
पाठ 3: अक्षर 'B' तक पहुंचने के लिए बाएं मुड़ें।
आपकी जानकारी के लिए
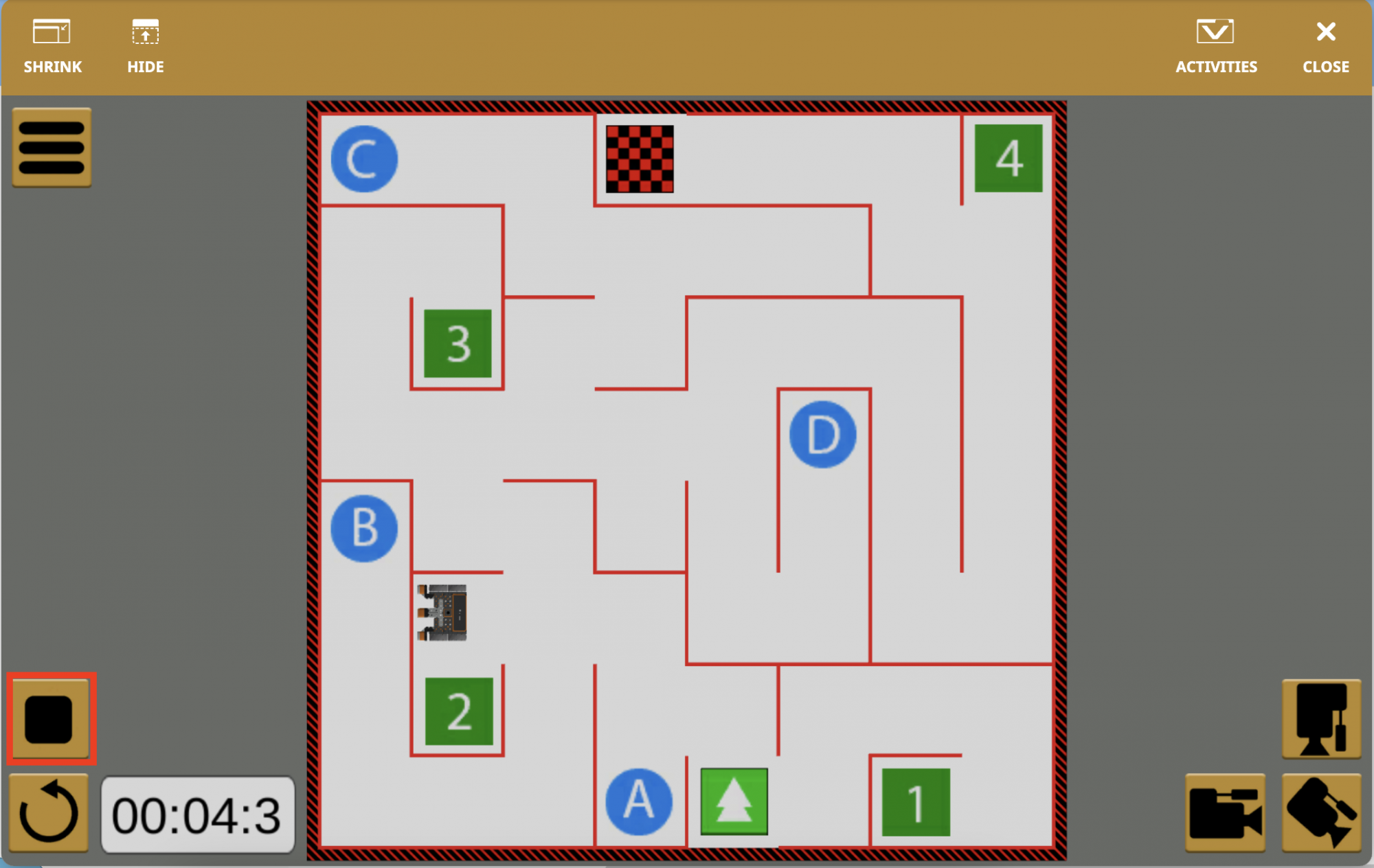
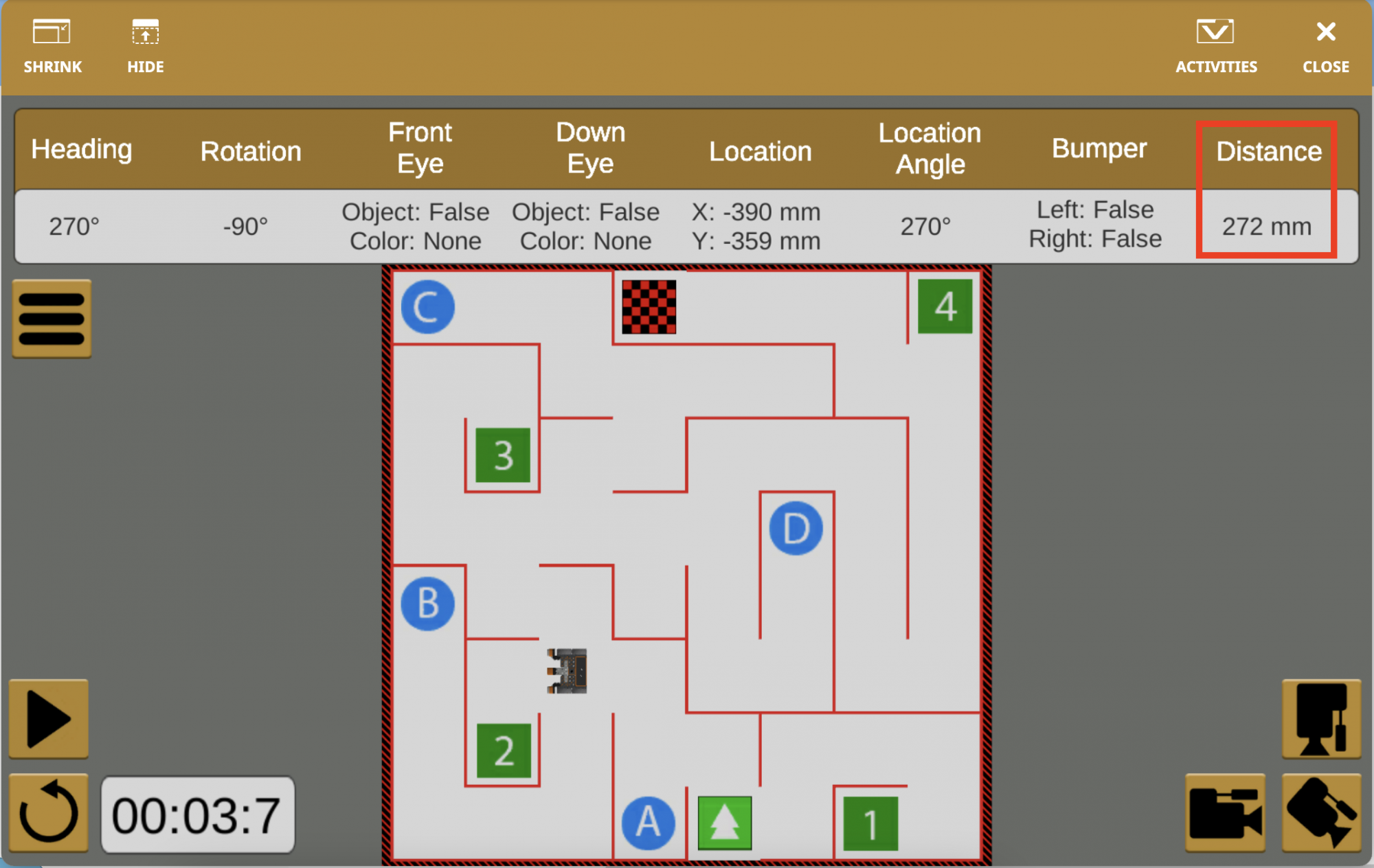
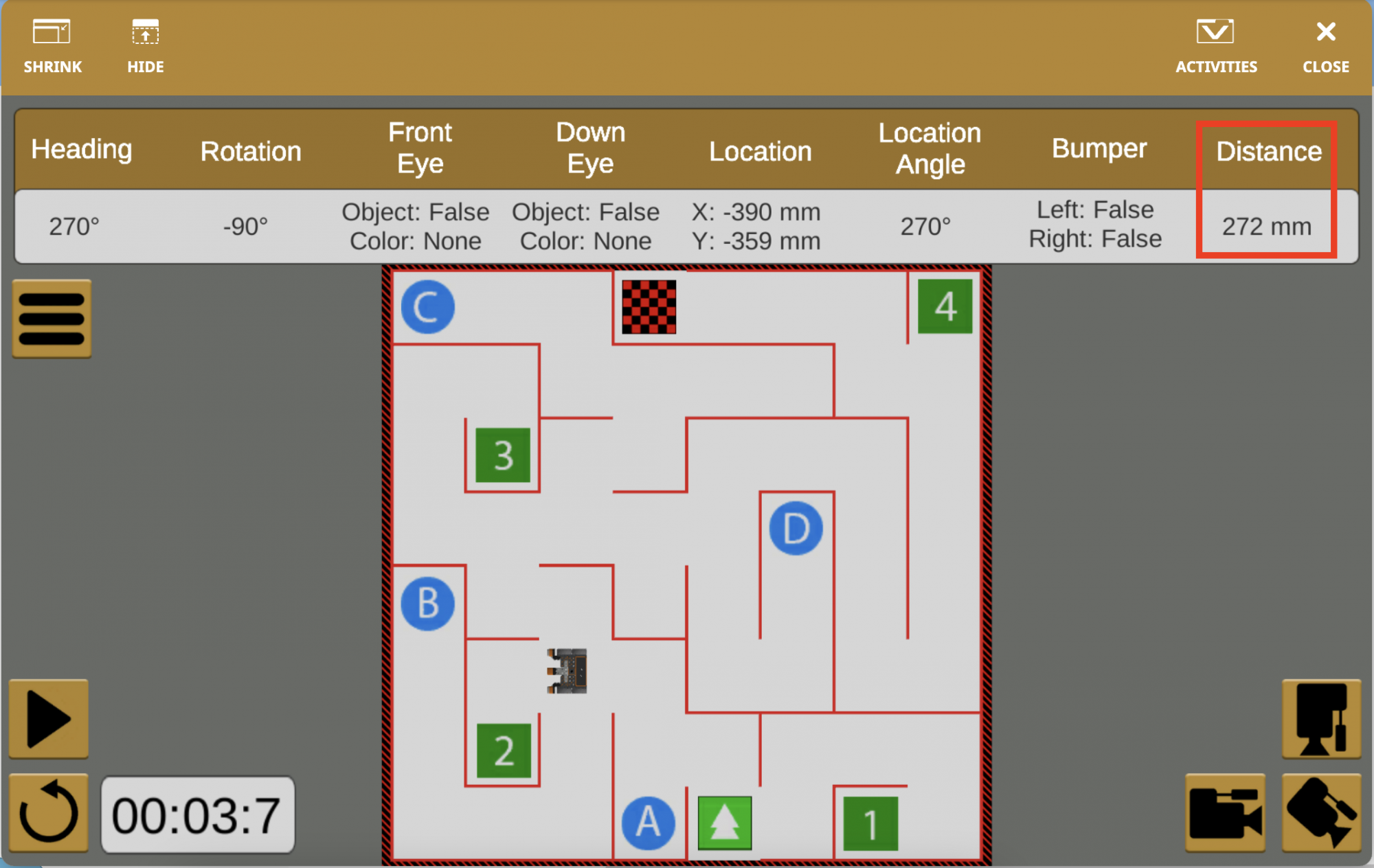
VEXcode VR प्रोजेक्ट को चलते समय रोका जा सकता है। एक बार रोक दिए जाने पर, डैशबोर्ड में मान VR रोबोट के सेंसर मान को उस समय प्रदर्शित करेंगे जब इसे रोका गया था। इसका उपयोग सेंसर मानों का निरीक्षण करने के साथ-साथ किसी निश्चित समय पर वीआर रोबोट और किसी वस्तु के बीच की दूरी को देखने के लिए भी किया जा सकता है।
-
जब VR रोबोट त्रुटि बिंदु पर पहुंच जाए तो प्रोजेक्ट को रोक दें, ताकि यह देखा जा सके कि <Less than> ब्लॉक में कौन सा नया मान सेट किया जाना चाहिए।
-
