
3과: 좌회전해서 'B'에 도달하세요.
귀하의 정보를 위해
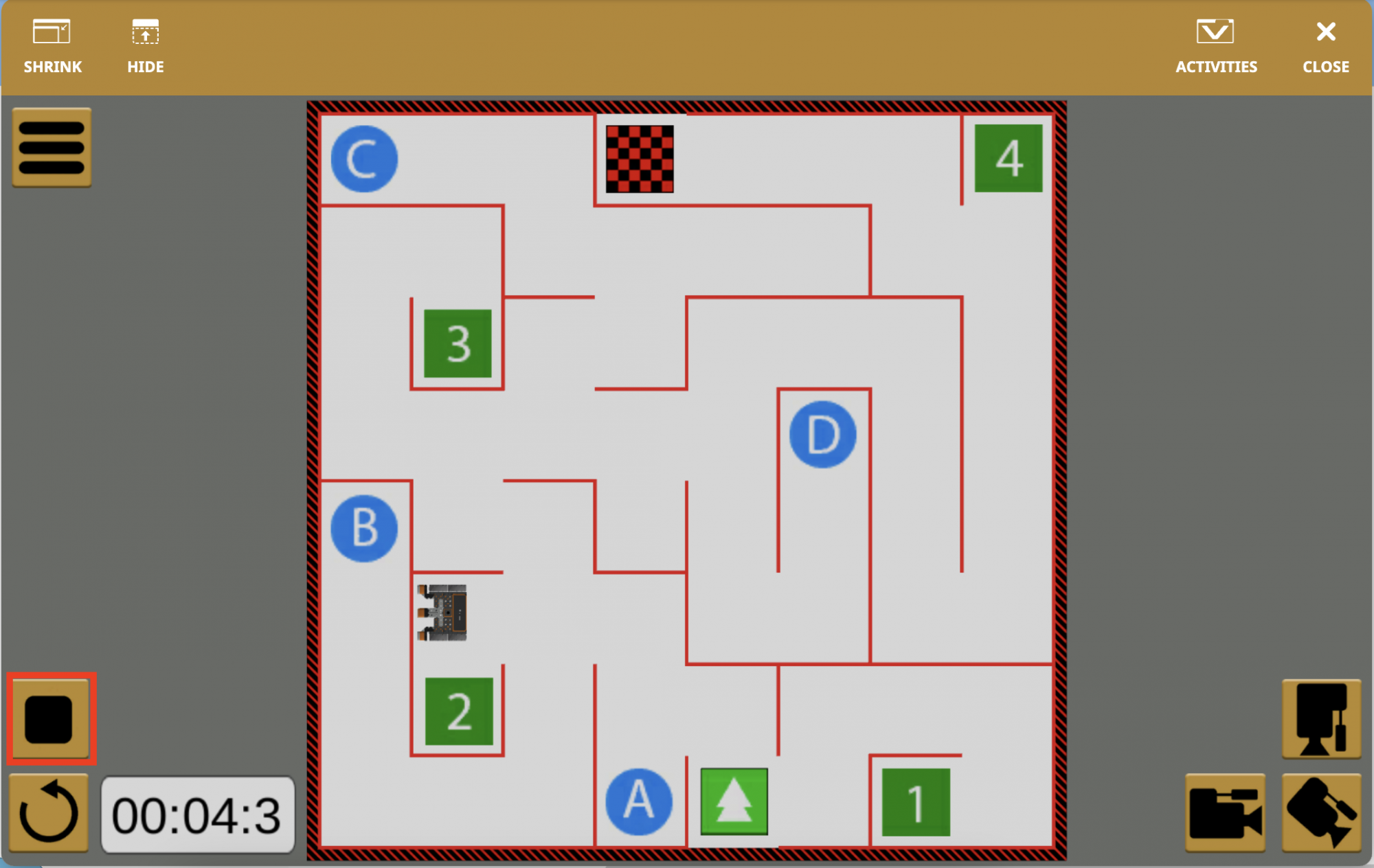
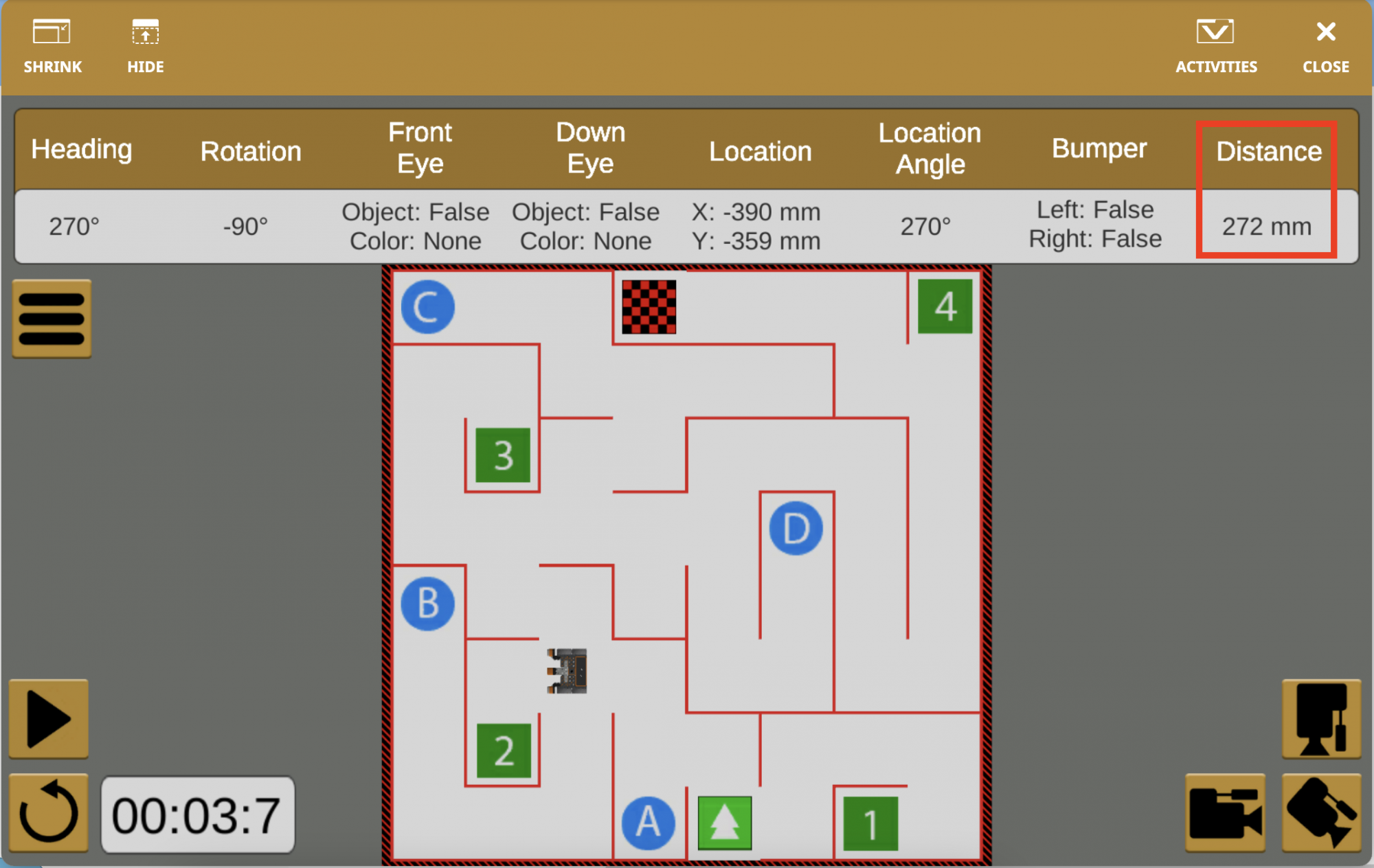
