
대체 코딩 방법
대체 코딩 방법을 사용하도록 이 단원을 조정하십시오
이 STEM Lab Unit은 Coder 및 Coder 카드와 함께 사용하도록 작성되었습니다. 그러나 123 로봇의 버튼을 사용하여 코드를 만지거나 VEXcode 123을 사용하여 장치를 구현할 수 있습니다. 이러한 유연성은 학생들의 개별적인 요구를 충족시키는 데 도움이 될 수 있다. 예를 들어, 학생들이 이미 VEXcode 123에 익숙하다면 VEXcode 123으로 모든 코딩 활동을 완료할 수 있습니다. 각 랩의 요약 섹션에는 VEXcode 123 또는 123 로봇의 버튼을 사용하도록 개별 랩을 수정하는 데 도움이 되는 추가 정보가 포함되어 있습니다.
VEXcode 123 적응
이 유닛과 함께 VEXcode 123을 사용하는 경우, 학생들은 다음 블록을 사용하여 코딩 활동에서 123 로봇을 구동할 수 있습니다. VEXcode 123으로 작업하는 방법에 대한 자세한 내용은 STEM 라이브러리의 VEXcode 123 섹션을 참조하십시오.
| VEXcode 123 블록 | 행동 |
|---|---|
 |
[Drive for] 블록은 123 로봇을 주어진 거리를 앞으로 또는 반대로 이동시킵니다. 123 로봇이 타원형에 값을 입력하여 얼마나 멀리 이동할지 설정합니다. |
 |
[Turn for] 블록은 지정된 각도만큼 123 로봇을 왼쪽이나 오른쪽으로 돌립니다. |
-
실험실 1, 플레이 파트 2에서 학생들은 123 로봇이 원을 그리며 회전하는 것과 같은 복잡한 동작을 실행하도록 프로젝트를 만듭니다. Play Part 2에서 123 로봇을 원으로 회전시킬 수 있는 가능한 해결책은 아래를 참조하십시오.
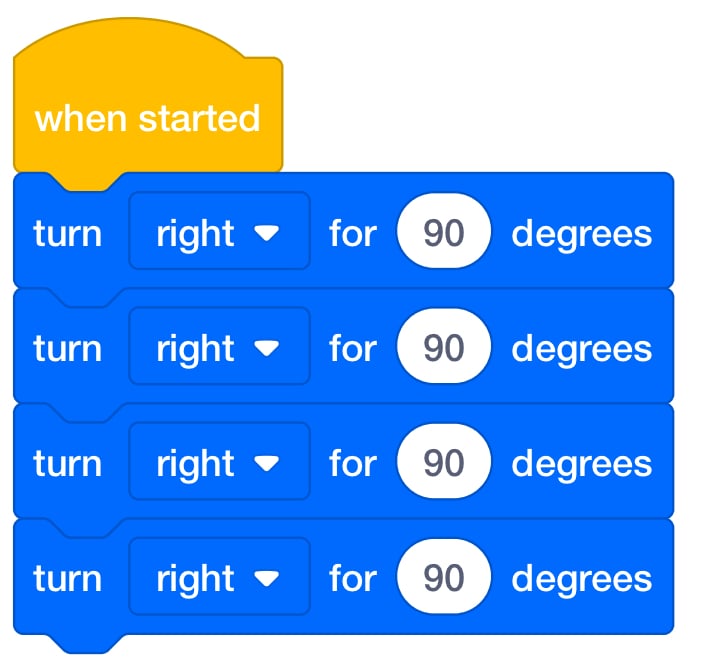
실습 1 - Play Part 2 솔루션 - 원형으로 회전 -
실험실 2에서 학생들은 위의 [Drive for] 및 [Turn for} VEXcode 123 블록에 대한 동작을 관찰할 수 있습니다. 학생들에게 블록의 매개 변수를 변경하여 123 로봇이 다양한 거리를 이동하거나 다른 방향을 돌리거나 지정된 각도를 돌리는 방법을 탐구하게 합니다. 그런 다음 Play Part 2의 경우 사각형에 123 로봇 드라이브가 있는 VEXcode 프로젝트를 생성하도록 합니다. Play Part 2 -drive in a square에 대한 가능한 VEXcode 123 솔루션은 아래를 참조하십시오.

