
Lektion 3: Biegen Sie links ab, um den Buchstaben „B“ zu erreichen.
Zur Kenntnisnahme
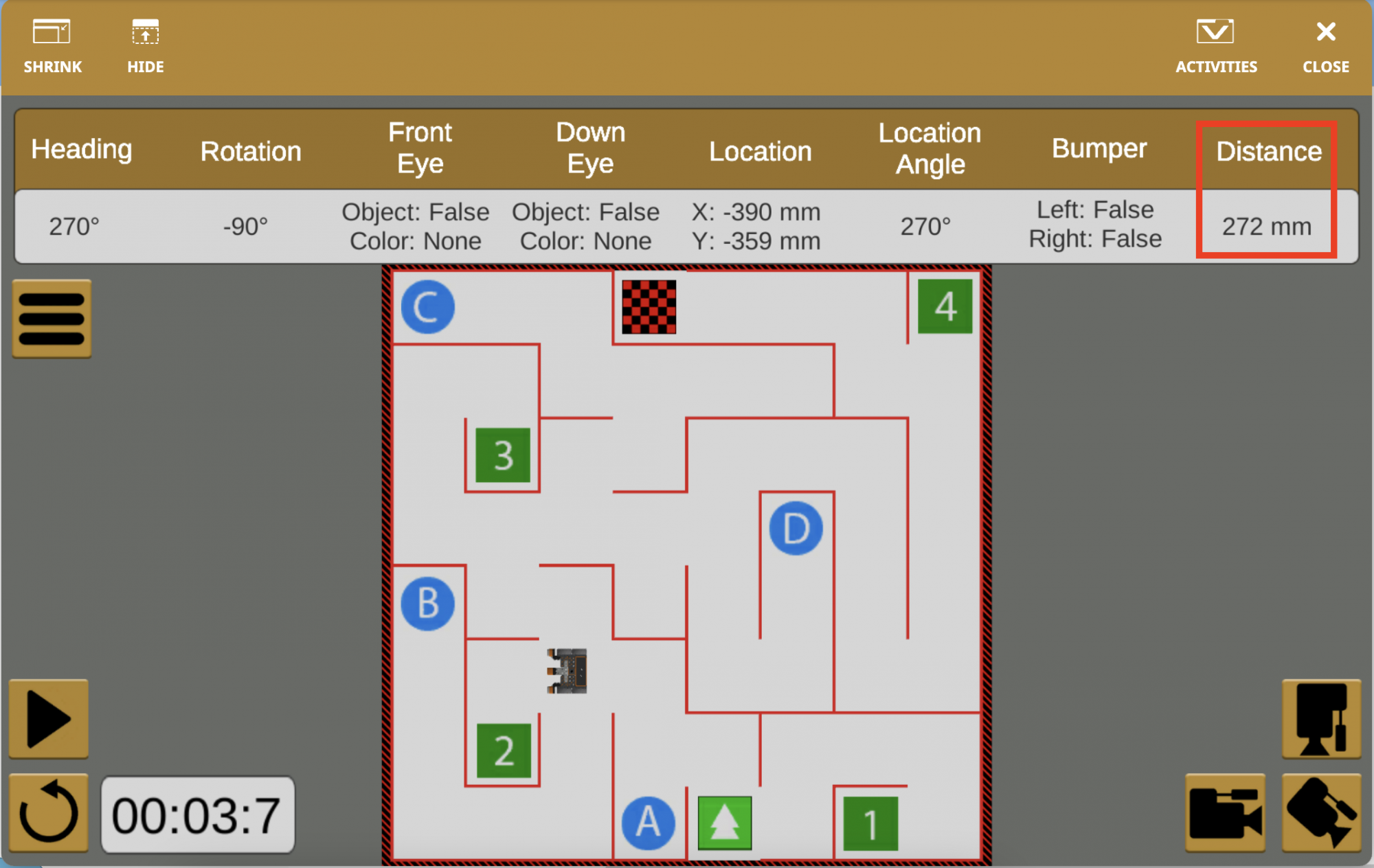
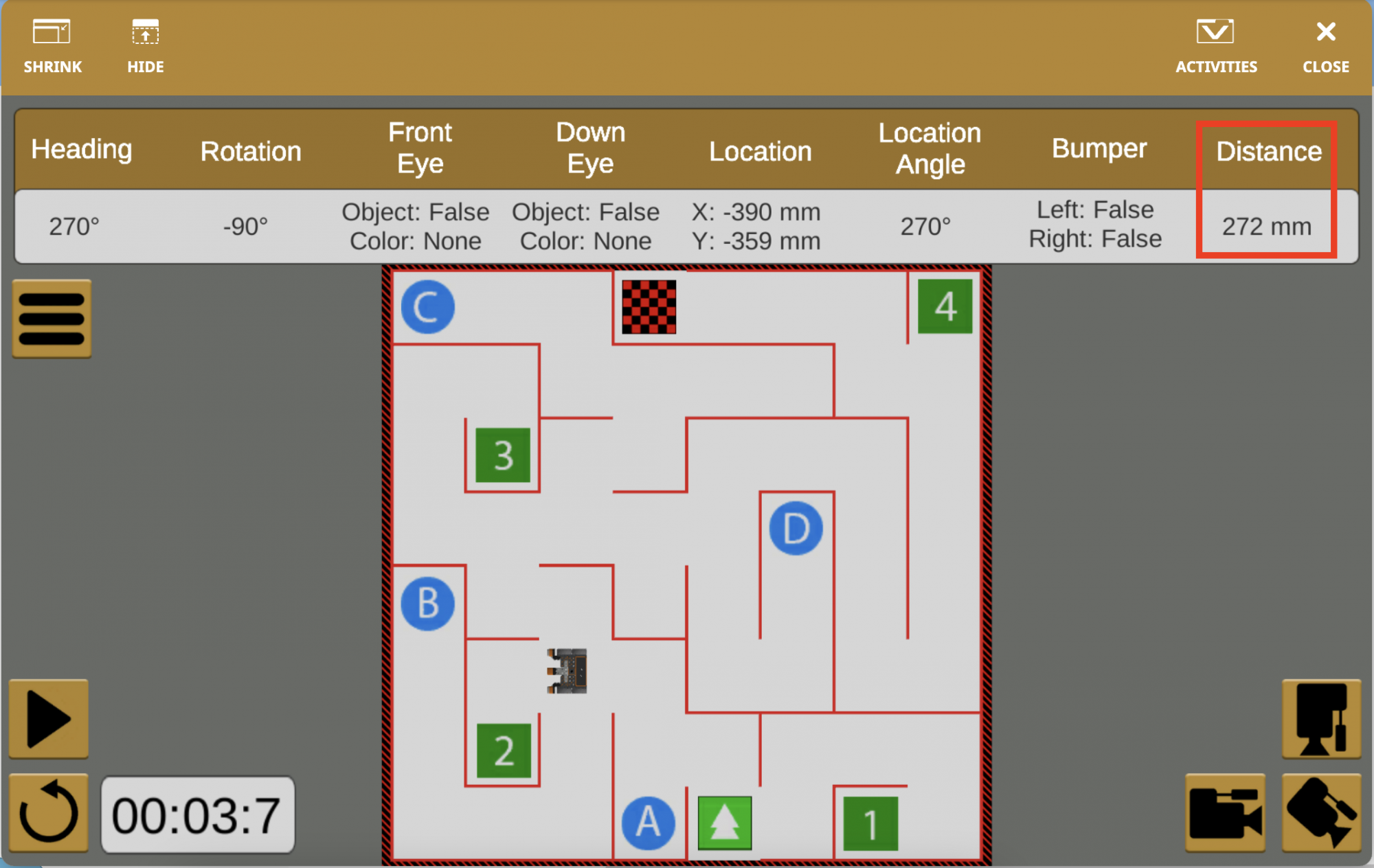
Ein VEXcode VR-Projekt kann während der Ausführung gestoppt werden. Nach dem Stoppen zeigen die Werte im Dashboard die Sensorwerte des VR-Roboters zum Zeitpunkt des Stopps an. Dies kann verwendet werden, um Sensorwerte zu beobachten und den Abstand zwischen dem VR-Roboter und einem Objekt zu einem bestimmten Zeitpunkt zu visualisieren.
