
Lição 3: Vire à esquerda para alcançar a letra ‘B.’
Para sua informação
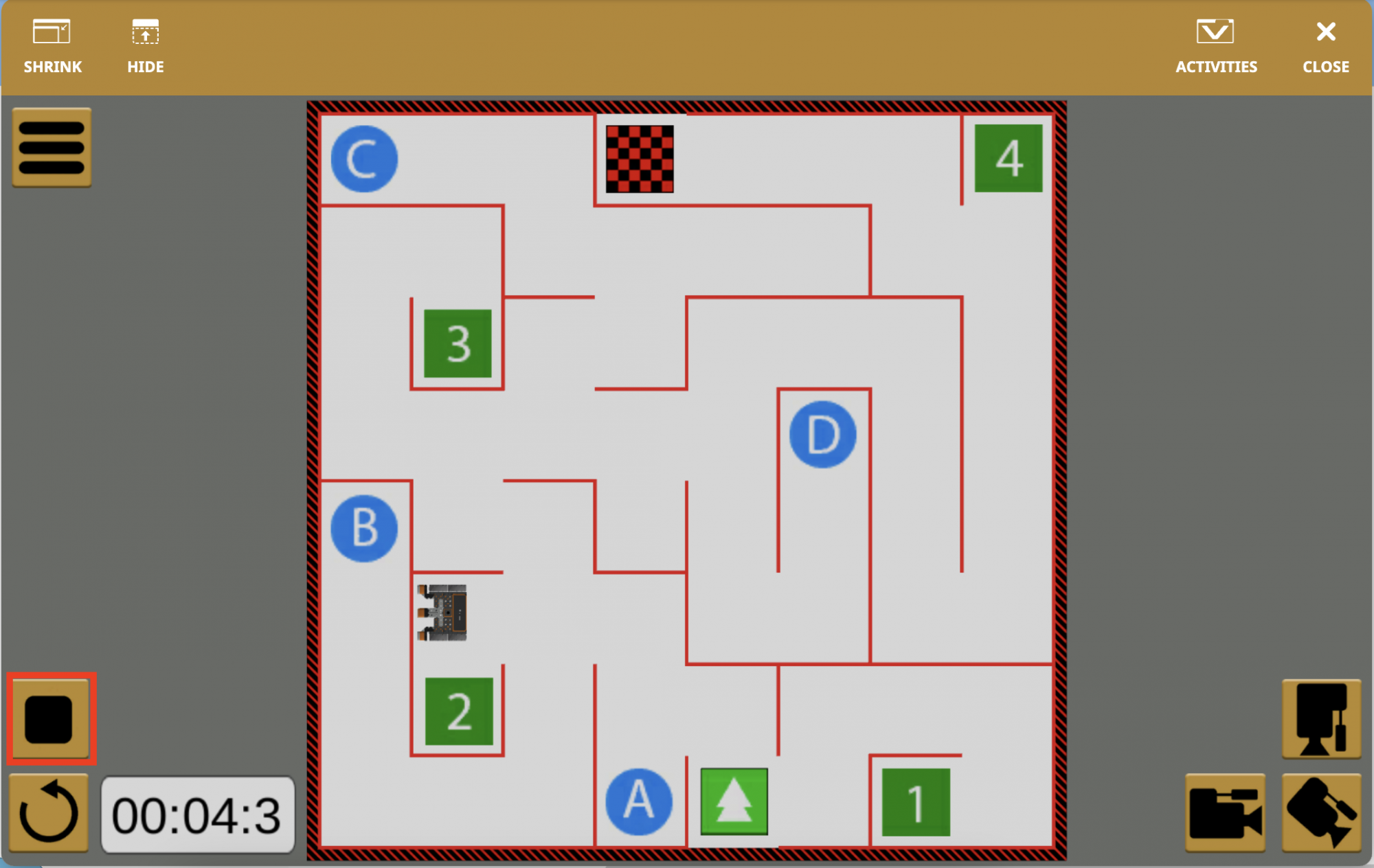
Um projeto VEXcode VR pode ser interrompido durante a execução. Uma vez parado, os valores no Painel exibirão os valores do sensor do Robô VR no momento em que foi parado. Isso pode ser usado para observar os valores do sensor, bem como visualizar a distância entre o robô VR e um objeto em um determinado ponto no tempo.
-
Pare o projeto quando o Robô VR atingir o ponto de erro para ver qual novo valor deve ser definido no <Less than> bloco.
-
O valor deste bloco [Aguarde até] precisará ser alterado para que o robô de RV conduza com sucesso à letra ‘B.’

Para sua informação
Os valores reportados pelo Sensor de Distância também podem ser monitorados no Console do Monitor. A monitorização dos valores do sensor na Consola do Monitor permite ao utilizador visualizar relatórios em tempo real de um valor específico (ou vários valores) num projeto. Aceda à Janela do Monitor selecionando o ícone Monitor ao lado da Ajuda.

