
পাঠ ৩: 'B' অক্ষরে পৌঁছানোর জন্য বাম দিকে ঘুরুন।
আপনার জ্ঞাতার্থে
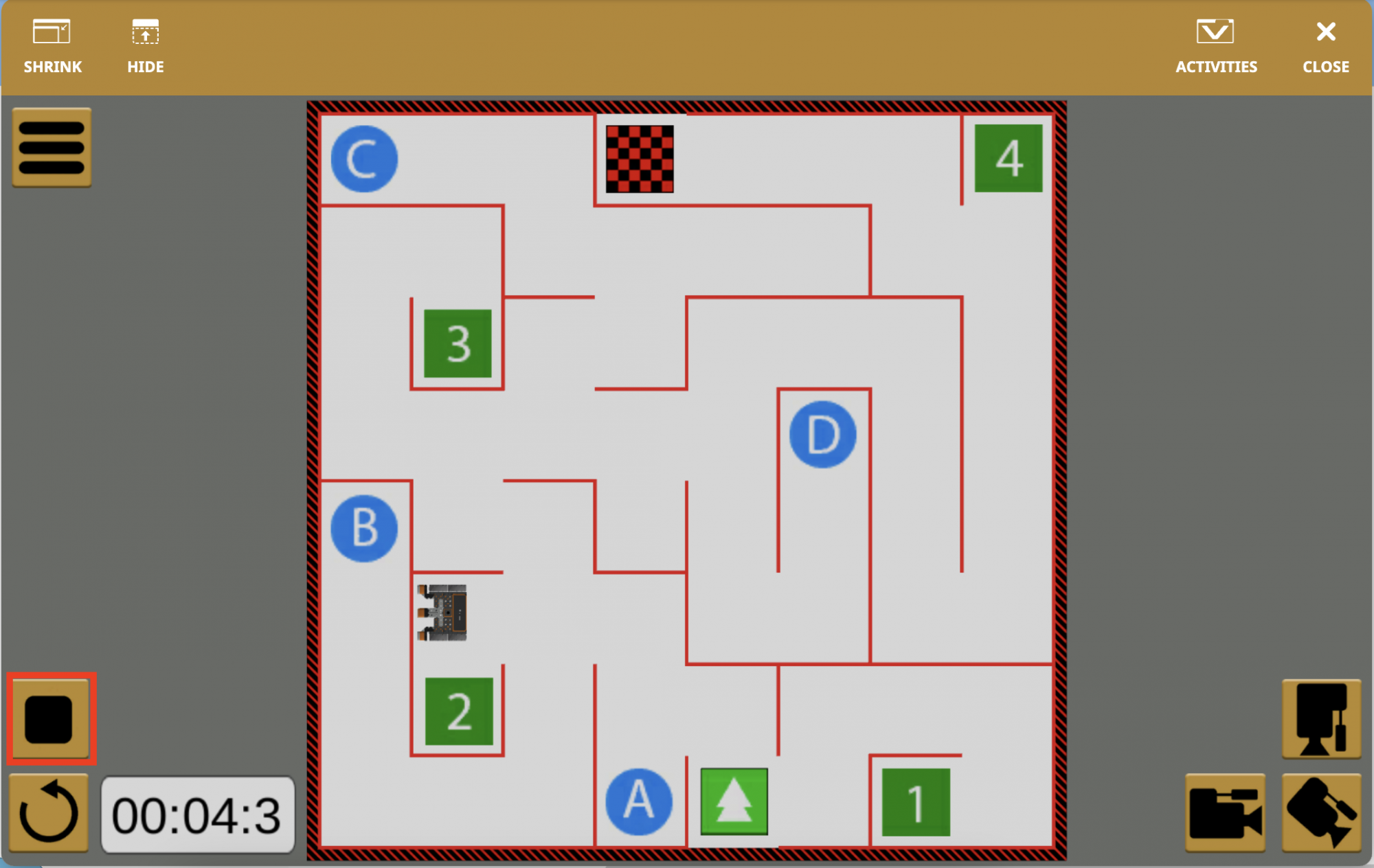
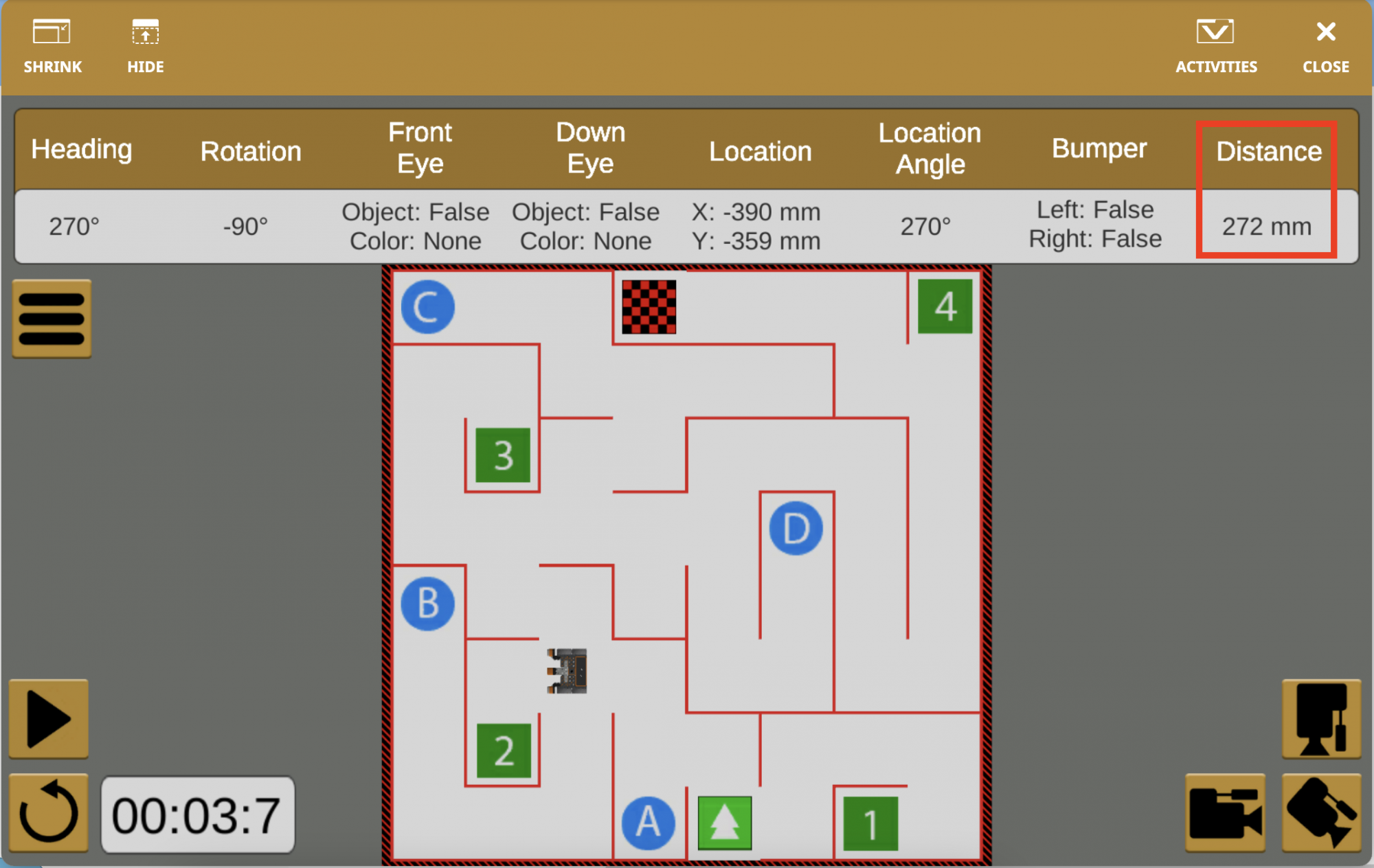
একটি VEXcode VR প্রকল্প চলমান অবস্থায় বন্ধ করা যেতে পারে। একবার বন্ধ হয়ে গেলে, ড্যাশবোর্ডের মানগুলি VR রোবটটি বন্ধ করার সময় থেকে সেন্সর মানগুলি প্রদর্শন করবে। এটি সেন্সর মান পর্যবেক্ষণ করতে এবং একটি নির্দিষ্ট সময়ে ভিআর রোবট এবং একটি বস্তুর মধ্যে দূরত্ব কল্পনা করতে ব্যবহার করা যেতে পারে।
-
<Less than> ব্লকে কোন নতুন মান সেট করা উচিত তা দেখতে VR রোবট ত্রুটি বিন্দুতে পৌঁছালে প্রকল্পটি বন্ধ করুন।
-
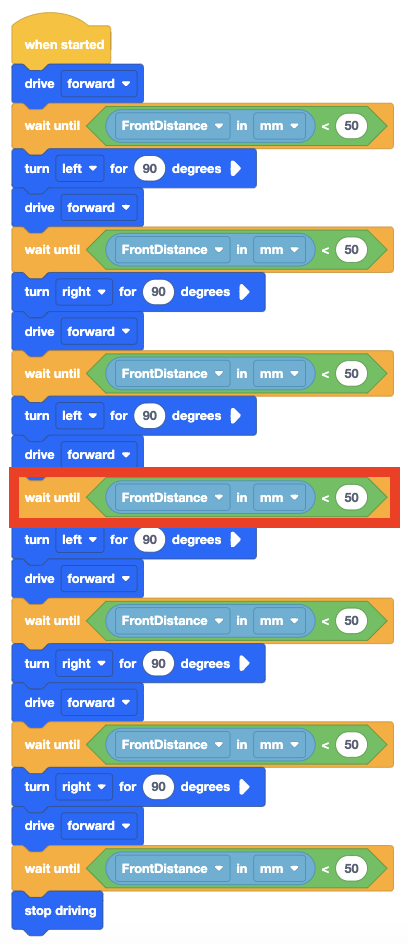