-
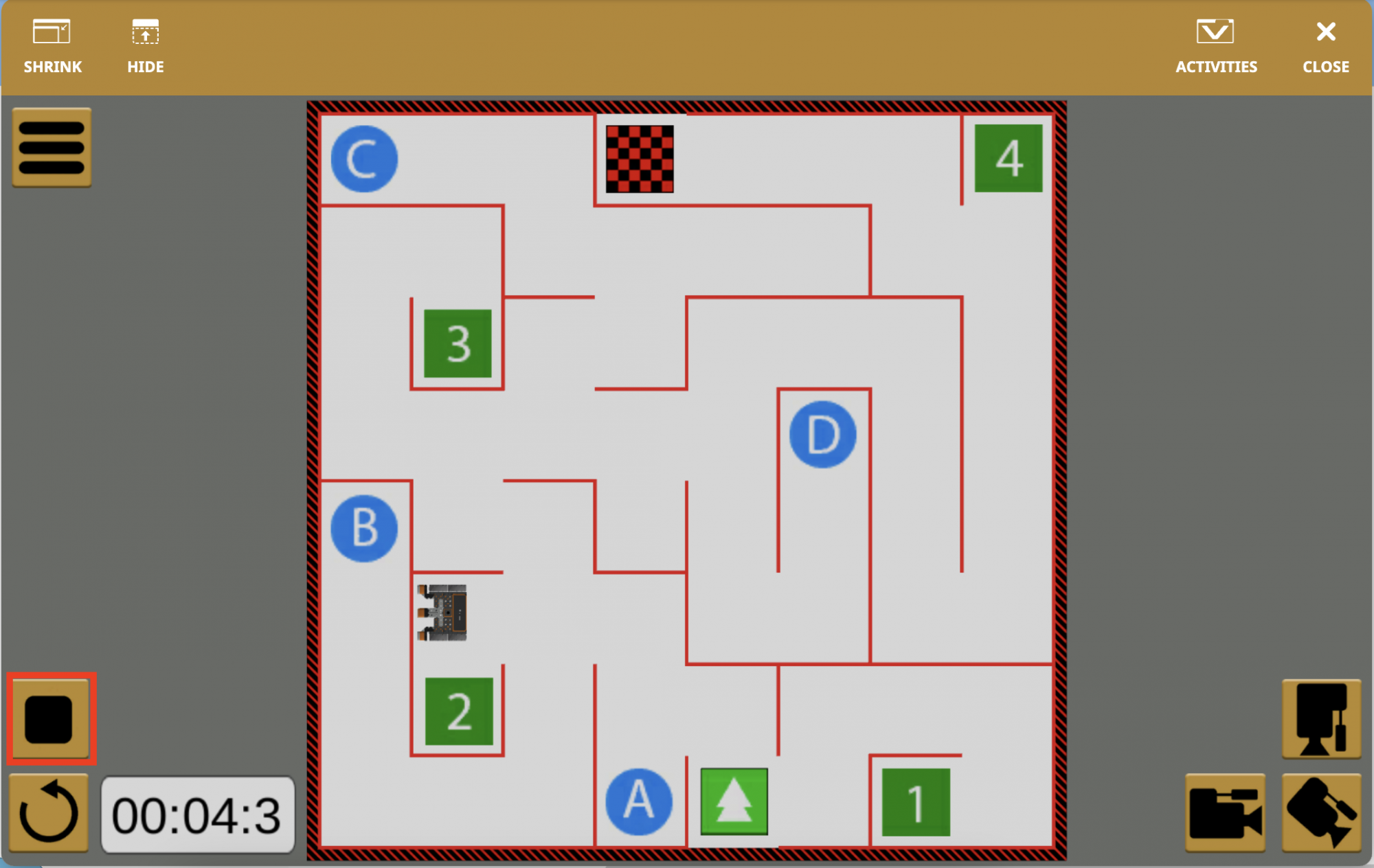
Stoppen Sie das Projekt, wenn der VR-Roboter den Fehlerpunkt erreicht, um zu sehen, welcher neue Wert im <Less than> Block gesetzt werden soll.
