
Leçon 3 : Tournez à gauche pour atteindre la lettre « B ».
Pour votre information
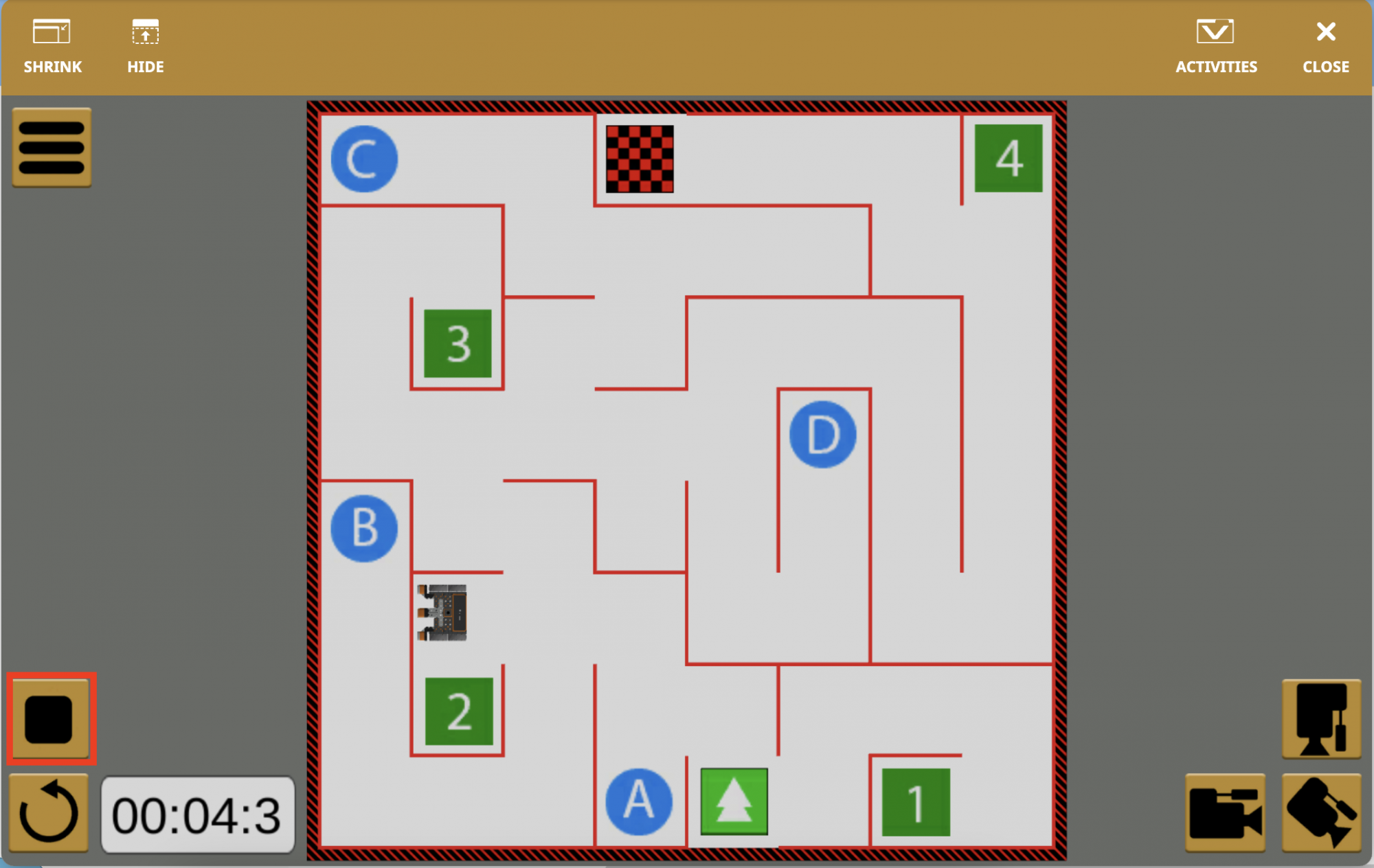
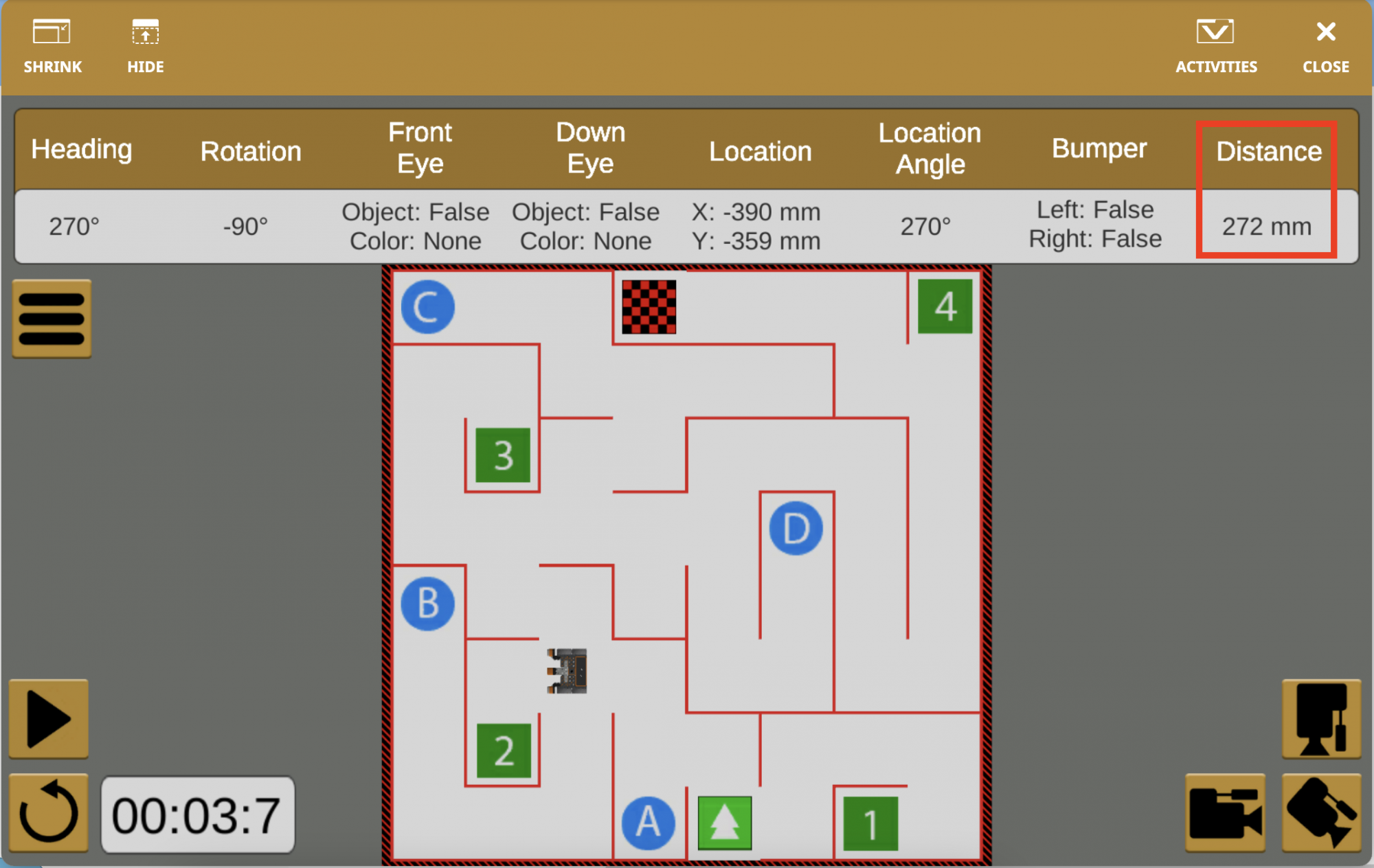
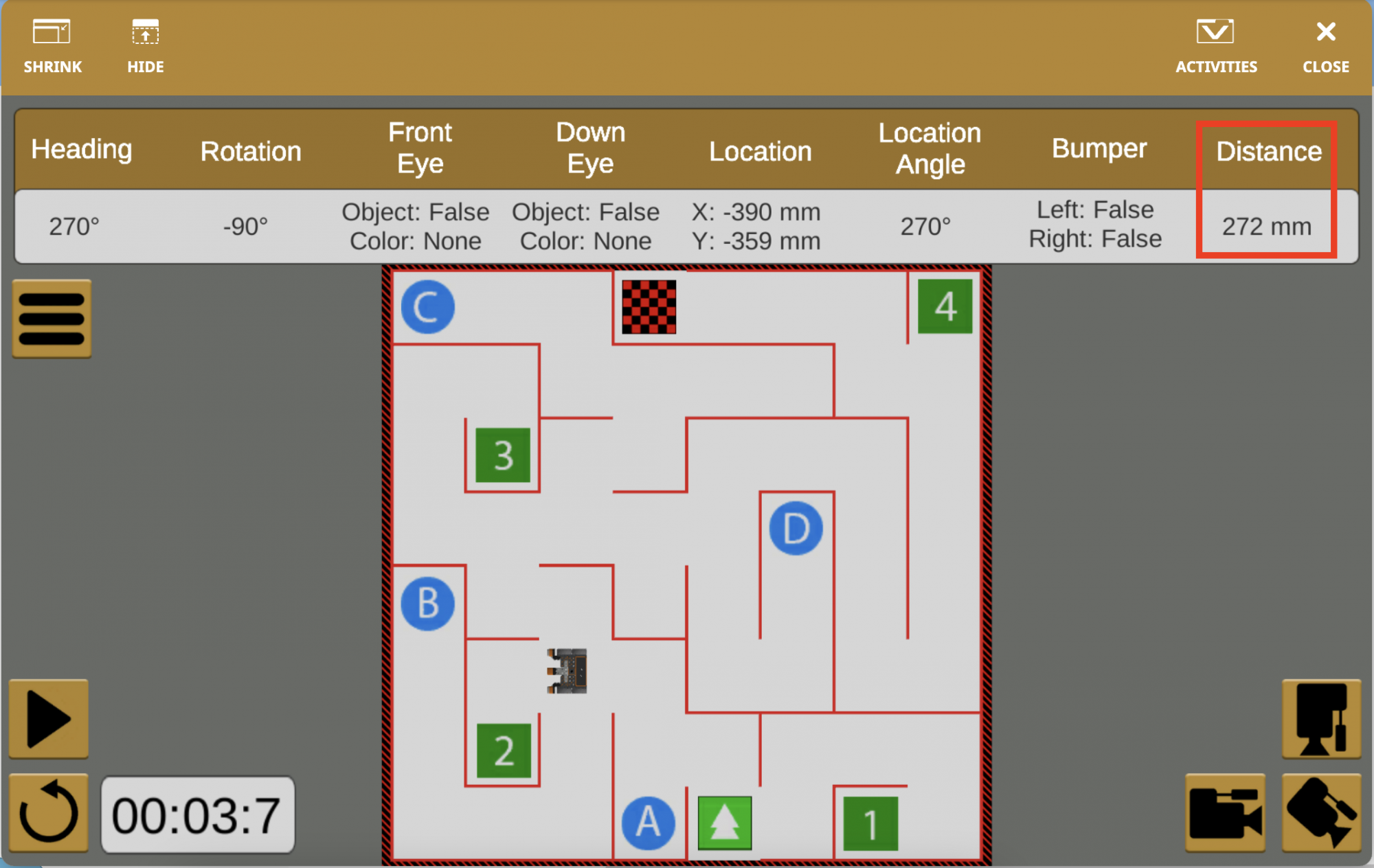
Un projet VEXcode VR peut être arrêté en cours d'exécution. Une fois arrêté, les valeurs du tableau de bord afficheront les valeurs du capteur du robot VR au moment où il a été arrêté. Cela peut être utilisé pour observer les valeurs du capteur ainsi que pour visualiser la distance entre le robot VR et un objet à un certain moment.
-
Arrêtez le projet lorsque le robot VR atteint le point d'erreur pour voir quelle nouvelle valeur doit être définie dans le <Less than> bloc.
-
La valeur de ce bloc [Attendre] devra changer pour que le robot VR puisse conduire avec succès à la lettre « B ».

Pour votre information
Les valeurs rapportées par le capteur de distance peuvent également être surveillées dans la console de surveillance. La surveillance des valeurs des capteurs dans la console de