
Lección 3: Gire a la izquierda para alcanzar la letra "B"
Para su información
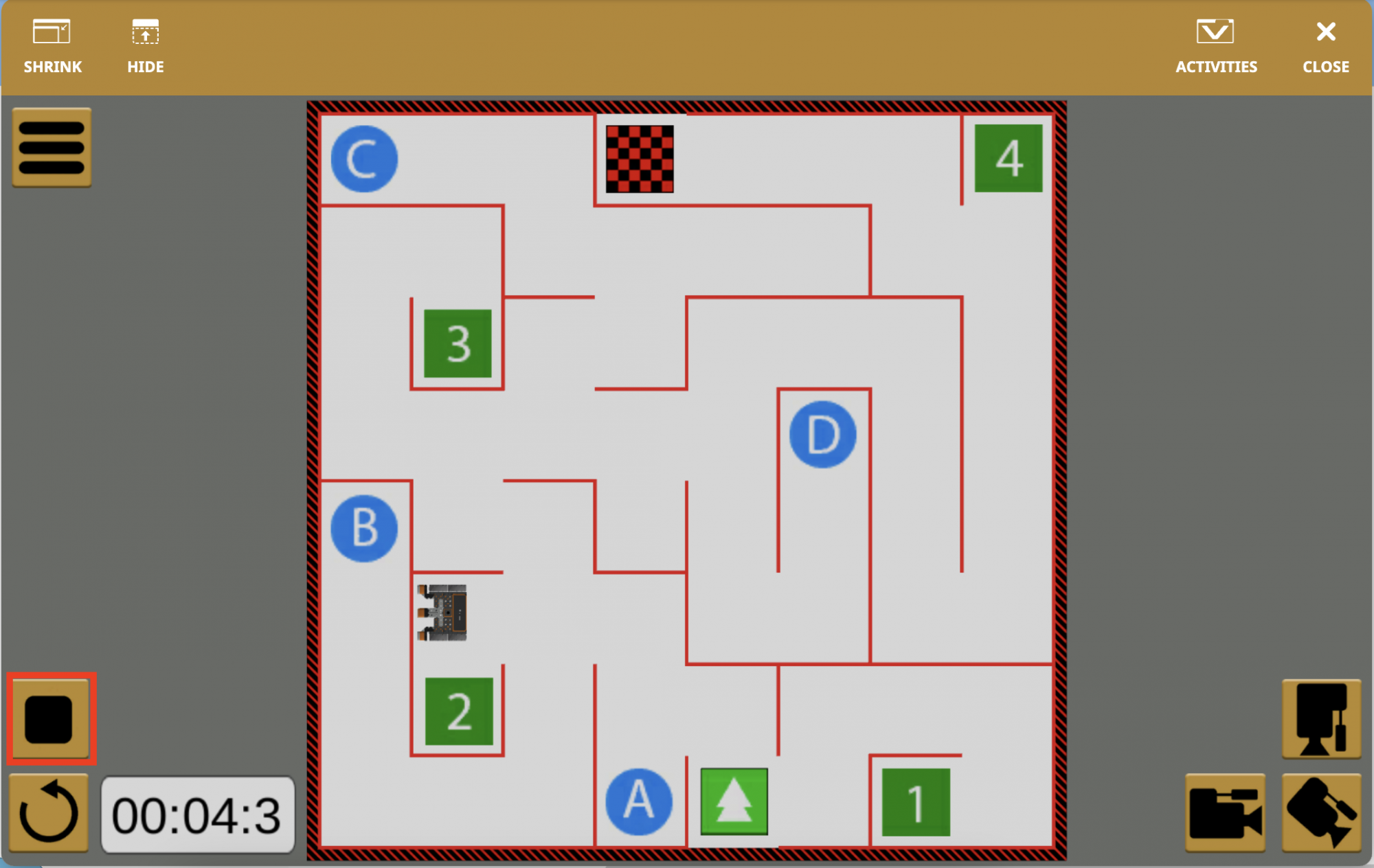
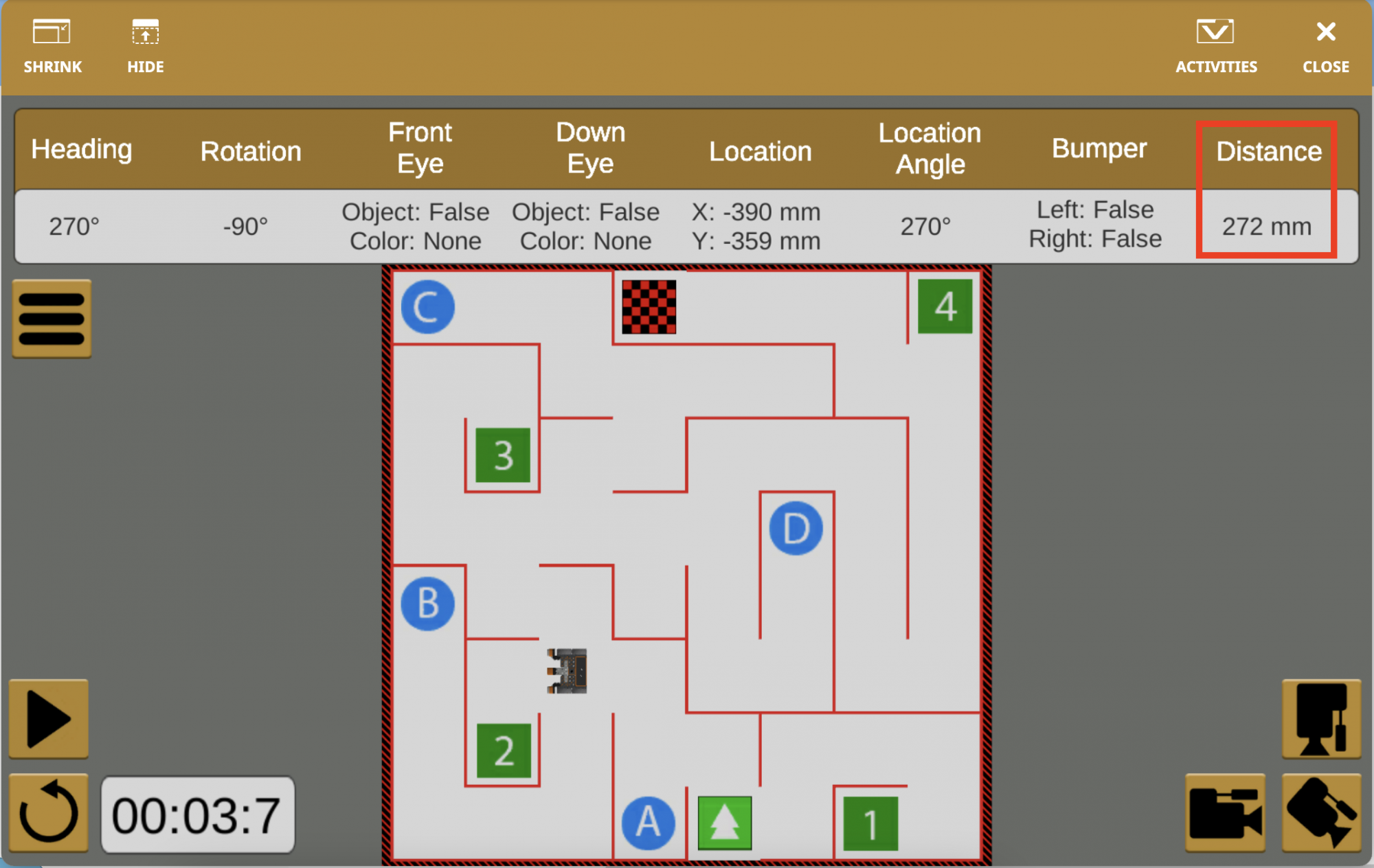
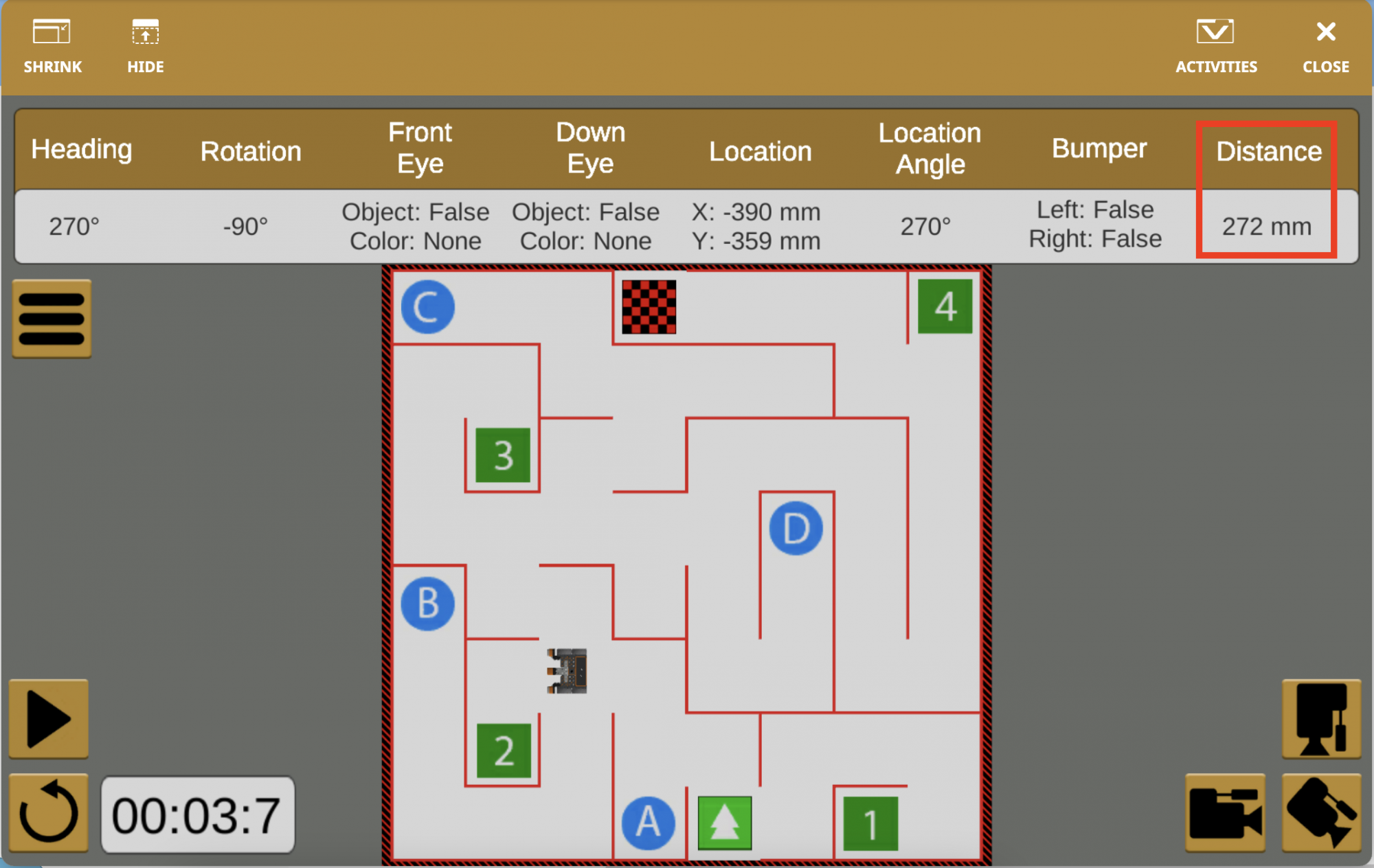
Un proyecto VEXcode VR se puede detener mientras se ejecuta. Una vez detenido, los valores en el Panel de control mostrarán los valores del sensor del Robot VR en el momento en que se detuvo. Esto se puede utilizar para observar los valores del sensor, así como para visualizar la distancia entre el robot VR y un objeto en un momento determinado.