-
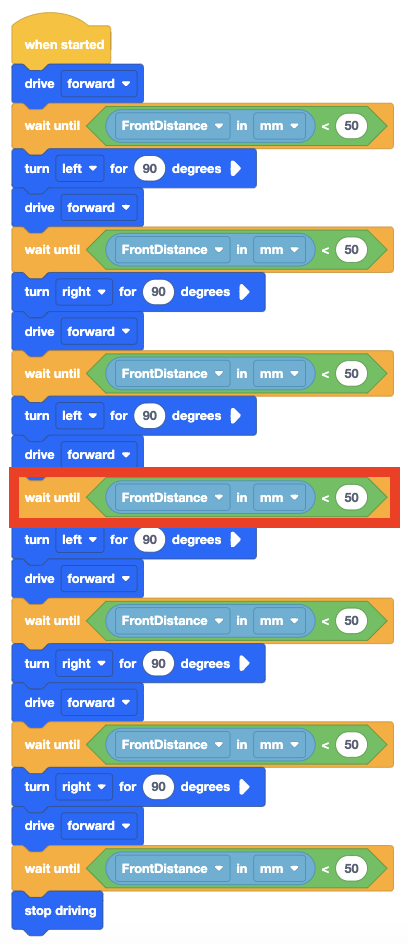
Der Wert dieses [Warten bis] -Blocks muss sich ändern, damit der VR-Roboter erfolgreich zum Buchstaben ‘B‘ fahren kann.
Zur Kenntnisnahme
Die vom Abstandssensor gemeldeten Werte können auch in der Monitor-Konsole überwacht werden. Die Überwachung der Sensorwerte in der Monitorkonsole ermöglicht es dem Benutzer, Echtzeitberichte zu einem bestimmten Wert (oder mehreren Werten) in einem Projekt anzuzeigen. Greifen Sie auf das Monitor-Fenster zu, indem Sie das Monitor-Symbol neben der Hilfe auswählen.

In diesem Projekt kann die Monitorkonsole verwendet werden, um die Werte anzuzeigen, die vom Block (Abstand von) gemeldet werden, um festzustellen, wann sich der VR-Roboter drehen muss, um erfolgreich durch den Wandlabyrinth-Spielplatz zu fahren. Sehen Sie sich das Video unten an, um ein Beispiel für die Verwendung der Monitorkonsole zum Anzeigen von Live-Entfernungsdaten vom VR-Roboter zu sehen.
Blöcke aus der Sensing-Kategorie in der Tool Box können der Monitorkonsole hinzugefügt werden, indem Sie den Block auswählen und auf das Symbol der Monitorkonsole im Arbeitsbereich ziehen. Um Sensorwerte aus der Monitorkonsole zu entfernen, wählen Sie das Symbol 'X'. Sehen Sie sich das Video unten an, um zu sehen, wie Sie Sensorblöcke per Drag & Drop auf das Symbol der Monitorkonsole ziehen können, um sie der Liste der Sensoren hinzuzufügen.
- Wenn Sie den <Less than> Blockparameter auf 300 ändern, wird der VR-Roboter angewiesen, nach links zu drehen, sobald der Abstandssensor meldet, dass der VR-Roboter weniger als 300 Millimeter (mm) von der nächsten Wand entfernt ist.

-
Starten Sie den Wall Maze Playground , wenn er noch nicht geöffnet ist, und führen Sie das Projekt erneut aus.

- Der VR-Roboter fährt jetzt vom Anfang des Wandlabyrinth-Spielplatzes aus und stoppt auf dem Buchstaben „B“.
- Beachten Sie, dass die <Less than> Änderung des Blockparameters auf 300 Millimeter es dem VR-Roboter ermöglichte, sich in einem Abstand weiter von der Wand zu drehen, was notwendig war, um sich an der richtigen Stelle zu drehen.
- Der im Dashboard gemeldete Abstandswert wurde verwendet, um zu beobachten, wie weit der VR-Roboter von einer Wand entfernt war, wenn er sich drehen musste, um zum Buchstaben „B“ zu gelangen.
Wählen Sie die Schaltfläche Weiter um mit dem Rest dieser Lektion fortzufahren.