
บทเรียนที่ 3: เลี้ยวซ้ายเพื่อเข้าถึงตัวอักษร ‘B’
สำหรับข้อมูลของคุณ
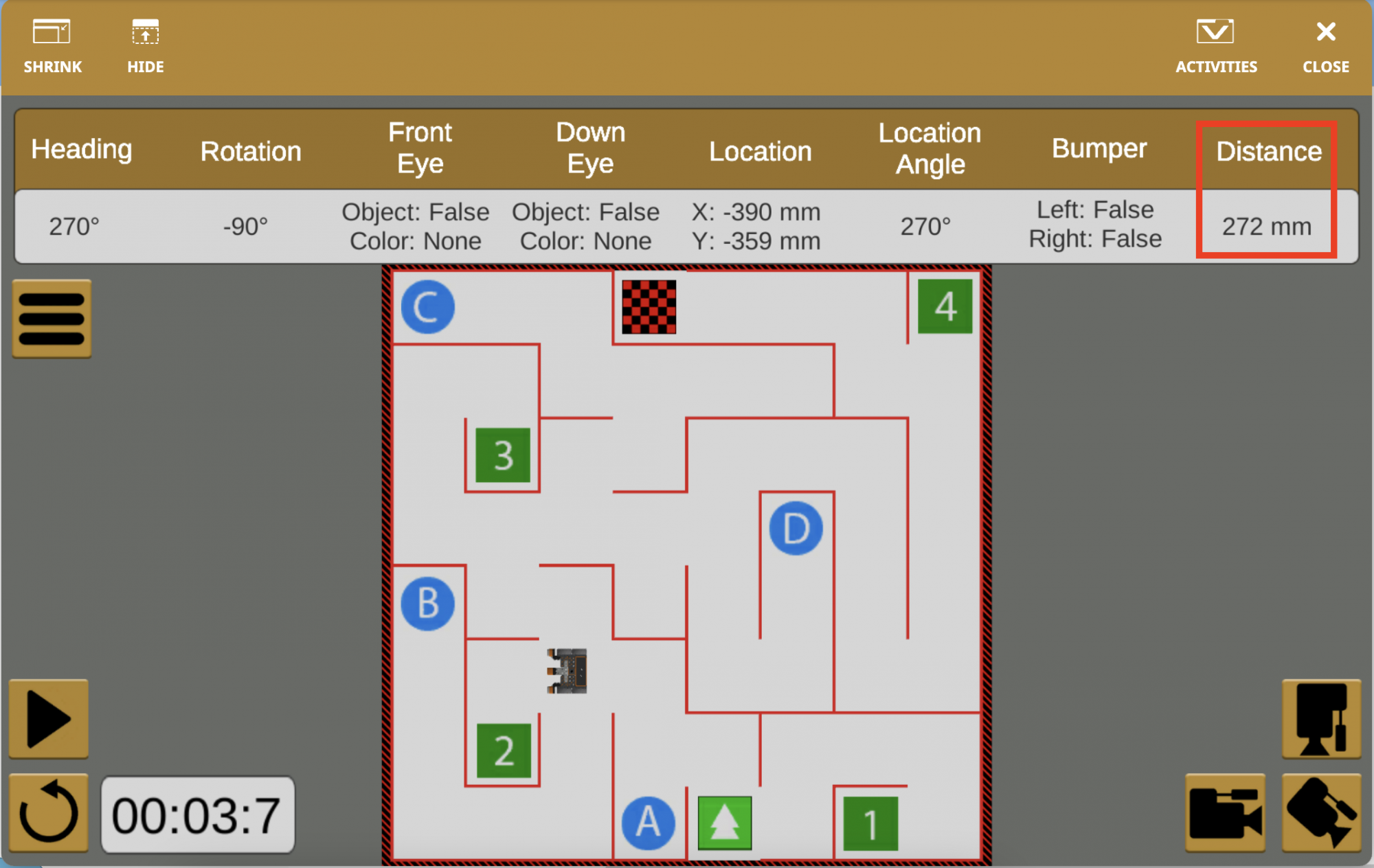
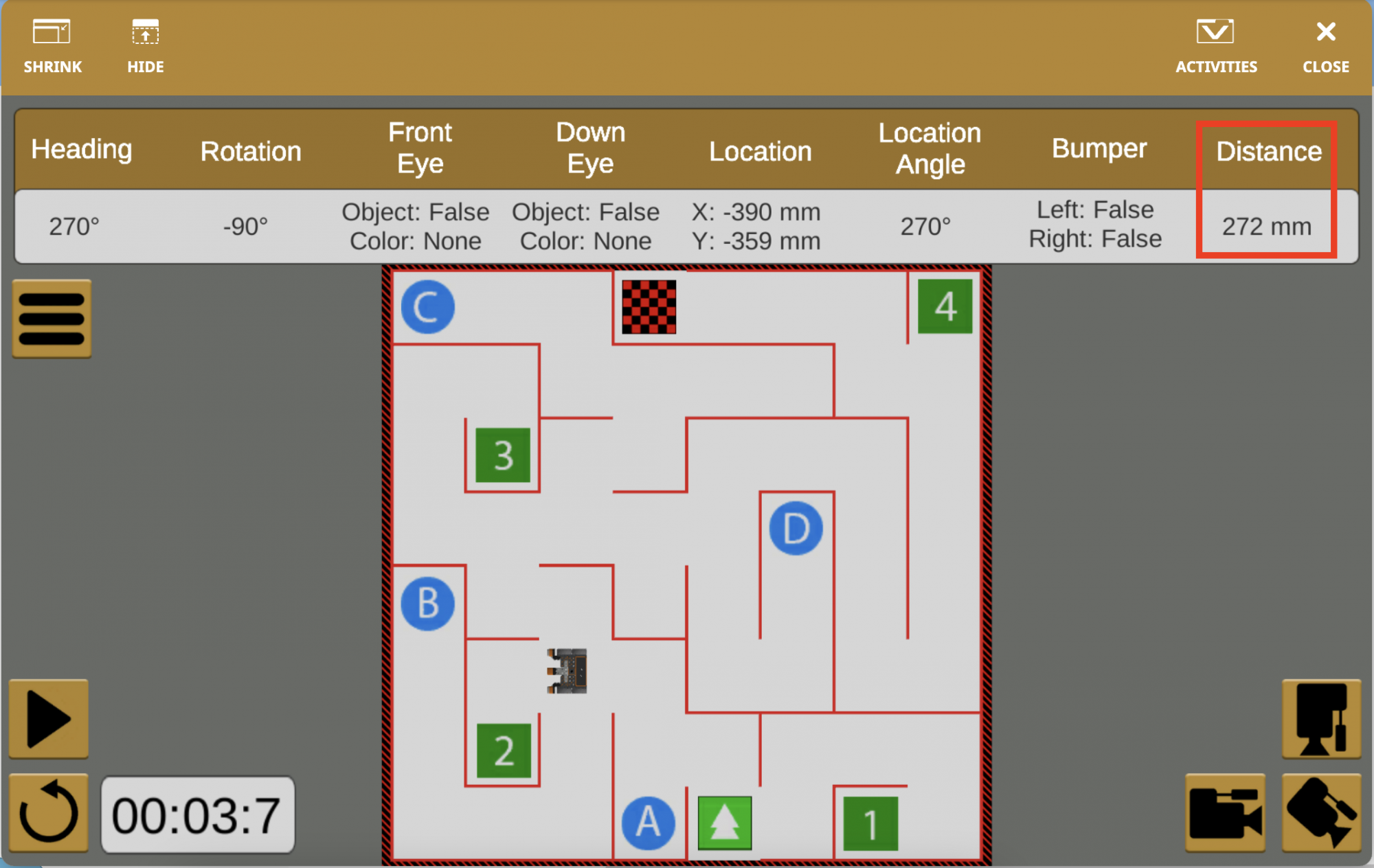
สามารถหยุดโครงการ VEXcode VR ขณะทำงานได้ เมื่อหยุดแล้วค่าในแดชบอร์ดจะแสดงค่าเซ็นเซอร์จาก VR Robot ในเวลาที่หยุดทำงาน สิ่งนี้สามารถใช้เพื่อสังเกตค่าเซ็นเซอร์เช่นเดียวกับการมองเห็นระยะห่างระหว่างหุ่นยนต์ VR และวัตถุในช่วงเวลาหนึ่ง
-
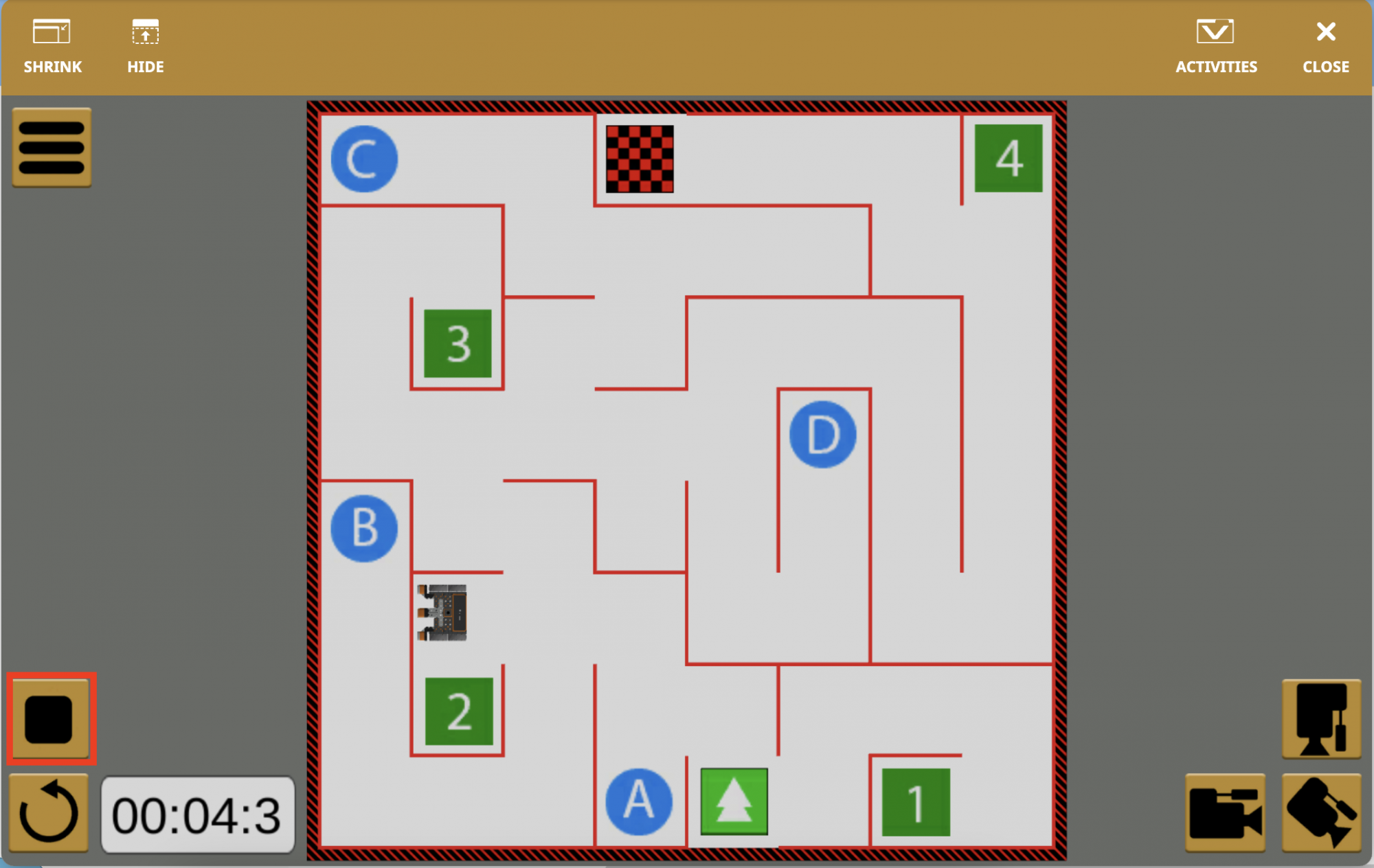
หยุดโครงการเมื่อหุ่นยนต์ VR ถึงจุดผิดพลาดเพื่อดูว่าควรตั้งค่าใหม่ใน <Less than> บล็อกใด
-
