
বিকল্প কোডিং পদ্ধতি
একটি বিকল্প কোডিং পদ্ধতি ব্যবহার করতে এই ইউনিটটি অ্যাডাপ্ট করুন
এই STEM ল্যাব ইউনিটটি কোডার এবং কোডার কার্ডের সাথে ব্যবহারের জন্য লেখা হয়েছে । যাইহোক, আপনি কোড স্পর্শ করতে 123 রোবটের বোতামগুলি ব্যবহার করতে পারেন, বা ইউনিটটি বাস্তবায়নের জন্য VEXcode 123 ব্যবহার করতে পারেন । এই নমনীয়তা আপনাকে আপনার শিক্ষার্থীদের ব্যক্তিগত চাহিদা মেটাতে সাহায্য করতে পারে । উদাহরণস্বরূপ, যদি আপনার শিক্ষার্থীরা ইতিমধ্যে VEXcode 123 এর সাথে পরিচিত হয়, তাহলে তারা VEXcode 123 দিয়ে সমস্ত কোডিং কার্যক্রম সম্পন্ন করতে পারে । প্রতিটি ল্যাবের সারাংশ বিভাগে অতিরিক্ত তথ্য রয়েছে যা আপনাকে VEXcode 123 বা 123 রোবটের বোতামগুলি ব্যবহার করতে পৃথক ল্যাবকে সংশোধন করতে সহায়তা করতে পারে ।
VEXcode 123 অভিযোজন
এই ইউনিটের সাথে VEXcode 123 ব্যবহার করে, শিক্ষার্থীরা কোডিং ক্রিয়াকলাপে 123 রোবট চালানোর জন্য নিম্নলিখিত ব্লকগুলি ব্যবহার করতে পারে । VEXcode 123 এর সাথে কীভাবে কাজ করবেন সে সম্পর্কে আরও তথ্যের জন্য, STEM লাইব্রেরির VEXcode 123 বিভাগটি দেখুন।
| VEXcode 123 ব্লক | আচরণ |
|---|---|
 |
[ড্রাইভ ফর] ব্লকটি 123 রোবটকে সামনের দিকে বা একটি নির্দিষ্ট দূরত্বের বিপরীত দিকে নিয়ে যায় । ডিম্বাকৃতিতে একটি মান প্রবেশ করে 123 রোবটটি কতদূর যাবে তা নির্ধারণ করুন । |
 |
[টার্ন ফর] ব্লক নির্দিষ্ট সংখ্যক ডিগ্রির জন্য 123 রোবটকে বাম বা ডান দিকে ঘুরিয়ে দেয় । |
-
ল্যাব 1, প্লে পার্ট 2 এ, শিক্ষার্থীরা একটি প্রকল্প তৈরি করবে যাতে 123 রোবট একটি জটিল ক্রিয়া সম্পাদন করতে পারে যেমন একটি বৃত্তে স্পিনিং । একটি বৃত্তে 123 রোবট স্পিন থাকার জন্য প্লে পার্ট 2 এর সম্ভাব্য সমাধানের জন্য নীচে দেখুন ।
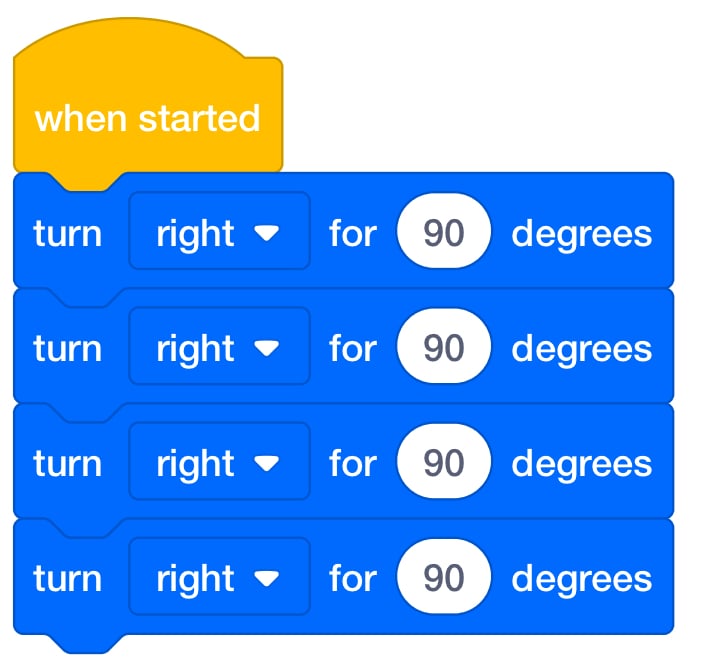
ল্যাব 1 - প্লে পার্ট 2 সলিউশন - একটি বৃত্তে স্পিন -
ল্যাব 2-এ, শিক্ষার্থীরা [Drive for] এবং [Turn for} VEXcode 123 ব্লকের উপরে আচরণ পর্যবেক্ষণ করতে পারে । শিক্ষার্থীরা 123 রোবটকে বিভিন্ন দূরত্বে নিয়ে যেতে, বিভিন্ন দিক ঘুরিয়ে দিতে বা নির্দিষ্ট সংখ্যক ডিগ্রির জন্য কীভাবে ব্লকের প্যারামিটারগুলি পরিবর্তন করতে পারে তা অন্বেষণ করুন । তারপর প্লে পার্ট 2 এর জন্য, তাদের একটি VEXcode প্রকল্প তৈরি করতে বলুন যাতে একটি বর্গক্ষেত্রের মধ্যে 123 রোবট ড্রাইভ রয়েছে । একটি স্কোয়ারে প্লে পার্ট 2-ড্রাইভের জন্য সম্ভাব্য VEXcode 123 সমাধানের জন্য নীচে দেখুন ।
