بواسطة مستشعر المسافة في وحدة التحكم في الشاشة. تتيح مراقبة قيم المستشعر في وحدة تحكم الشاشة للمستخدم عرض تقارير في الوقت الفعلي لقيمة محددة (أو قيم متعددة) في المشروع. قم بالوصول إلى نافذة الشاشة عن طريق تحديد أيقونة الشاشة بجوار التعليمات.

في هذا المشروع، يمكن استخدام وحدة التحكم في الشاشة لعرض القيم التي يتم الإبلاغ عنها بواسطة كتلة (المسافة من) للمساعدة في تحديد متى يحتاج روبوت الواقع الافتراضي إلى الدوران للقيادة بنجاح عبر ملعب المتاهة الجدارية. شاهد الفيديو أدناه لمشاهدة مثال على استخدام وحدة التحكم في الشاشة لعرض بيانات المسافة المباشرة من روبوت الواقع الافتراضي.
يمكن إضافة كتل من فئة الاستشعار في صندوق الأدوات إلى وحدة التحكم في الشاشة عن طريق تحديد الكتلة وسحبها إلى رمز وحدة التحكم في الشاشة في مساحة العمل. لإزالة قيم المستشعر من وحدة التحكم في الشاشة، حدد أيقونة "X". شاهد الفيديو أدناه لترى كيف يمكنك سحب وإسقاط كتل الاستشعار على أيقونة وحدة التحكم في الشاشة لإضافتها إلى قائمة المستشعرات.
- سيؤدي تغيير معلمة <Less than> الكتلة إلى 300 إلى توجيه روبوت الواقع الافتراضي للانعطاف يسارًا
بمجرد أن يبلغ مستشعر المسافة أن روبوت الواقع الافتراضي يبعد أقل من 300 ملليمتر (مم) عن الجدار
التالي.

-
قم بتشغيل Wall Maze Playground إذا لم يكن مفتوحًا بالفعل وقم بتشغيل المشروع مرة أخرى.

- يتحرك روبوت الواقع الافتراضي الآن من بداية ملعب المتاهة الجدارية ويتوقف عند الحرف "B".
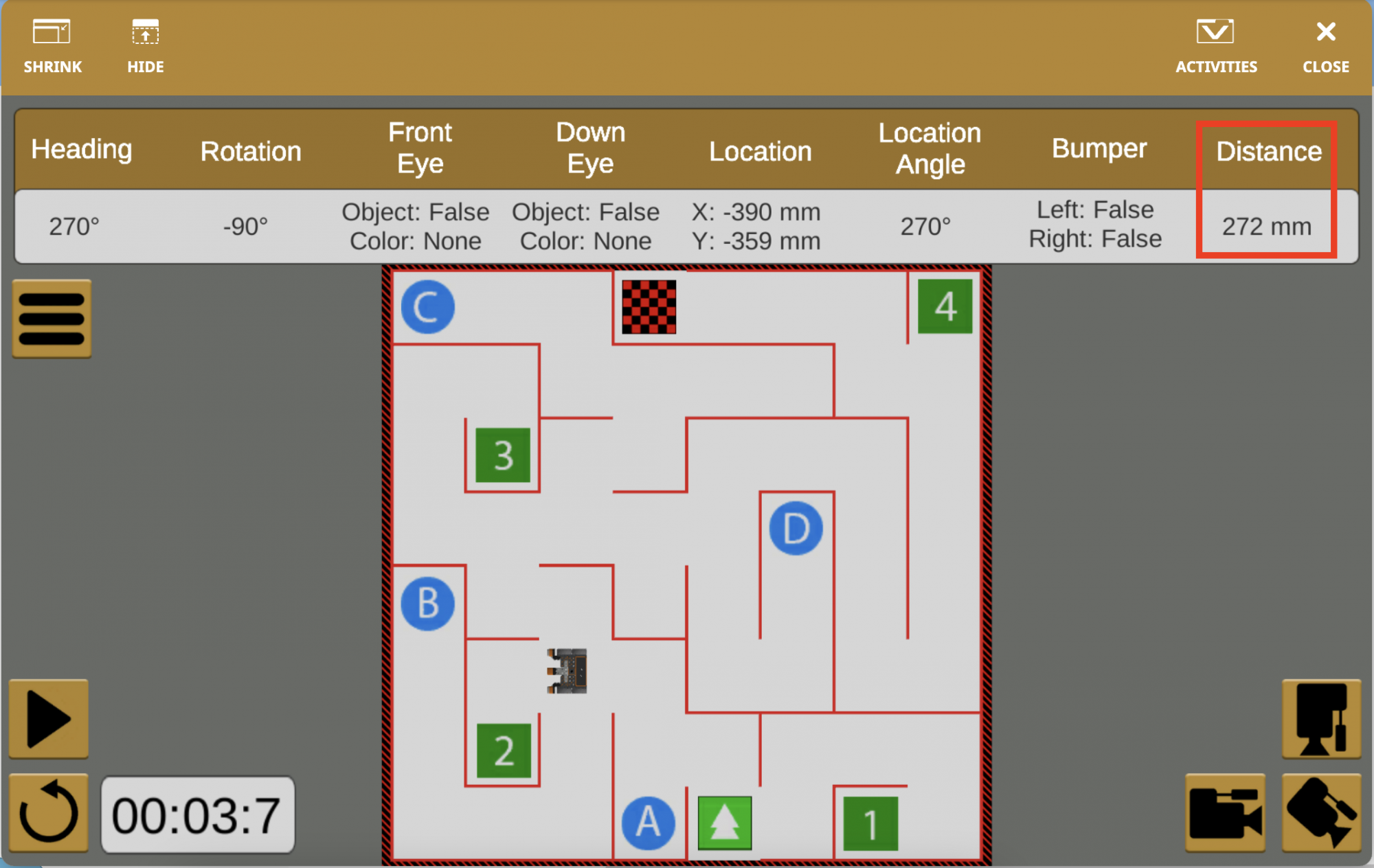
- لاحظ أن تغيير معلمة <Less than> الكتلة إلى 300 ملليمتر سمح لروبوت الواقع الافتراضي بالدوران على مسافة أبعد من الجدار، وهو أمر ضروري للدوران في الموقع الصحيح.
- تم استخدام قيمة المسافة المبلغ عنها في لوحة المعلومات لمراقبة مدى بعد روبوت الواقع الافتراضي عن الحائط
عندما يحتاج إلى الالتفاف للوصول إلى الحرف "B".
قم بتحديد زر التالي للمتابعة مع بقية هذا الدرس.