
പാഠം 3: 'B' എന്ന അക്ഷരത്തിൽ എത്താൻ ഇടത്തേക്ക് തിരിയുക.
നിങ്ങളുടെ അറിവിലേക്കായി
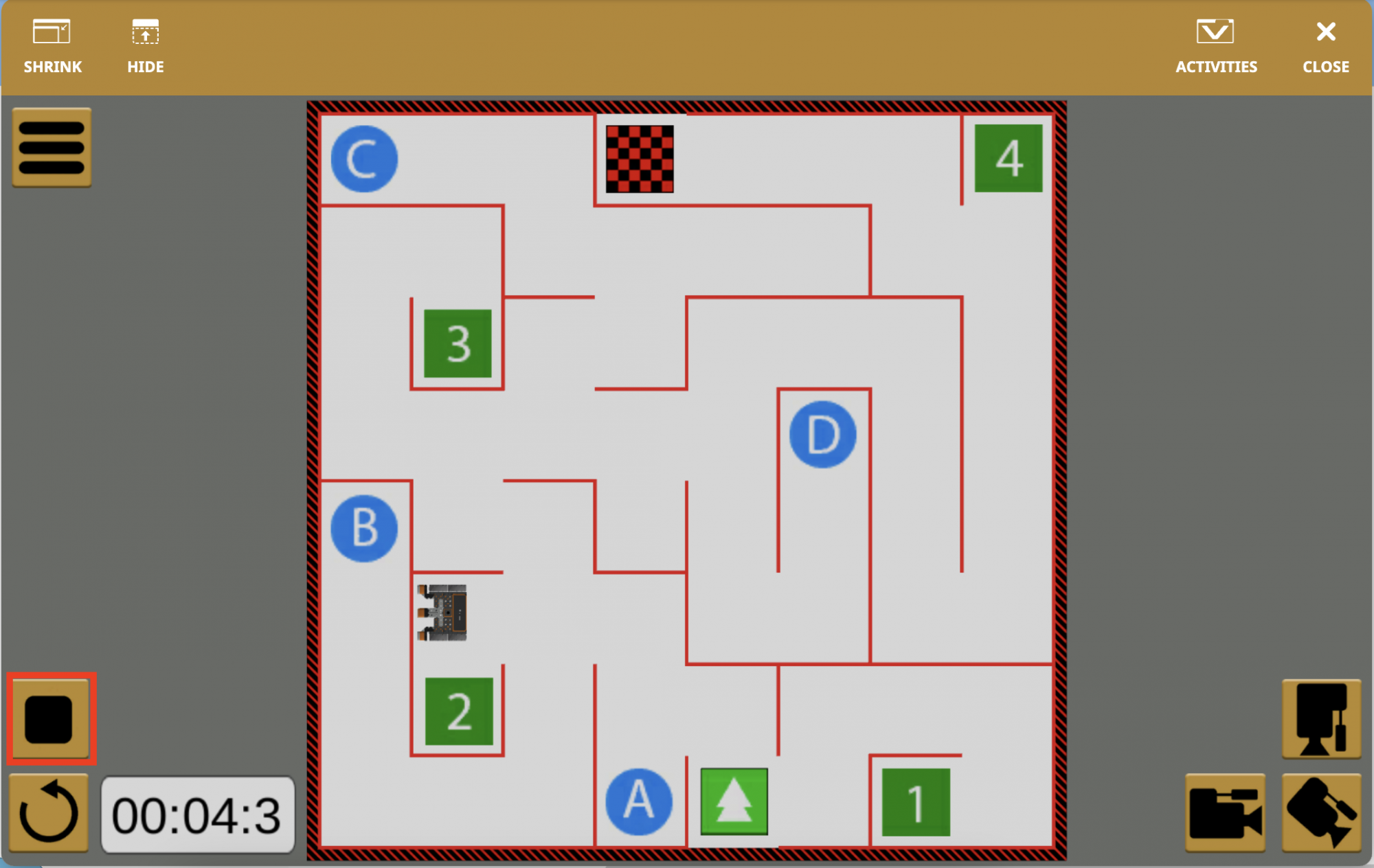
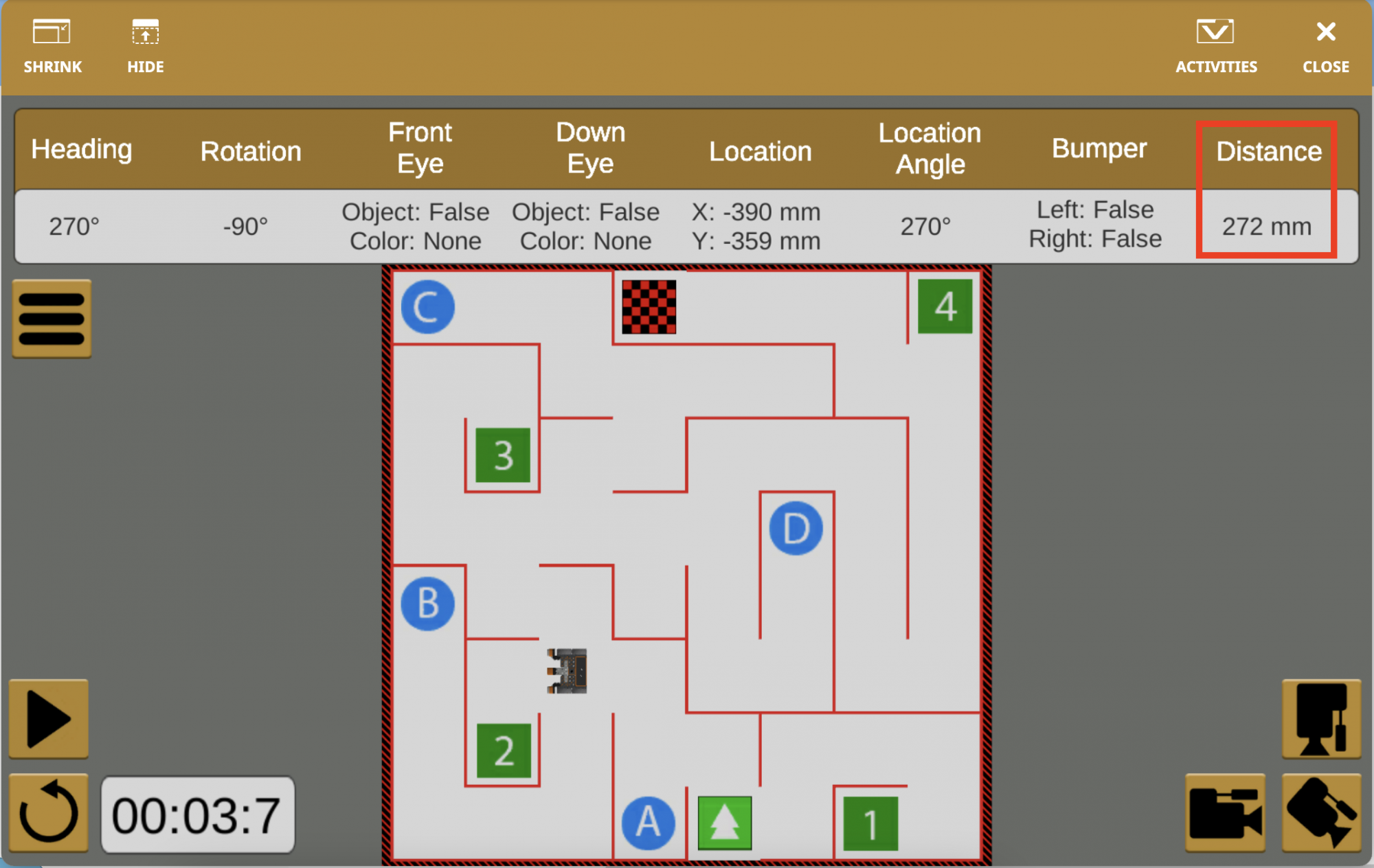
