
പാഠം 3: ഡിസ്കുകൾ എടുക്കലും നീക്കലും
മുൻ പാഠത്തിൽ, VR റോബോട്ടിനൊപ്പം ഡിസ്ക് മൂവർ പ്ലേഗ്രൗണ്ട് ൽ ഡിസ്കുകൾ എടുത്ത് നീക്കാൻ നിങ്ങൾ [എനർജൈസ് ഇലക്ട്രോമാഗ്നറ്റ്] ബ്ലോക്കും ഡ്രൈവ്ട്രെയിൻ ബ്ലോക്കുകളും ഉപയോഗിച്ചു. റിപ്പോർട്ട് ചെയ്ത സെൻസർ ഫീഡ്ബാക്കും [ആവർത്തിക്കുക വരെ] ബ്ലോക്കുകളും ഉപയോഗിച്ച് ഈ പാഠം ഇതേ വെല്ലുവിളി പരിഹരിക്കും.
പഠന ഫലങ്ങൾ
- ഒരു പ്രോജക്റ്റിൽ [Repeat until] ബ്ലോക്ക് എങ്ങനെ ഉപയോഗിക്കാമെന്ന് തിരിച്ചറിയുക.
- ഒരു വസ്തുവിന് നിറം കണ്ടെത്താൻ കഴിയുന്നത്ര അടുത്താണ് ഐ സെൻസർ ഉള്ളതെന്ന് <Eye Sensor near object> ബ്ലോക്ക് റിപ്പോർട്ട് ചെയ്യുന്നുവെന്ന് തിരിച്ചറിയുക.
- ഗൈറോ സെൻസർ ഉപയോഗിച്ച് [Turn to heading] കമാൻഡ് ഒരു ഡ്രൈവ്ട്രെയിനിനെ ഒരു നിർദ്ദിഷ്ട ഹെഡിംഗിലേക്ക് മാറ്റുന്നുവെന്ന് തിരിച്ചറിയുക.
- ഗൈറോ സെൻസറിന്റെ നിലവിലെ ഹെഡിംഗ് അടിസ്ഥാനമാക്കി ഏത് ദിശയിലേക്ക് തിരിയണമെന്ന് [Turn to heading] കമാൻഡ് നിർണ്ണയിക്കുമെന്ന് തിരിച്ചറിയുക.
- ഒരു [Turn] അല്ലെങ്കിൽ ഒരു [Turn for] കമാൻഡിന് പകരം ഒരു [Turn to heading] കമാൻഡ് ഉപയോഗിക്കുന്നത് എന്തുകൊണ്ടാണെന്ന് വിശദീകരിക്കുക.
എന്തിനാണ് സെൻസറുകൾ ഉപയോഗിക്കുന്നത്?
പാഠം 2-ൽ, VR റോബോട്ട് [Drive for] ബ്ലോക്ക് ഉപയോഗിച്ച് ഒരു നിശ്ചിത ദൂരം ഓടിച്ചു, ഒരു നീല ഡിസ്ക് എടുത്ത് ലക്ഷ്യത്തിലേക്ക് തിരികെ നീക്കി. ഡിസ്ക് മൂവർ പ്ലേഗ്രൗണ്ട്ലെ ഗ്രിഡ് സ്ക്വയറുകളുടെ അളവുകൾ ഉപയോഗിച്ച് VR റോബോട്ടും ആദ്യത്തെ നീല ഡിസ്കും തമ്മിലുള്ള ദൂരം കണക്കാക്കുകയും പരിശോധിക്കുകയും ചെയ്തു. ഇത് വെല്ലുവിളി പരിഹരിച്ചെങ്കിലും, വ്യത്യസ്ത ദൂരങ്ങളിൽ ഒന്നിലധികം ഡിസ്കുകൾ എടുക്കുന്നതിനായി പ്രക്രിയ ഡ്യൂപ്ലിക്കേറ്റ് ചെയ്യുന്നതിൽ പിശകുകൾക്ക് ധാരാളം സാധ്യതയുണ്ട്, ഈ യൂണിറ്റിന്റെ അവസാനത്തിൽ ഡിസ്ക് മൂവർ ചലഞ്ച് പരിഹരിക്കുന്നതിന് ഇത് ആവശ്യമാണ്. റിപ്പോർട്ട് ചെയ്ത സെൻസർ ഫീഡ്ബാക്ക് ഉപയോഗിക്കുന്നത് ഈ വെല്ലുവിളി പരിഹരിക്കുന്നതിന് കൂടുതൽ കാര്യക്ഷമമായ മാർഗമാണ്, അതേസമയം കുറച്ച് ബ്ലോക്കുകൾ ഉപയോഗിച്ച് പ്രോജക്റ്റ് ഒപ്റ്റിമൈസ് ചെയ്യുകയും ചെയ്യുന്നു.
വിആർ റോബോട്ട് ഒരു ഡിസ്കുമായി കൂട്ടിയിടിച്ച് ദിശ തെറ്റിയാലോ? ലക്ഷ്യത്തിൽ നിന്ന് ഡിസ്കുകൾ അല്പം വ്യത്യസ്തമായ സ്ഥാനങ്ങളിലാണെങ്കിലോ? ഡിസ്ക് മൂവർ പ്ലേഗ്രൗണ്ട്ൽ ഡിസ്കുകളുടെ കൃത്യമായ സ്ഥാനം അറിയാതെ തന്നെ സെൻസറുകളിൽ നിന്നുള്ള ഫീഡ്ബാക്ക് ഉപയോഗിച്ച് അവയെ കൃത്യമായി എടുക്കാനും നീക്കാനും കഴിയും.