Neste projeto, o Console do Monitor pode ser usado para visualizar os valores relatados pelo bloco (Distância de) para ajudar a determinar quando o Robô de RV precisa girar para dirigir com sucesso pelo Wall Maze Playground. Assista ao vídeo abaixo para ver um exemplo de como usar o Console do Monitor para visualizar dados de distância ao vivo do robô de RV.
Os blocos da categoria Sensoriamento na Caixa de Ferramentas podem ser adicionados ao Console do Monitor selecionando e arrastando o bloco para o ícone do Console do Monitor no Espaço de Trabalho. Para remover os valores do sensor da Consola do Monitor, selecione o ícone 'X'. Assista ao vídeo abaixo para ver como você pode arrastar e soltar blocos de detecção no ícone do Console do Monitor para adicioná-los à lista de sensores.
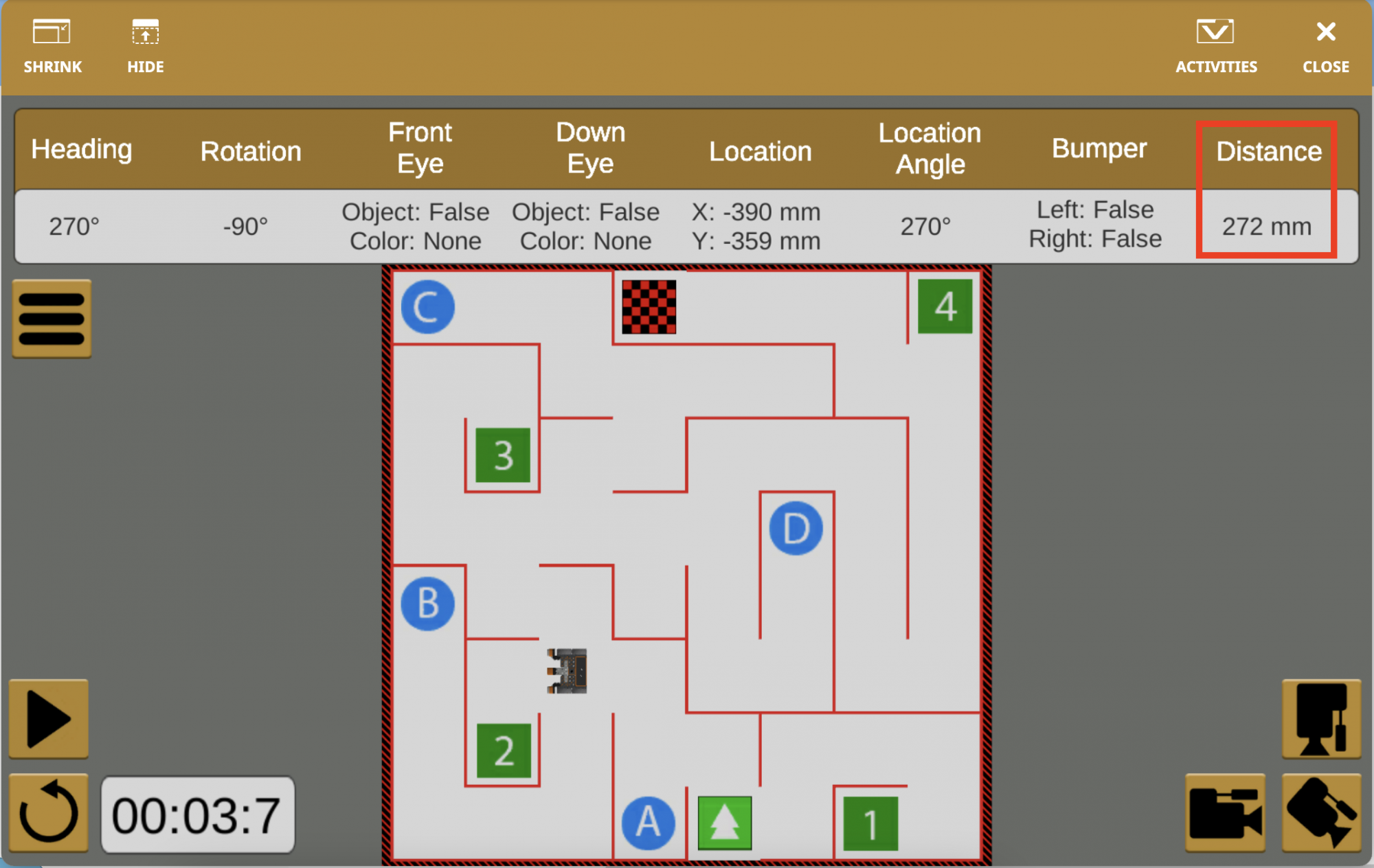