 একটি স্কোয়ারে গাড়ি চালানোর
একটি স্কোয়ারে গাড়ি চালানোর সম্ভাব্য সমাধান -
ল্যাব 3-এ, শিক্ষার্থীরা একটি ম্যাপ চ্যালেঞ্জ প্রম্পট দ্বারা নির্দিষ্ট করা একটি গন্তব্য থেকে 123 রোবট ড্রাইভের জন্য একটি প্রকল্প তৈরি করবে । প্লে পার্ট 1 মানচিত্র লেআউটের উপর ভিত্তি করে পার্ক থেকে হাউসে গাড়ি চালানোর জন্য এটি একটি সম্ভাব্য VEXcode 123 সমাধান ।
 পার্ক থেকে হাউসে গাড়ি চালানোর
পার্ক থেকে হাউসে গাড়ি চালানোর সম্ভাব্য সমাধান -
ল্যাব ৪-এ, শিক্ষার্থীরা ডিবাগিং প্রকল্প অনুশীলন করে । ডিবাগ করার জন্য শিক্ষার্থীদের ইচ্ছাকৃত আচরণ এবং ভুল VEXcode 123 প্রকল্প দিন । অভিপ্রেত আচরণ: চারটি স্পেস ড্রাইভ করুন, বাম এবং গ্লো বেগুনি ঘুরান, একটি স্পেস চালান, ডানদিকে ঘুরান, তারপরে হন্ক করুন। শিক্ষার্থীদের ডিবাগ করার জন্য বাম দিকে প্রকল্পটি দিন । ডানদিকে VEXcode 123 প্রকল্প হল সমাধান ।

কোডিং মৌলিক ল্যাব 4 সমাধান
টাচ অ্যাডাপ্টেশন
আপনি এই ল্যাবগুলিতে ক্রিয়াকলাপগুলি সম্পূর্ণ করতে 123 রোবটের বোতামগুলি ব্যবহার করতে এই ইউনিটটি অ্যাডাপ্ট করতে পারেন । শিক্ষার্থীদের বুঝতে হবে যে একটি বোতামের প্রতিটি চাপ 123 রোবটের 1 নড়াচড়ার সমান । তারপরে, তারা একাধিক বোতাম টিপে একটি প্রকল্প তৈরি করতে পারে । শিক্ষার্থীদের চিহ্নিত করা উচিত যে যে আদেশে তারা বোতাম টিপবে তা হল 123 রোবট আচরণ সম্পাদন করবে । 123 রোবট কীভাবে ব্যবহার করবেন সে সম্পর্কে আরও তথ্যের জন্য, 123 রোবট স্টেম লাইব্রেরি নিবন্ধটি দেখুন। 123 রোবটের টাচ বোতামগুলি ব্যবহার করে কোডিং সম্পর্কে আরও তথ্যের জন্য, 123 রোবট স্টেম লাইব্রেরি নিবন্ধে টাচ বোতামগুলির সাথে কোডিং দেখুন।
| বোতাম | নাম | আচরণ |
|---|---|---|
 |
শুরু করুন | যখন চাপ দেওয়া হয় তখন প্রকল্পটি শুরু হয় । |
 |
সরান | 123 রোবট 1 রোবটের দৈর্ঘ্য, বা 123 ক্ষেত্রের 1 বর্গক্ষেত্রের জন্য এগিয়ে যাবে । |
 |
ডান | 123 রোবট 90 ডিগ্রি ডানে ঘুরবে । |
 |
বাম | 123 রোবট 90 ডিগ্রি বাম দিকে ঘুরবে । |
 |
শব্দ | 123 Robot একটি হনক সাউন্ড বাজাবে । |
- ল্যাব 1 এর সাথে খাপ খাইয়ে নিতে, শিক্ষার্থীদের একটি প্রকল্প তৈরি করতে হবে যাতে 123 রোবট একটি জটিল আচরণ সম্পাদন করতে পারে যেমন একটি বৃত্তে ঘুর্ণন । শিক্ষার্থীদের প্রয়োজনীয় পদক্ষেপগুলি ভেঙে ফেলতে বলুন, তারপরে 123 রোবটের বোতামগুলির সাথে একটি টাচ কোড প্রকল্প তৈরি করুন । এটি একটি বৃত্তের মধ্যে রোবট স্পিন করার সম্ভাব্য সমাধানের একটি উদাহরণ । সমাধানটি বাম থেকে ডানে বোতাম টিপুন ক্রমটি দেখায় ।