정사각형으로 운전할 수 있는 솔루션 -
실험실 3에서 학생들은 시작 지점에서 지도 챌린지 프롬프트에 지정된 목적지까지 123 로봇 드라이브를 갖는 프로젝트를 만듭니다. 이것은 Play Part 1 지도 레이아웃을 기반으로 파크에서 하우스로 운전하는 프롬프트를 위한 가능한 벡스코드 123 솔루션입니다.
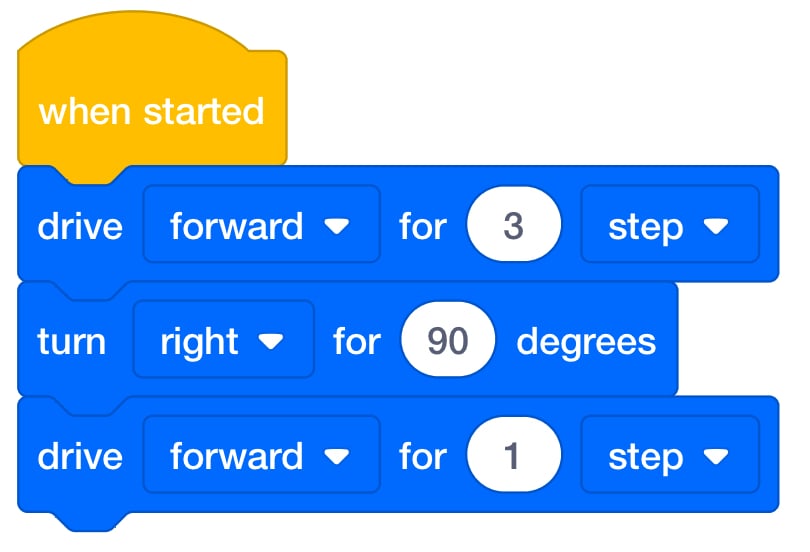 공원에서 숙소까지 차로 이동할 수 있는
공원에서 숙소까지 차로 이동할 수 있는 가능한 해결책 -
실습 4에서는 학생들이 디버깅 프로젝트를 연습합니다. 학생들에게 디버깅할 의도된 동작과 잘못된 VEXcode 123 프로젝트를 제공합니다. 의도된 행동: 4칸을 운전하고, 좌회전하여 보라색으로 빛나고, 1칸을 운전하고, 우회전한 다음 경적을울립니다. 학생들에게 디버깅할 왼쪽의 프로젝트를 제공합니다. 오른쪽에 있는 VEXcode 123 프로젝트가 해결책입니다.
