
Lezione 3: Gira a sinistra per raggiungere la lettera "B".
Per tua informazione
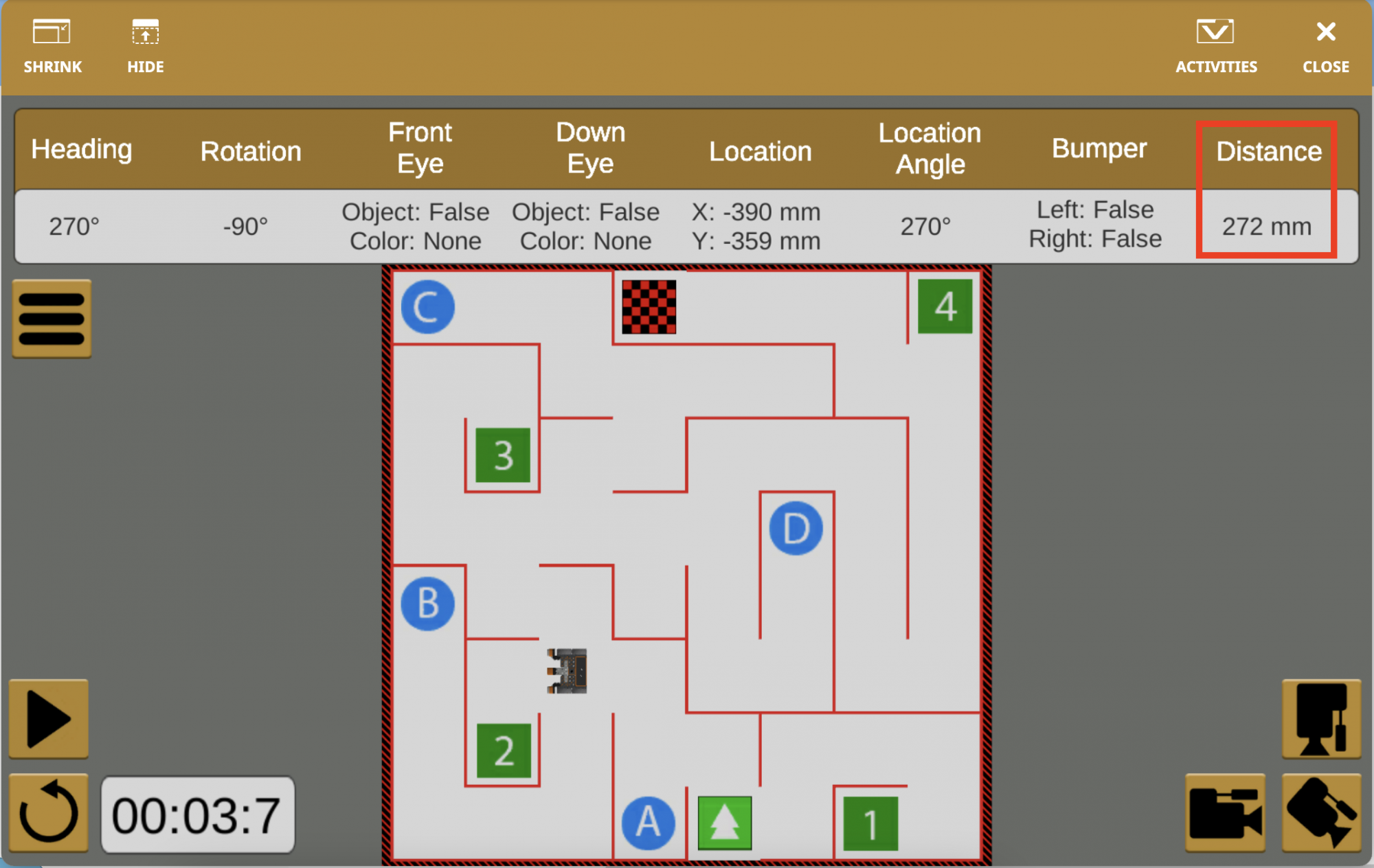
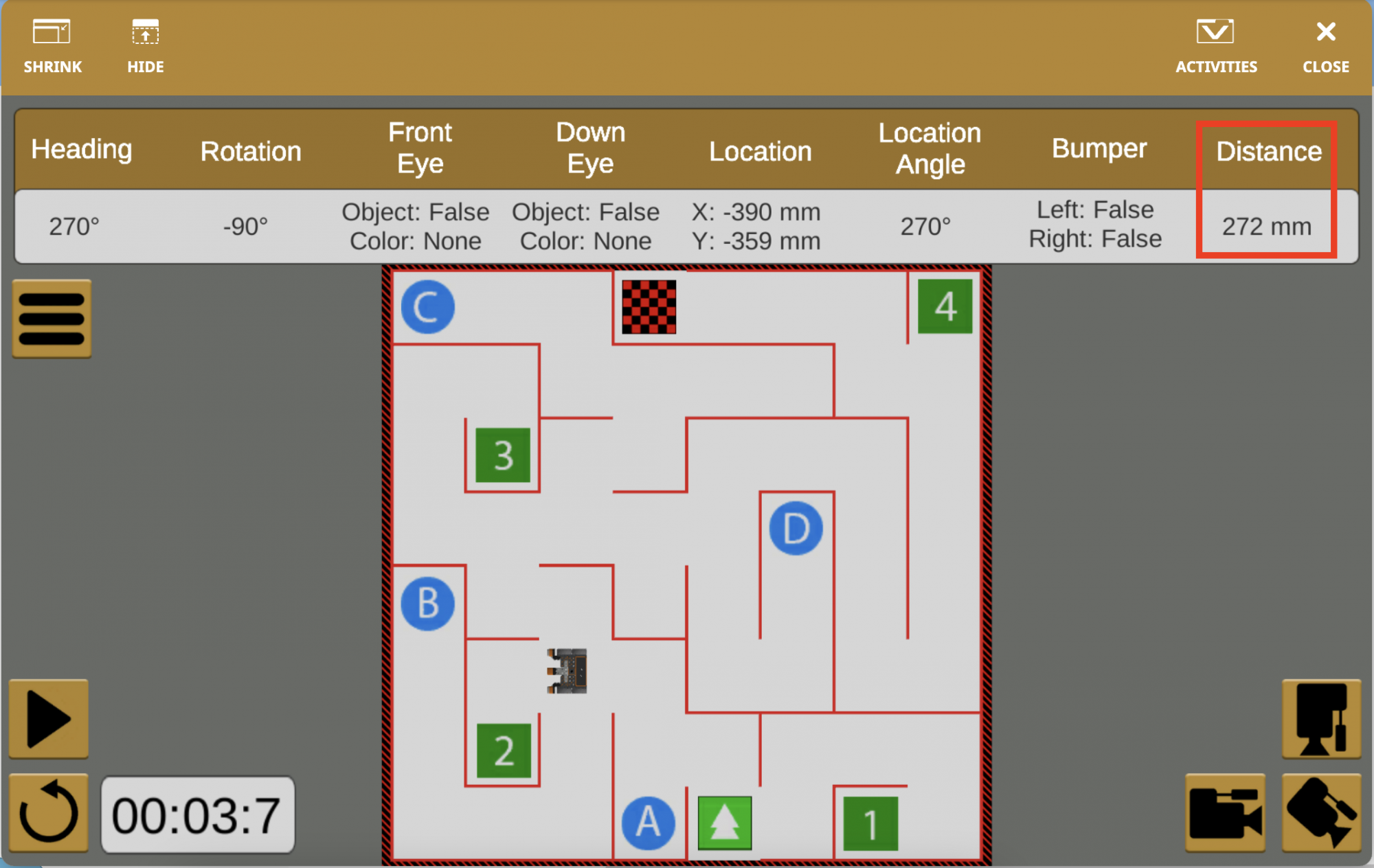
Un progetto VEXcode VR può essere interrotto durante l'esecuzione. Una volta arrestati, i valori nella Dashboard visualizzeranno i valori del sensore dal robot VR nel momento in cui è stato arrestato. Questo può essere utilizzato per osservare i valori dei sensori e visualizzare la distanza tra il robot VR e un oggetto in un determinato momento.