এই [অপেক্ষা করুন] ব্লকের মান পরিবর্তন করতে হবে যাতে VR রোবট সফলভাবে 'B' অক্ষরে চলে যায়।
আপনার তথ্যের জন্য
দূরত্ব সেন্সর দ্বারা রিপোর্ট করা মানগুলি মনিটর কনসোলেও পর্যবেক্ষণ করা যেতে পারে। মনিটর কনসোলে সেন্সর মান পর্যবেক্ষণ করা ব্যবহারকারীকে একটি প্রকল্পে একটি নির্দিষ্ট মান (বা একাধিক মান) এর রিয়েল-টাইম রিপোর্ট দেখতে দেয়। সাহায্যের পাশের মনিটর আইকনটি নির্বাচন করে মনিটর উইন্ডোতে প্রবেশ করুন।

এই প্রজেক্টে, মনিটর কনসোলটি (থেকে দূরত্ব) ব্লকের দ্বারা রিপোর্ট করা মানগুলি দেখতে ব্যবহার করা যেতে পারে যাতে VR রোবটকে ওয়াল মেজ প্লেগ্রাউন্ডমধ্য দিয়ে সফলভাবে গাড়ি চালানোর জন্য কখন ঘুরতে হবে তা নির্ধারণ করতে সহায়তা করে। ভিআর রোবট থেকে লাইভ দূরত্বের ডেটা দেখার জন্য মনিটর কনসোল ব্যবহারের উদাহরণ দেখতে নীচের ভিডিওটি দেখুন।