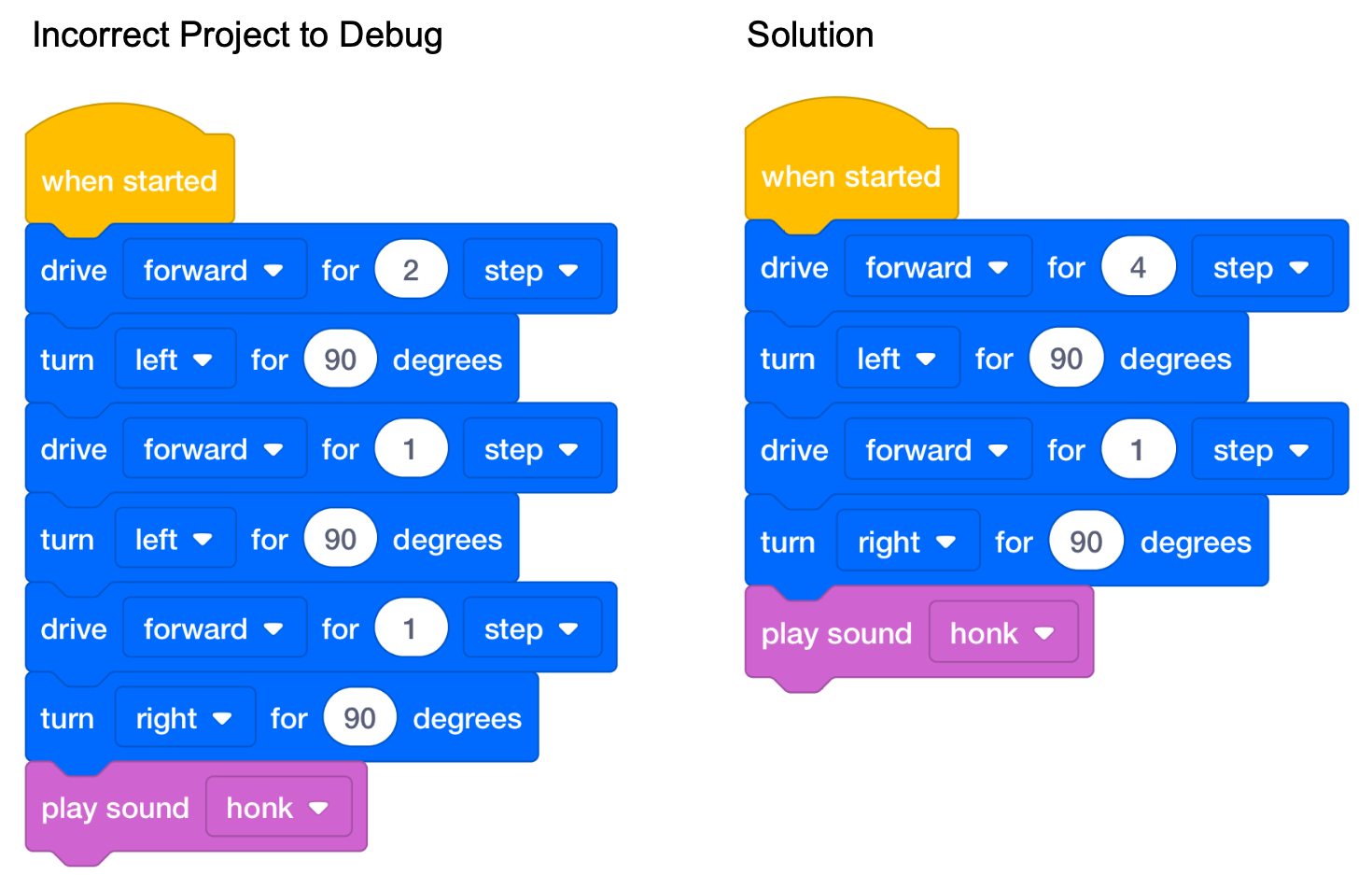
코딩 기초 실습 4 솔루션
터치 적응
123 로봇의 버튼을 사용하여 이 실험실에서 활동을 완료하도록 이 유닛을 조정할 수도 있습니다. 학생들은 버튼을 누를 때마다 123 로봇의 움직임이 1이 된다는 것을 이해해야 합니다. 그런 다음 일련의 버튼 프레스로 프로젝트를 만들 수 있습니다. 학생들은 버튼을 누르는 순서가 123 로봇이 동작을 실행하는 순서임을 식별해야 합니다. 123 로봇 사용 방법에 대한 자세한 내용은 123 로봇 STEM 라이브러리 사용 문서를 참조하십시오. 123 로봇의 터치 버튼을 사용하여 코딩하는 방법에 대한 자세한 내용은 123 로봇 STEM 라이브러리 문서의 터치 버튼으로 코딩 을 참조하십시오.