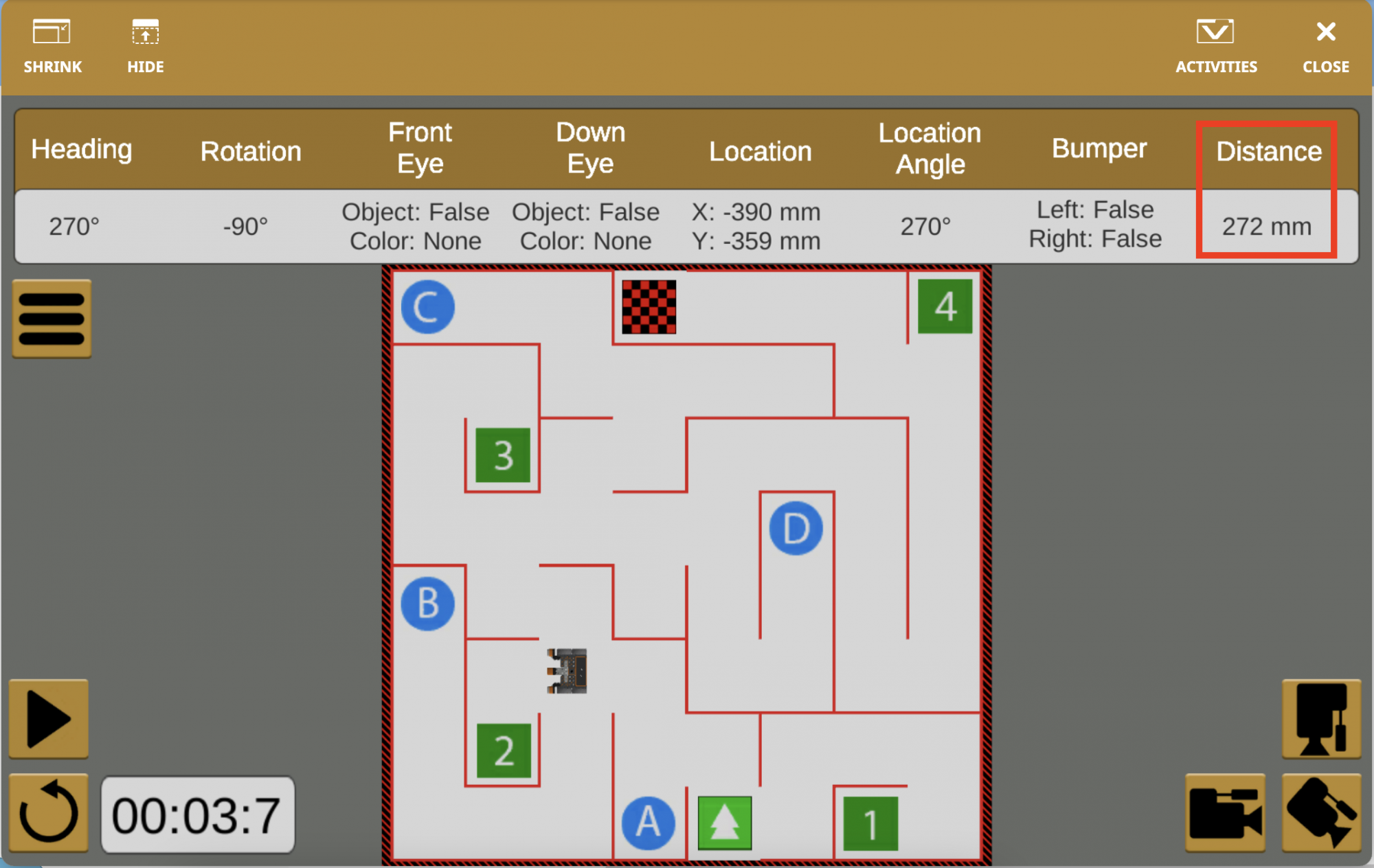
ഒരു VEXcode VR പ്രോജക്റ്റ് പ്രവർത്തിക്കുമ്പോൾ നിർത്താൻ കഴിയും. നിർത്തിക്കഴിഞ്ഞാൽ, ഡാഷ്ബോർഡിലെ മൂല്യങ്ങൾ VR റോബോട്ടിൽ നിന്നുള്ള സെൻസർ മൂല്യങ്ങൾ അത് നിർത്തിയ സമയത്ത് പ്രദർശിപ്പിക്കും. ഇത് സെൻസർ മൂല്യങ്ങൾ നിരീക്ഷിക്കുന്നതിനും ഒരു നിശ്ചിത സമയത്ത് വിആർ റോബോട്ടും ഒരു വസ്തുവും തമ്മിലുള്ള ദൂരം ദൃശ്യവൽക്കരിക്കുന്നതിനും ഉപയോഗിക്കാം.