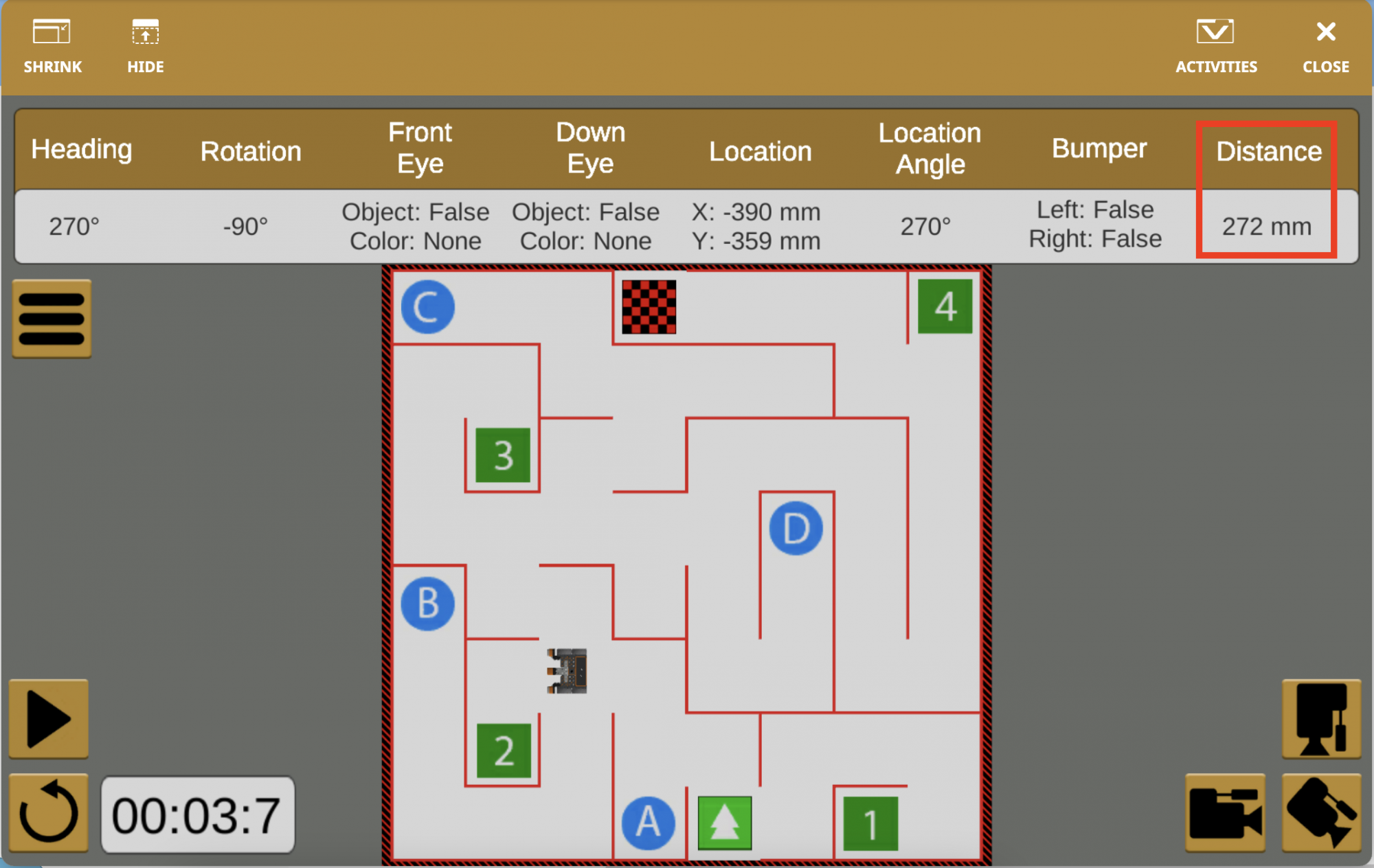
VEXcode VR 프로젝트는 실행 중에 중지될 수 있습니다. VR 로봇이 멈추면 대시보드의 값은 멈췄을 당시의 VR 로봇의 센서 값을 표시합니다. 이는 센서 값을 관찰하고 특정 시점에서 VR 로봇과 물체 사이의 거리를 시각화하는 데 사용할 수 있습니다.