| 1 | 2 | 3 | 4 |
|---|---|---|---|
|
|
|
|
- ল্যাব 2 মানিয়ে নিতে, এনগেজ বিভাগে বোতাম আইকনে ফোকাস করুন এবং বোতামের প্রতীকগুলি কীভাবে 123 রোবট আচরণের প্রতিনিধিত্ব করে । তারপরে, শিক্ষার্থীদের একটি স্কোয়ারে রোবট ড্রাইভ করার জন্য একটি প্রকল্প তৈরি করতে 123 রোবটের বোতামগুলি ব্যবহার করতে বলুন । একটি বর্গক্ষেত্রের মধ্যে রোবট ড্রাইভ করার বিভিন্ন উপায় রয়েছে । এটি একটি সম্ভাব্য সমাধান যা বাম থেকে ডানে ক্রমানুসারে বোতাম টিপে দেখায় ।
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
|---|---|---|---|---|---|---|---|
|
|
|
|
|
|
|
|
- ল্যাব 3 এর সাথে মানিয়ে নিতে, শিক্ষার্থীদের একটি প্রকল্প তৈরি করতে 123 রোবটের বোতামগুলি ব্যবহার করতে বলুন যেখানে রোবটটি একটি ম্যাপ চ্যালেঞ্জ প্রম্পট দ্বারা নির্দিষ্ট হিসাবে শুরু থেকে গন্তব্যে ড্রাইভ করে । এই উদাহরণ সমাধানটি 123 রোবটকে পার্ক থেকে প্লে পার্ট 1-এ মানচিত্র সেটআপের ঘরে নিয়ে যাবে । সমাধানটি বাম থেকে ডানে বোতাম টিপুন ক্রমটি দেখায় ।
| 1 | 2 | 3 | 4 | 5 |
|---|---|---|---|---|
|
|
|
|
|
- ডিবাগিং হল ল্যাব ৪ এর ফোকাস । ডিবাগ করার জন্য শিক্ষার্থীদের উদ্দেশ্যে আচরণ এবং একটি ভুল স্পর্শ প্রকল্প দিন । অভিপ্রেত আচরণ হিসাবে নিম্নলিখিতগুলি ব্যবহার করুন: চারটি স্পেস ড্রাইভ করুন, বাম দিকে ঘুরুন, একটি স্পেস চালান, ডানদিকে ঘুরুন, তারপরে হনক করুন। ডিবাগ করার জন্য শিক্ষার্থীদের উপরে প্রকল্পটি দিন । নীচে স্পর্শ প্রকল্প হল সমাধান । নীচের টাচ কোড প্রকল্পগুলি বাম থেকে ডানে বোতাম টিপুন ক্রমটি দেখায় ।
- প্রথম টেবিলটি 123 রোবটকে উপরে তালিকাভুক্ত "ইচ্ছাকৃত আচরণ" সম্পূর্ণ করার জন্য ডিবাগ করা একটি প্রকল্প দেখায় । বোতাম প্রেসগুলি বাম থেকে ডানে ক্রমিক হয় ।
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
|---|---|---|---|---|---|---|---|
|
|
|
|
|
|
|
|
- এই টেবিলটি উপরে তালিকাভুক্ত অভিপ্রেত আচরণের জন্য স্পর্শ প্রকল্পের সমাধান দেখায় । বোতাম প্রেসগুলি বাম থেকে ডানে ক্রমিক হয় ।
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
|---|---|---|---|---|---|---|---|
|
|
|
|
|
|
|
|