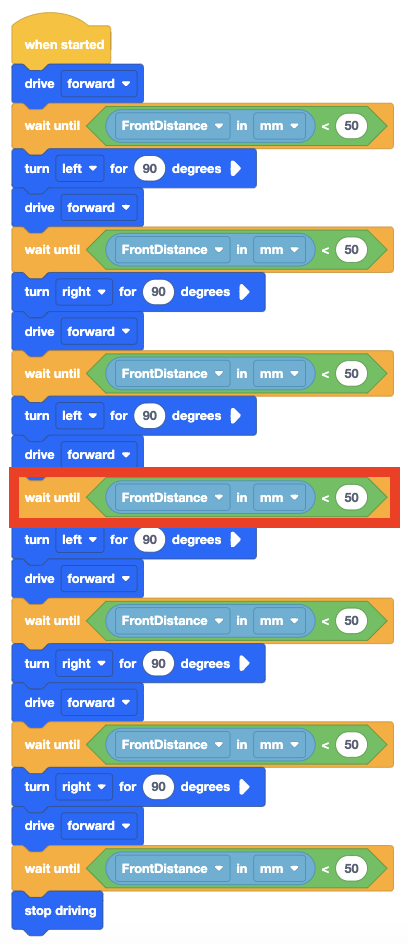
वीआर रोबोट को अक्षर 'बी' तक सफलतापूर्वक पहुंचने के लिए इस [प्रतीक्षा करें] ब्लॉक का मान बदलना होगा।
आपकी जानकारी के लिए
दूरी सेंसर द्वारा रिपोर्ट किए गए मानों की मॉनिटरिंग मॉनिटर कंसोल में भी की जा सकती है। मॉनिटर कंसोल में सेंसर मानों की निगरानी करने से उपयोगकर्ता को किसी प्रोजेक्ट में किसी विशिष्ट मान (या एकाधिक मानों) की वास्तविक समय रिपोर्ट देखने की सुविधा मिलती है। सहायता के बगल में स्थित मॉनिटर आइकन का चयन करके मॉनिटर विंडो तक पहुंचें।

इस परियोजना में, मॉनिटर कंसोल का उपयोग (दूरी से) ब्लॉक द्वारा रिपोर्ट किए जा रहे मानों को देखने के लिए किया जा सकता है ताकि यह निर्धारित करने में मदद मिल सके कि वीआर रोबोट को