-
<Less than> ബ്ലോക്കിൽ എന്ത് പുതിയ മൂല്യം സജ്ജമാക്കണമെന്ന് കാണാൻ VR റോബോട്ട് പിശക് പോയിന്റിൽ എത്തുമ്പോൾ പ്രോജക്റ്റ് നിർത്തുക.
-
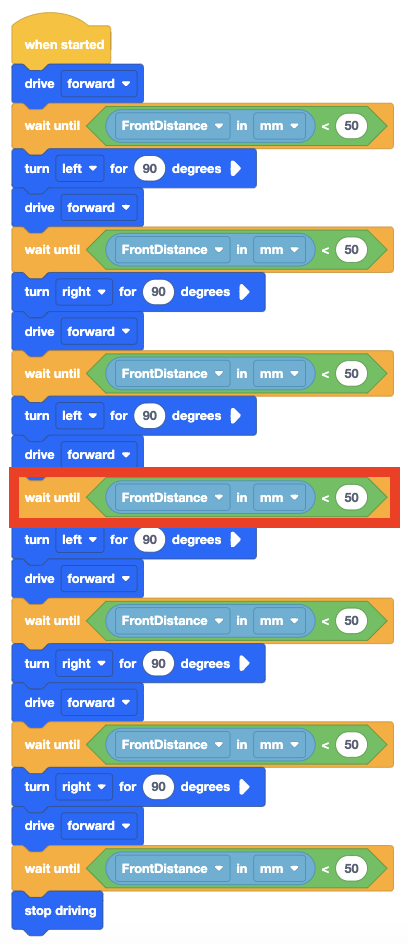
VR റോബോട്ട് 'B' എന്ന അക്ഷരത്തിലേക്ക് വിജയകരമായി ഡ്രൈവ് ചെയ്യുന്നതിന് ഈ [Wait until] ബ്ലോക്കിന്റെ മൂല്യം മാറേണ്ടതുണ്ട്.
നിങ്ങളുടെ അറിവിലേക്കായി
ഡിസ്റ്റൻസ് സെൻസർ റിപ്പോർട്ട് ചെയ്യുന്ന മൂല്യങ്ങൾ മോണിറ്റർ കൺസോളിലും നിരീക്ഷിക്കാൻ കഴിയും. മോണിറ്റർ കൺസോളിലെ സെൻസർ മൂല്യങ്ങൾ നിരീക്ഷിക്കുന്നത്, ഒരു പ്രോജക്റ്റിലെ ഒരു നിർദ്ദിഷ്ട മൂല്യത്തിന്റെ (അല്ലെങ്കിൽ ഒന്നിലധികം മൂല്യങ്ങളുടെ) തത്സമയ റിപ്പോർട്ടുകൾ കാണാൻ ഉപയോക്താവിനെ അനുവദിക്കുന്നു. സഹായത്തിന് അടുത്തുള്ള മോണിറ്റർ ഐക്കൺ തിരഞ്ഞെടുത്ത് മോണിറ്റർ വിൻഡോയിലേക്ക് പ്രവേശിക്കുക.

ഈ പ്രോജക്റ്റിൽ, വാൾ മെയ്സ് പ്ലേഗ്രൗണ്ട്വിജയകരമായി ഓടിക്കാൻ VR റോബോട്ട് എപ്പോൾ തിരിയണമെന്ന് നിർണ്ണയിക്കാൻ സഹായിക്കുന്നതിന് (Distance from) ബ്ലോക്ക് റിപ്പോർട്ട് ചെയ്യുന്ന മൂല്യങ്ങൾ കാണുന്നതിന് മോണിറ്റർ കൺസോൾ ഉപയോഗിക്കാം. VR റോബോട്ടിൽ നിന്ന് തത്സമയ ദൂര ഡാറ്റ കാണുന്നതിന് മോണിറ്റർ കൺസോൾ ഉപയോഗിക്കുന്നതിന്റെ ഒരു ഉദാഹരണം കാണാൻ താഴെയുള്ള വീഡിയോ കാണുക.