-
Detenga el proyecto cuando el robot VR llegue al punto de error para ver qué nuevo valor debe establecerse en el <Less than> bloque.
-
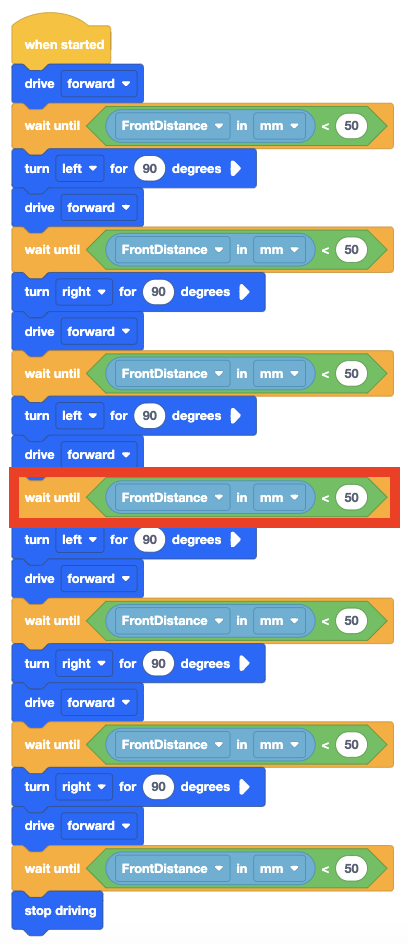
El valor de este bloque [Esperar hasta] deberá cambiar para que el robot VR conduzca con éxito a la letra ‘B.’
Para su información
Los valores informados por el sensor de distancia también se pueden monitorear en la consola del monitor. El monitoreo de los valores del sensor en la Consola del monitor permite al usuario ver informes en tiempo real de un valor específico (o varios valores) en un proyecto. Acceda a la ventana Monitor seleccionando el icono Monitor junto a la Ayuda.

En este proyecto, la Consola del monitor se puede utilizar para ver los valores informados por el bloque (Distancia desde) para ayudar a determinar cuándo el robot VR necesita girar para conducir con éxito a través del patio de recreo del laberinto de pared. Mire el video a continuación para ver un ejemplo de uso de la Consola del monitor para ver datos de distancia en vivo del robot VR.
Los bloques de la categoría Detección en la Caja de herramientas se pueden añadir a la Consola del monitor seleccionando y arrastrando el bloque al icono de la Consola del monitor en el Espacio de trabajo. Para eliminar los valores del sensor de la Consola del monitor, seleccione el icono 'X'. Vea el siguiente vídeo para ver cómo puede arrastrar y soltar los bloques de detección en el icono de la Consola del monitor para añadirlos a la lista de sensores.
- Cambiar el parámetro de <Less than> bloqueo a 300 indicará al robot VR que gire a la izquierda una vez que el sensor de distancia informe que el robot VR está a menos de 300 milímetros (mm) de la siguiente pared.

-
Inicie el Wall Maze Playground si aún no está abierto y vuelva a ejecutar el proyecto.

- El robot de realidad virtual ahora conduce desde el inicio del patio de recreo del laberinto de paredes y se detiene en la letra "B".
- Tenga en cuenta que cambiar el parámetro de <Less than> bloqueo a 300 milímetros permitió que el robot VR girara a una distancia más alejada de la pared, lo que fue necesario para girar en la ubicación correcta.
- El valor de distancia informado en el panel de control se utilizó para observar qué tan lejos estaba el robot de realidad virtual de una pared cuando necesitaba girar para llegar a la letra "B".
Seleccione el botón Siguiente para continuar con el resto de esta lección.