वॉल भूलभुलैया खेल के मैदानके माध्यम से सफलतापूर्वक ड्राइव करने के लिए कब मुड़ना होगा। वीआर रोबोट से लाइव दूरी डेटा देखने के लिए मॉनिटर कंसोल का उपयोग करने का एक उदाहरण देखने के लिए नीचे दिया गया वीडियो देखें।
टूल बॉक्स में सेंसिंग श्रेणी से ब्लॉक को कार्यस्थान में मॉनिटर कंसोल आइकन पर ब्लॉक का चयन करके और खींचकर मॉनिटर कंसोल में जोड़ा जा सकता है। मॉनिटर कंसोल से सेंसर मान हटाने के लिए, 'X' आइकन का चयन करें। नीचे दिए गए वीडियो को देखें कि आप सेंसिंग ब्लॉक्स को मॉनिटर कंसोल आइकन पर खींचकर कैसे छोड़ सकते हैं, ताकि उन्हें सेंसर्स की सूची में जोड़ा जा सके।
- <Less than> ब्लॉक पैरामीटर को 300 में बदलने से वीआर रोबोट को बाईं ओर मुड़ने का निर्देश मिलेगा, जब दूरी सेंसर रिपोर्ट करेगा कि वीआर रोबोट अगली दीवार से 300 मिलीमीटर (मिमी) से कम दूरी पर है।

-
यदि वॉल मेज़ प्लेग्राउंड पहले से खुला नहीं है तो उसे लॉन्च करें और प्रोजेक्ट को पुनः चलाएं।

- वीआर रोबोट अब वॉल मेज़ प्लेग्राउंड के प्रारंभ से चलता है और अक्षर 'बी' पर रुकता है।
- ध्यान दें कि <Less than> ब्लॉक पैरामीटर को 300 मिलीमीटर में बदलने से वीआर रोबोट दीवार से अधिक दूरी पर मुड़ सकता है, जो सही स्थान पर मुड़ने के लिए आवश्यक था।
- डैशबोर्ड में बताए गए दूरी मान का उपयोग यह देखने के लिए किया गया कि जब वीआर रोबोट को अक्षर 'बी' तक पहुंचने के लिए मुड़ना था, तो वह दीवार से कितनी दूरी पर था।
इस पाठ के शेष भाग को जारी रखने के लिए अगला बटन का चयन करें।