surveillance permet à l'utilisateur d'afficher des rapports en temps réel d'une valeur spécifique (ou de plusieurs valeurs) dans un projet. Accédez à la fenêtre Surveillance en sélectionnant l'icône Surveillance à côté de l'aide.

Dans ce projet, la console de surveillance peut être utilisée pour afficher les valeurs signalées par le bloc (Distance de) afin de déterminer quand le robot VR doit tourner pour traverser avec succès le terrain de jeu du labyrinthe mural. Regardez la vidéo ci-dessous pour voir un exemple d'utilisation de la console de surveillance pour afficher les données de distance en direct du robot VR.
Les blocs de la catégorie Sensation de la boîte à outils peuvent être ajoutés à la console de moniteur en sélectionnant et en faisant glisser le bloc vers l'icône de la console de moniteur dans l'espace de travail. Pour supprimer les valeurs de capteur de la console de surveillance, sélectionnez l'icône « X ». Regardez la vidéo ci-dessous pour voir comment vous pouvez faire glisser et déposer des blocs de détection sur l'icône de la console de surveillance pour les ajouter à la liste des capteurs.
- La modification du paramètre de <Less than> bloc à 300 indiquera au robot VR de tourner à gauche une fois que le capteur de distance signale que le robot VR est à moins de 300 millimètres (mm) du mur suivant.

-
Lancez le terrain de jeu Wall Maze s'il n'est pas déjà ouvert et relancez le projet.

- Le robot VR roule maintenant depuis le début de l'aire de jeux du labyrinthe mural et s'arrête sur la lettre « B ».
- Notez que la modification du paramètre du <Less than> bloc à 300 millimètres a permis au robot VR de tourner à une distance plus éloignée du mur, ce qui était nécessaire pour tourner au bon endroit.
- La valeur de distance indiquée dans le tableau de bord a été utilisée pour observer à quelle distance le robot VR se trouvait d'un mur lorsqu'il devait se tourner pour atteindre la lettre « B ».
Sélectionnez le bouton Suivant pour continuer le reste de cette leçon.