-
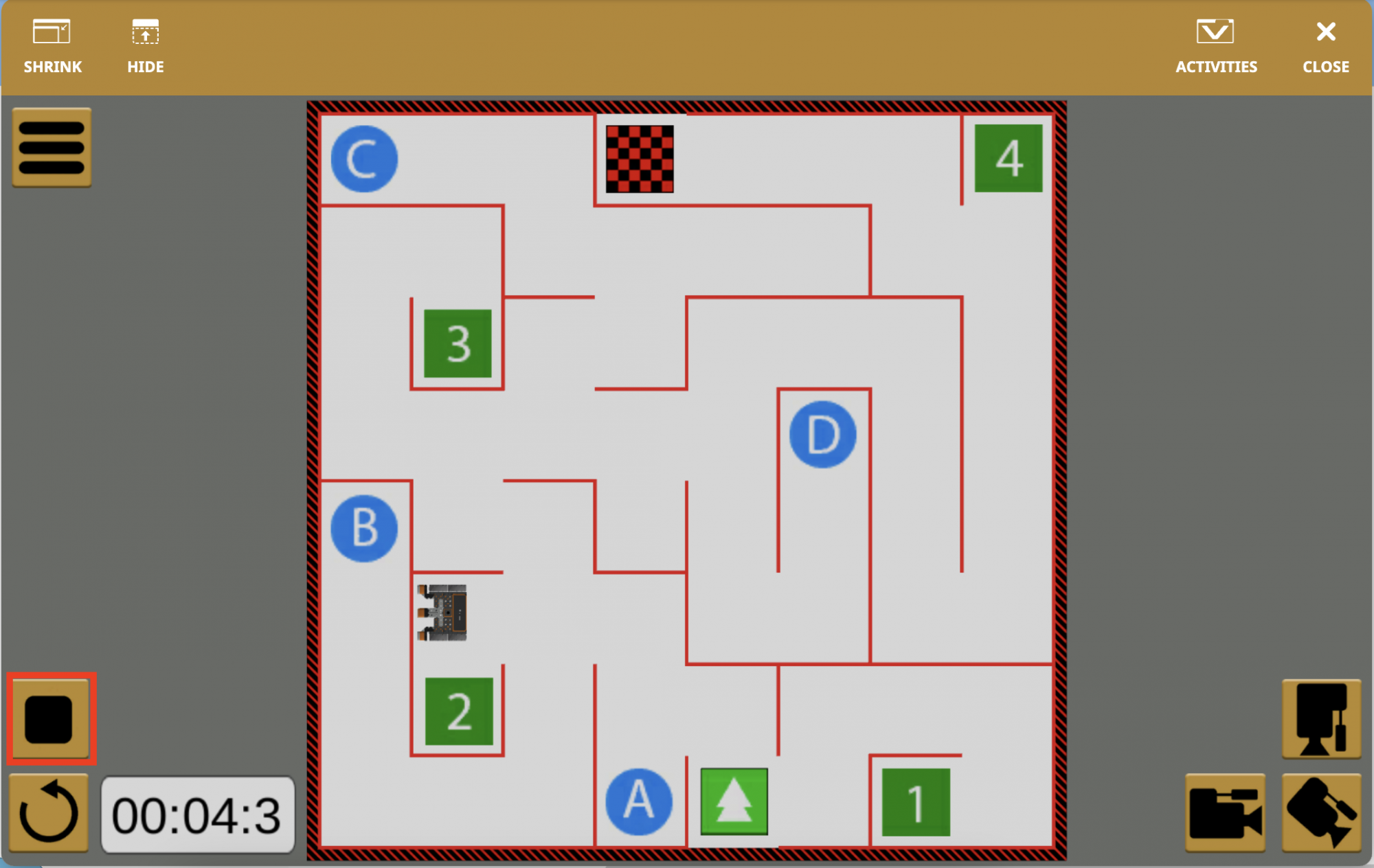
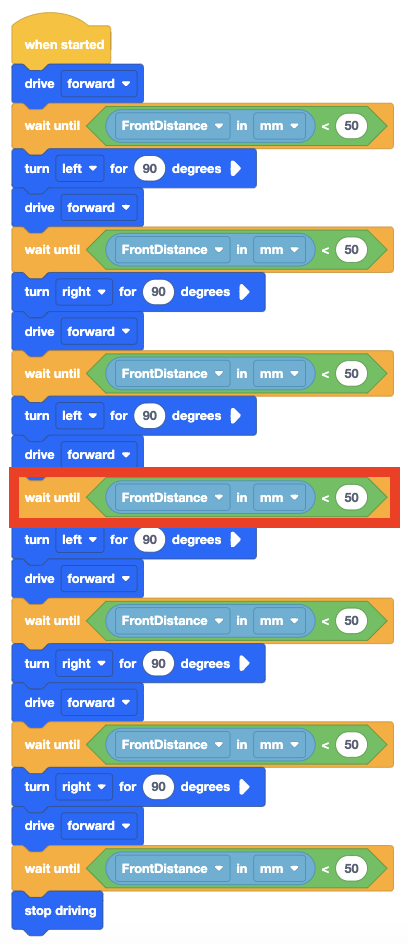
Arrestare il progetto quando il robot VR raggiunge il punto di errore per vedere quale nuovo valore deve essere impostato nel <Less than> blocco.
-
Il valore di questo blocco [Attendi fino a] dovrà essere modificato affinché il robot VR raggiunga con successo la lettera "B".
Per tua informazione
I valori riportati dal sensore di distanza possono essere monitorati anche nella console del monitor. Il monitoraggio dei valori dei sensori nella Console Monitor consente all'utente di visualizzare report in tempo reale di un valore specifico (o più valori) in un progetto. Accedere alla finestra Monitor selezionando l'icona Monitor accanto alla Guida.

In questo progetto, la Console Monitor può essere utilizzata per visualizzare i valori riportati dal blocco (Distanza da) per aiutare a determinare quando il Robot VR deve girare per attraversare con successo il Parco Giochi del Labirinto a Parete. Guarda il video qui sotto per vedere un esempio di utilizzo della Console Monitor per visualizzare i dati di distanza in tempo reale dal robot VR.