-
VR 로봇이 오류 지점에 도달하면 프로젝트를 중지하고 <Less than> 블록에 어떤 새 값을 설정해야 하는지 확인합니다.
-
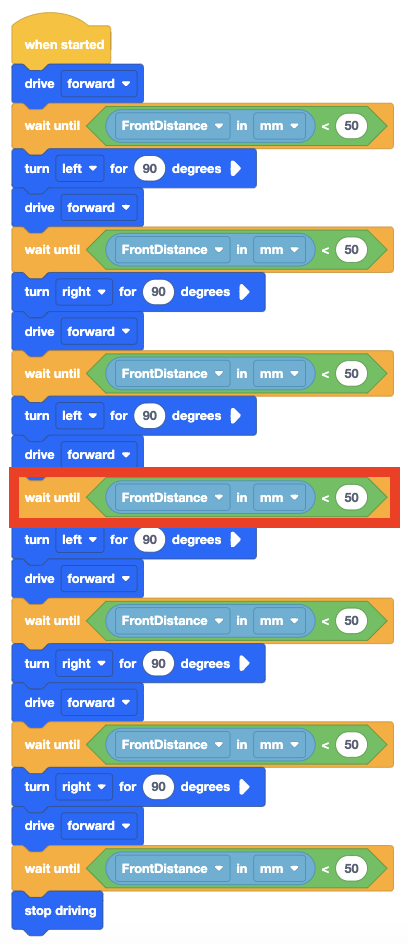
VR 로봇이 문자 'B'까지 성공적으로 주행하려면 이 [대기] 블록의 값이 변경되어야 합니다.
귀하의 정보를 위해
거리 센서에서 보고된 값은 모니터 콘솔에서도 모니터링할 수 있습니다. 모니터 콘솔에서 센서 값을 모니터링하면 사용자는 프로젝트의 특정 값(또는 여러 값)에 대한 실시간 보고서를 볼 수 있습니다. 도움말 옆에 있는 모니터 아이콘을 선택하여 모니터 창에 액세스하세요.

이 프로젝트에서는 모니터 콘솔을 사용하여 (Distance from) 블록에서 보고되는 값을 보고, 이를 통해 VR 로봇이 Wall Maze Playground을 성공적으로 주행하기 위해 언제 회전해야 하는지 결정하는 데 도움을 줍니다. 아래 영상을 시청하면 VR 로봇의 실시간 거리 데이터를 보기 위해 모니터 콘솔을 사용하는 예를 볼 수 있습니다.
도구 상자의 감지 범주에 있는 블록을 모니터 콘솔에 추가하려면 해당 블록을 선택하여 작업 공간의 모니터 콘솔 아이콘으로 끌어다 놓습니다. 모니터 콘솔에서 센서 값을 제거하려면 'X' 아이콘을 선택하세요. 아래 비디오를 시청하여 감지 블록을 모니터 콘솔 아이콘으로 끌어서 놓아 센서 목록에 추가하는 방법을 알아보세요.
- <Less than> 블록 매개변수를 300으로 변경하면 거리 센서가 VR 로봇이 다음 벽으로부터 300밀리미터(mm) 이내에 있다고 보고하면 VR 로봇이 좌회전하도록 지시합니다.

-
아직 열려 있지 않으면 Wall Maze Playground 을 실행하고 프로젝트를 다시 실행합니다.

- VR 로봇은 이제 벽 미로 놀이터 의 시작점에서 출발하여 'B'라는 글자에서 멈춥니다.
- <Less than> 블록 매개변수를 300밀리미터로 변경하면 VR 로봇이 벽으로부터 더 먼 거리에서 회전할 수 있는데, 이는 올바른 위치에서 회전하는 데 필요한 것입니다.
- 대시보드에 보고된 거리 값은 VR 로봇이 문자 'B'에 도달하기 위해 방향을 바꿔야 할 때 벽으로부터 얼마나 떨어져 있었는지 관찰하는 데 사용되었습니다.
이 강의의 나머지 부분을 계속하려면 다음 버튼을 선택하세요.