പ്രോജക്റ്റിൽ ഏതൊക്കെ സെൻസറുകളാണ് ഉപയോഗിക്കേണ്ടതെന്ന് നിർണ്ണയിക്കാൻ വെല്ലുവിളി പരിഹരിക്കുന്നതിനുള്ള ഘട്ടങ്ങൾ ഉപയോഗിക്കാം.
-
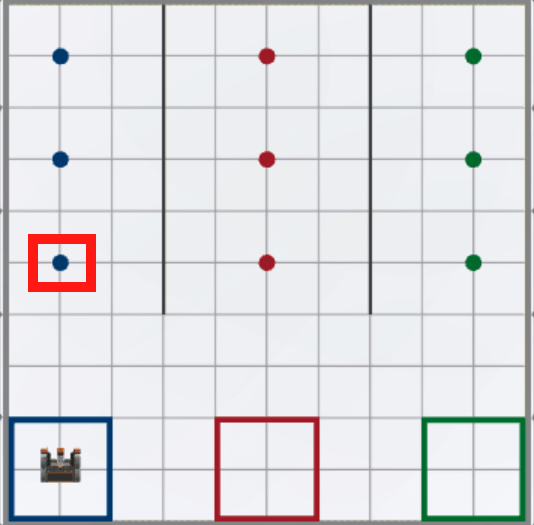
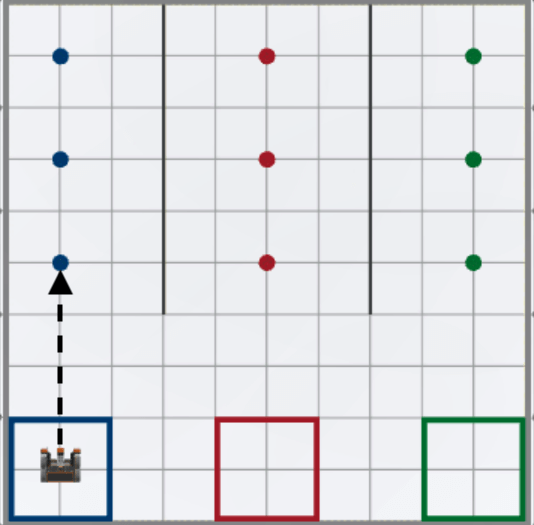
ആദ്യം: വിആർ റോബോട്ട് ആദ്യത്തെ നീല ഡിസ്കിലേക്ക് പോകും.
-
ഡിസ്കുകൾ കളിസ്ഥലത്തിന്റെ നിലത്താണ്. ഒരു ഡിസ്ക് എവിടെയാണെന്ന് നിർണ്ണയിക്കാൻ, <Eye Sensor near object> ബ്ലോക്കിനൊപ്പം ഡൗൺ ഐ സെൻസർ ഉപയോഗിക്കാം.

-
-
രണ്ടാമത്തേത്: വിആർ റോബോട്ട് ആദ്യത്തെ നീല ഡിസ്ക് എടുക്കും.

-
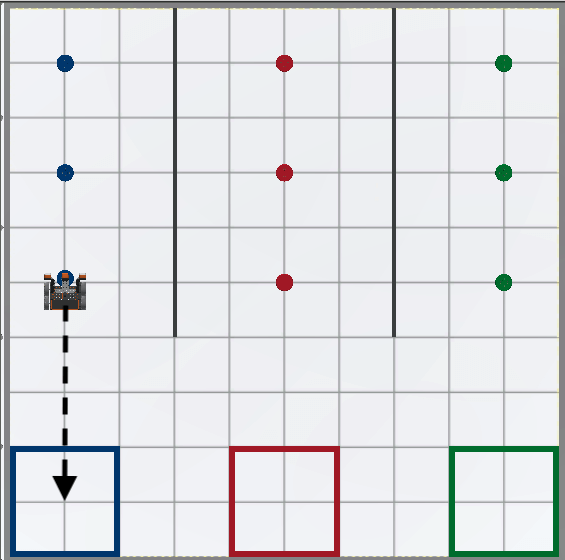
മൂന്നാമത്: വിആർ റോബോട്ട് നീല ലക്ഷ്യത്തിലേക്ക് തിരികെ പോകും.
-
നീല ലക്ഷ്യത്തിലേക്ക് തിരികെ വാഹനമോടിക്കുമ്പോൾ, എപ്പോൾ ഡ്രൈവിംഗ് നിർത്തണമെന്ന് നിർണ്ണയിക്കാൻ വിആർ റോബോട്ട് ഡിസ്റ്റൻസ് സെൻസർ ഉപയോഗിക്കും. കളിസ്ഥലത്തിന്റെ ചുമരിൽ നിന്ന് വിആർ റോബോട്ടിന്റെ മുൻഭാഗം എത്ര ദൂരെയാണെന്ന് നിർണ്ണയിക്കാൻ ഡിസ്റ്റൻസ് സെൻസർ ഉപയോഗിക്കാം.
-
-
ഒടുവിൽ: വി.ആർ. റോബോട്ട് നീല ഡിസ്ക് നീല ഗോളിലേക്ക് ഇടും.
ഈ പാഠത്തിന്റെ ബാക്കി ഭാഗം തുടരാൻ അടുത്തത് ബട്ടൺ തിരഞ്ഞെടുക്കുക.