ടൂൾ ബോക്സിലെ സെൻസിംഗ് വിഭാഗത്തിൽ നിന്നുള്ള ബ്ലോക്കുകൾ, വർക്ക്സ്പെയ്സിലെ മോണിറ്റർ കൺസോൾ ഐക്കണിലേക്ക് ബ്ലോക്ക് തിരഞ്ഞെടുത്ത് വലിച്ചിടുന്നതിലൂടെ മോണിറ്റർ കൺസോളിലേക്ക് ചേർക്കാൻ കഴിയും. മോണിറ്റർ കൺസോളിൽ നിന്ന് സെൻസർ മൂല്യങ്ങൾ നീക്കം ചെയ്യാൻ, 'X' ഐക്കൺ തിരഞ്ഞെടുക്കുക. സെൻസറുകളുടെ പട്ടികയിലേക്ക് സെൻസിംഗ് ബ്ലോക്കുകൾ എങ്ങനെ ചേർക്കാമെന്ന് കാണാൻ താഴെയുള്ള വീഡിയോ കാണുക. മോണിറ്റർ കൺസോൾ ഐക്കണിലേക്ക് സെൻസിംഗ് ബ്ലോക്കുകൾ എങ്ങനെ വലിച്ചിടാമെന്ന് മനസ്സിലാക്കുക.
- <Less than> ബ്ലോക്ക് പാരാമീറ്റർ 300 ആക്കി മാറ്റുന്നത്, അടുത്ത ഭിത്തിയിൽ നിന്ന് VR റോബോട്ട് 300 മില്ലിമീറ്ററിൽ (മില്ലീമീറ്റർ) താഴെയാണെന്ന് ഡിസ്റ്റൻസ് സെൻസർ റിപ്പോർട്ട് ചെയ്തുകഴിഞ്ഞാൽ, VR റോബോട്ടിനോട് ഇടത്തേക്ക് തിരിയാൻ നിർദ്ദേശിക്കും.

-
വാൾ മേസ് പ്ലേഗ്രൗണ്ട് തുറന്നിട്ടില്ലെങ്കിൽ അത് സമാരംഭിച്ച് പ്രോജക്റ്റ് വീണ്ടും പ്രവർത്തിപ്പിക്കുക.

- വിആർ റോബോട്ട് ഇപ്പോൾ വാൾ മെയ്സ് പ്ലേഗ്രൗണ്ട് തുടക്കം മുതൽ ഡ്രൈവ് ചെയ്ത് 'B' എന്ന അക്ഷരത്തിൽ നിർത്തുന്നു.
- <Less than> ബ്ലോക്ക് പാരാമീറ്റർ 300 മില്ലിമീറ്ററായി മാറ്റിയത് VR റോബോട്ടിനെ ചുവരിൽ നിന്ന് കൂടുതൽ ദൂരത്തേക്ക് തിരിയാൻ അനുവദിച്ചു, അത് ശരിയായ സ്ഥാനത്ത് തിരിയേണ്ടത് അത്യാവശ്യമായിരുന്നു.
- 'B' എന്ന അക്ഷരത്തിലെത്താൻ തിരിയേണ്ടിവരുമ്പോൾ VR റോബോട്ട് ഒരു മതിലിൽ നിന്ന് എത്ര ദൂരെയാണെന്ന് നിരീക്ഷിക്കാൻ ഡാഷ്ബോർഡിൽ റിപ്പോർട്ട് ചെയ്തിരിക്കുന്ന ദൂര മൂല്യം ഉപയോഗിച്ചു.
ഈ പാഠത്തിന്റെ ബാക്കി ഭാഗം തുടരാൻ അടുത്തത് ബട്ടൺ തിരഞ്ഞെടുക്കുക.