টুল বক্সের সেন্সিং ক্যাটাগরি থেকে ব্লকগুলিকে বেছে নিয়ে ওয়ার্কস্পেসের মনিটর কনসোল আইকনে ব্লক টেনে মনিটর কনসোলে যোগ করা যেতে পারে। মনিটর কনসোল থেকে সেন্সর মান অপসারণ করতে, 'X' আইকন নির্বাচন করুন। সেন্সরের তালিকায় যুক্ত করার জন্য আপনি কীভাবে সেন্সিং ব্লকগুলিকে মনিটর কনসোল আইকনে টেনে এনে ফেলে দিতে পারেন তা দেখতে নীচের ভিডিওটি দেখুন।
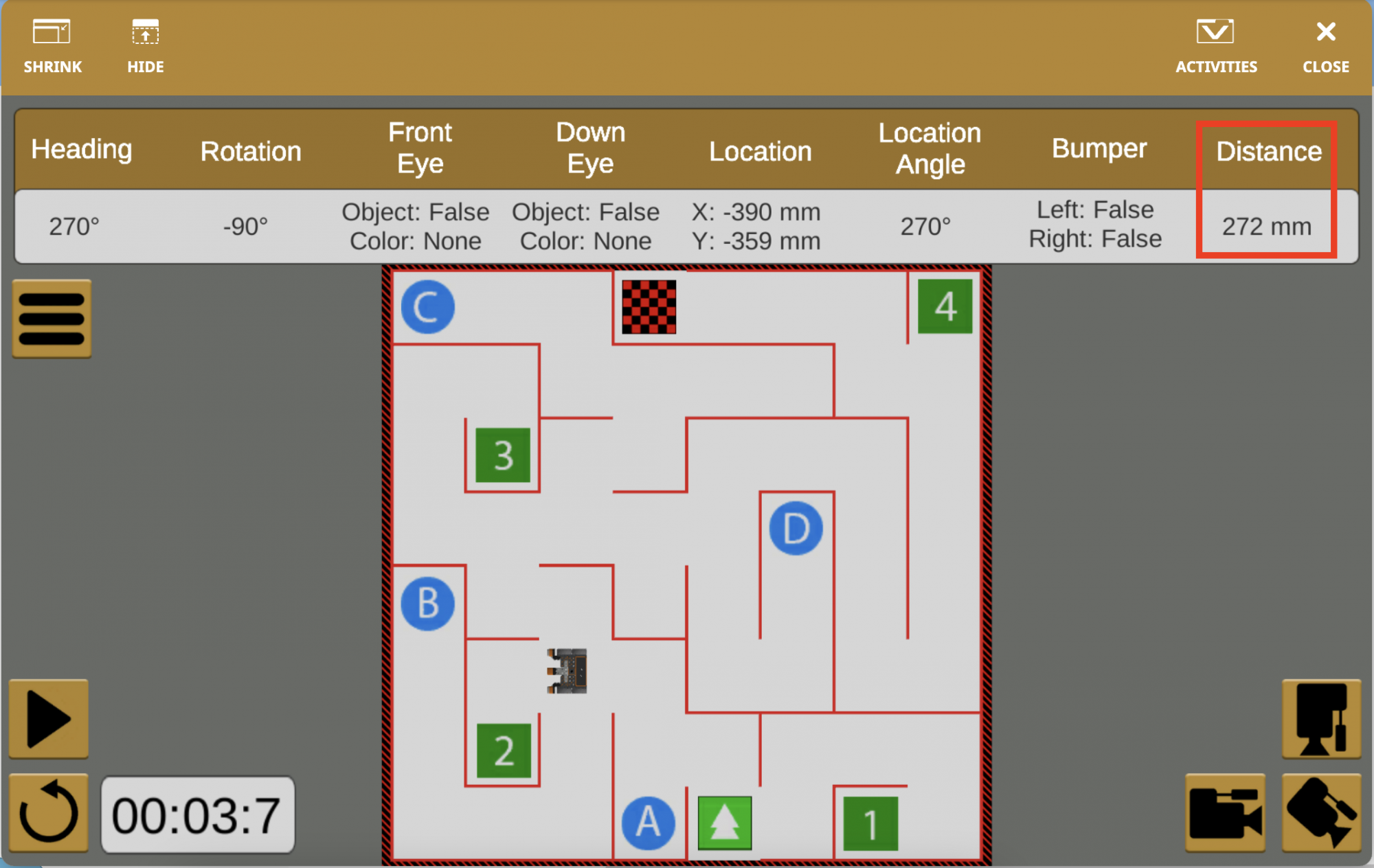
- <Less than> ব্লক প্যারামিটার 300 এ পরিবর্তন করা হলে VR রোবটকে বাম দিকে ঘুরতে নির্দেশ দেবে যখন দূরত্ব সেন্সর রিপোর্ট করবে যে VR রোবটটি পরবর্তী প্রাচীর থেকে 300 মিলিমিটার (মিমি) দূরে রয়েছে।

-
ওয়াল মেজ প্লেগ্রাউন্ড চালু করুন যদি এটি ইতিমধ্যে খোলা না থাকে এবং আবার প্রকল্পটি চালান।

- VR রোবট এখন Wall Maze Playground এর শুরু থেকে ড্রাইভ করে এবং 'B' অক্ষরে থামে।
- লক্ষ্য করুন যে <Less than> ব্লক প্যারামিটারকে 300 মিলিমিটারে পরিবর্তন করার ফলে VR রোবটকে প্রাচীর থেকে আরও দূরে ঘুরতে দেয়, যা সঠিক অবস্থানে ঘুরতে প্রয়োজনীয় ছিল।
- ড্যাশবোর্ডে উল্লিখিত দূরত্বের মানটি 'বি' অক্ষরে যাওয়ার জন্য যখন এটিকে ঘুরতে হবে তখন একটি দেয়াল থেকে VR রোবটটি কতদূর ছিল তা পর্যবেক্ষণ করতে ব্যবহার করা হয়েছিল৷
এই পাঠের বাকি অংশটি চালিয়ে যেতে পরবর্তী বোতামটি নির্বাচন করুন।