I blocchi della categoria Rilevamento nella casella degli strumenti possono essere aggiunti alla console del monitor selezionando e trascinando il blocco sull'icona della console del monitor nell'area di lavoro. Per rimuovere i valori del sensore dalla console del monitor, selezionare l'icona "X". Guarda il video qui sotto per vedere come puoi trascinare i blocchi di rilevamento sull'icona della Console Monitor per aggiungerli all'elenco dei sensori.
- La modifica del parametro di <Less than> blocco a 300 indicherà al robot VR di girare a sinistra una volta che il sensore di distanza segnala che il robot VR si trova a meno di 300 millimetri (mm) di distanza dalla parete successiva.

-
Avviare il Wall Maze Playground se non è già aperto ed eseguire nuovamente il progetto.

- Il robot VR ora guida dall'inizio del Wall Maze Playground e si ferma sulla lettera "B".
- Si noti che la modifica del parametro di <Less than> blocco a 300 millimetri ha permesso al robot VR di girare a una distanza maggiore dalla parete, il che era necessario per girare nella posizione corretta.
- Il valore della distanza riportato nel cruscotto è stato utilizzato per osservare la distanza del robot VR da un muro quando doveva girare per raggiungere la lettera "B".
Selezionare il pulsante Avanti per continuare con il resto della lezione.