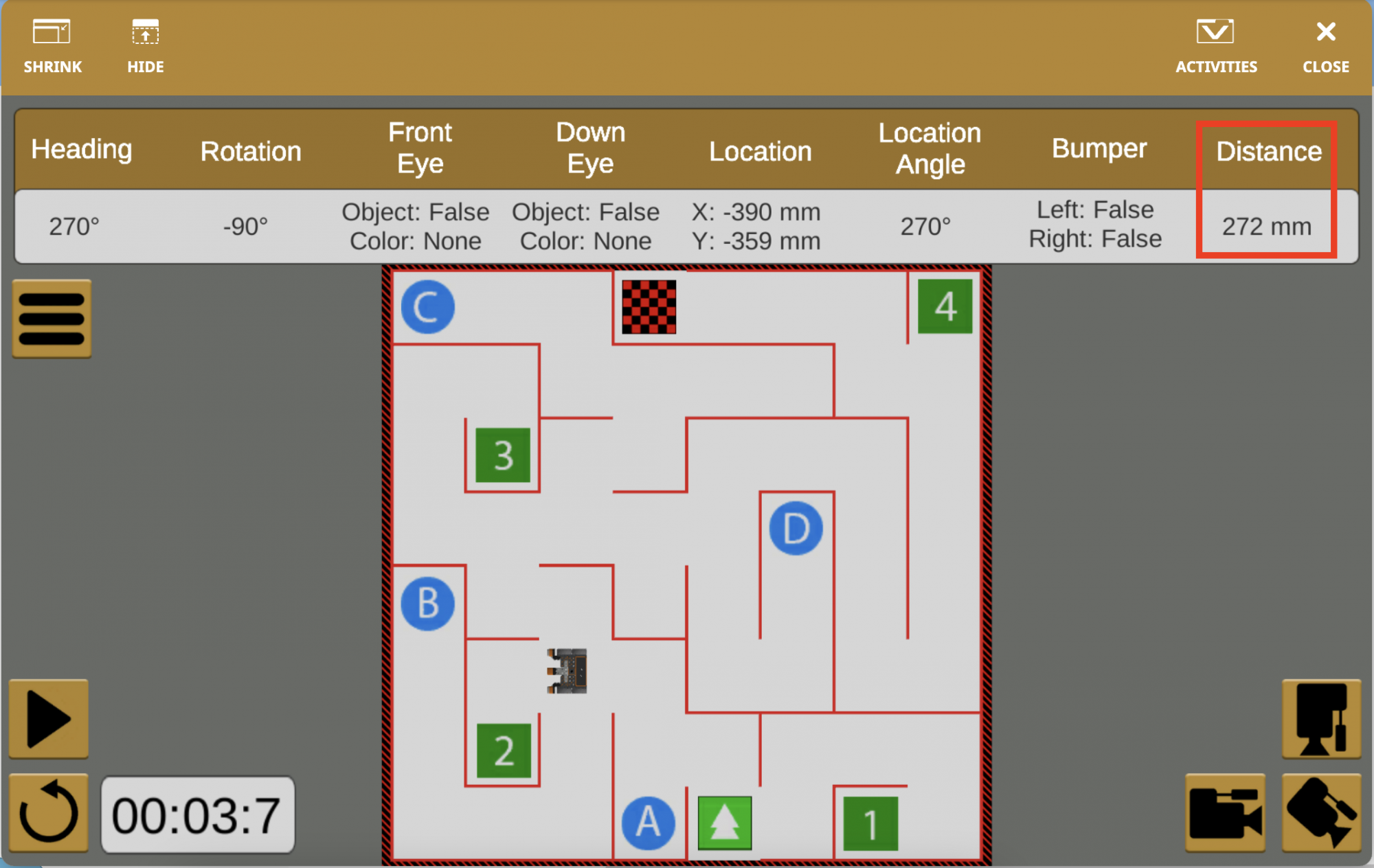
- Alterar o parâmetro do <Less than> bloco para 300 instruirá o Robô VR a virar à esquerda assim que o Sensor de Distância informar que o Robô VR está a menos de 300 milímetros (mm) de distância da próxima parede.

-
Inicie o Wall Maze Playground, se ainda não estiver aberto, e execute o projeto novamente.

- O robô VR agora dirige desde o início do Wall Maze Playground e para na letra ‘B.’
- Observe que a alteração do parâmetro do <Less than> bloco para 300 milímetros permitiu que o Robô VR girasse a uma distância mais distante da parede, o que foi necessário para girar no local correto.
- O valor de distância relatado no Painel foi usado para observar a que distância o Robô VR estava de uma parede quando precisava girar para chegar à letra ‘B.’
Selecione o botão Seguinte para continuar com o resto desta lição.