ค่าของบล็อก [รอจนกว่า] นี้จะต้องเปลี่ยนเพื่อให้หุ่นยนต์ VR สามารถขับไปยังตัวอักษร ‘B‘ ได้สำเร็จ

สำหรับข้อมูลของคุณ
นอกจากนี้ยังสามารถตรวจสอบค่าที่รายงานโดยเซ็นเซอร์ระยะทางได้ในคอนโซลมอนิเตอร์ การตรวจสอบค่าเซ็นเซอร์ในคอนโซลมอนิเตอร์ช่วยให้ผู้ใช้สามารถดูรายงานแบบเรียลไทม์ของค่าเฉพาะ (หรือหลายค่า) ในโครงการ เข้าถึงหน้าต่างการตรวจสอบโดยเลือกไอคอนการตรวจสอบที่อยู่ถัดจากความช่วยเหลือ

ในโครงการนี้คอนโซลมอนิเตอร์สามารถใช้เพื่อดูค่าที่ถูกรายงานโดยบล็อก (ระยะห่างจาก) เพื่อช่วยในการกำหนดเวลาที่หุ่นยนต์ VR จำเป็นต้องหันไปขับรถผ่าน Wall Maze Playgroundได้สำเร็จ ดูวิดีโอด้านล่างเพื่อดูตัวอย่างการใช้คอนโซลมอนิเตอร์เพื่อดูข้อมูลระยะทางสดจากหุ่นยนต์ VR
บล็อกจากหมวดการตรวจจับในกล่องเครื่องมือสามารถเพิ่มลงในคอนโซลมอนิเตอร์ได้โดยการเลือกและลากบล็อกไปยังไอคอนคอนคอนโซลมอนิเตอร์ในพื้นที่ทำงาน หากต้องการลบค่าเซ็นเซอร์ออกจากคอนโซลมอนิเตอร์ให้เลือกไอคอน 'X' ดูวิดีโอด้านล่างเพื่อดูวิธีลากและวางบล็อกการตรวจจับลงบนไอคอนคอนคอนโซลหน้าจอเพื่อเพิ่มลงในรายการเซ็นเซอร์
- การเปลี่ยนพารามิเตอร์ <Less than> บล็อกเป็น 300 จะเป็นการสั่งให้หุ่นยนต์ VR เลี้ยวซ้ายเมื่อเซ็นเซอร์ระยะทางรายงานว่าหุ่นยนต์ VR อยู่ห่างจากผนังถัดไปน้อยกว่า 300 มิลลิเมตร (มม.)

-
เปิด Wall Maze Playground หากยังไม่เปิดและเรียกใช้โครงการอีกครั้ง

- ตอนนี้หุ่นยนต์ VR ขับเคลื่อนจากจุดเริ่มต้นของ Wall Maze Playground และหยุดบนตัวอักษร ‘B’
- โปรดสังเกตว่าการเปลี่ยนพารามิเตอร์ <Less than> บล็อกเป็น 300 มิลลิเมตรทำให้หุ่นยนต์ VR สามารถหมุนได้ในระยะที่ไกลจากผนังซึ่งจำเป็นต้องหมุนในตำแหน่งที่ถูกต้อง
- ค่าระยะทางที่รายงานในแดชบอร์ดถูกใช้เพื่อสังเกตระยะทางที่หุ่นยนต์ VR อยู่ห่างจากกำแพงเมื่อจำเป็นต้องหันไปที่ตัวอักษร ‘B’
เลือกปุ่ม ถัดไป เพื่อดำเนินการกับบทเรียนส่วนที่เหลือนี้ต่อไป