| 버튼 | 이름 | 행동 |
|---|---|---|
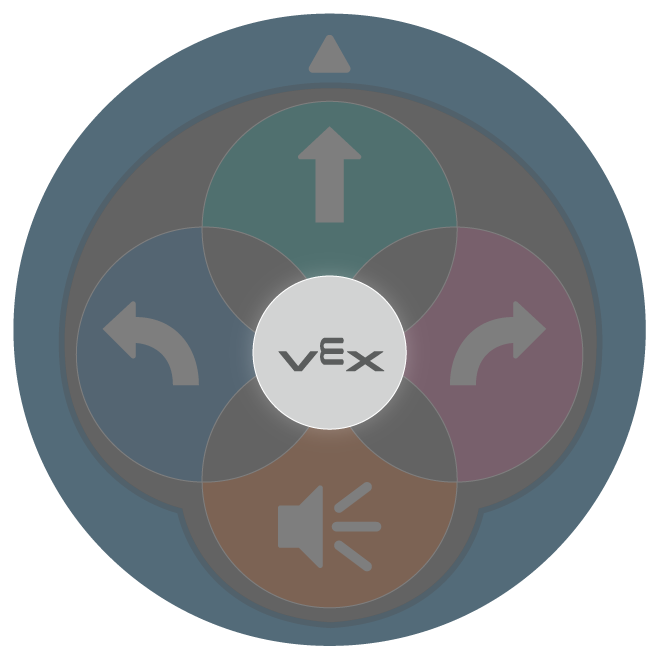 |
시작 | 키를 누르면 프로젝트를 시작합니다. |
 |
이동 | 123 로봇은 로봇 길이 1 개 또는 123 필드의 사각형 1 개를 앞으로 구동합니다. |
 |
오른쪽 | 123 로봇이 오른쪽으로 90도 회전합니다. |
 |
왼쪽 | 123 로봇이 왼쪽으로 90도 회전합니다. |
 |
소리 | 123 로봇이 경적 소리를 재생합니다. |
- 실험실 1에 적응하기 위해 학생들에게 123 로봇이 원을 그리며 회전하는 것과 같은 복잡한 동작을 실행하도록 하는 프로젝트를 만들도록 합니다. 학생들에게 필요한 단계를 세분화한 다음 123 로봇의 버튼으로 터치 코드 프로젝트를 생성하도록 합니다. 이것은 로봇이 원을 그리며 회전할 수 있는 해결책의 예입니다. 이 솔루션은 왼쪽에서 오른쪽으로 버튼을 누르는 순서를 보여줍니다.
| 1 | 2 | 3 | 4 |
|---|---|---|---|
|
|
|
|
- 실험실 2를 조정하려면 참여 섹션의 버튼 아이콘과 버튼의 기호가 123 로봇 동작을 나타내는 방법에 초점을 맞춥니다. 그런 다음 학생들에게 123 로봇의 버튼을 사용하여 로봇이 사각형으로 구동되도록 프로젝트를 만들게 합니다. 로봇이 사각형으로 구동하는 방법은 다양합니다. 이것은 왼쪽에서 오른쪽으로 버튼을 차례로 누르는 것을 보여주는 가능한 해결책입니다.
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
|---|---|---|---|---|---|---|---|
|
|
|
|
|
|
|
|
- 실험실 3에 적응하기 위해 학생들에게 123 로봇의 버튼을 사용하여 로봇이 지도 챌린지 프롬프트에 지정된 대로 처음부터 목적지까지 운전하는 프로젝트를 생성하도록 합니다. 이 예제 솔루션은 Play Part 1의 지도 설정에서 123 로봇을 공원에서 집으로 구동합니다. 이 솔루션은 왼쪽에서 오른쪽으로 버튼을 누르는 순서를 보여줍니다.
| 1 | 2 | 3 | 4 | 5 |
|---|---|---|---|---|
|
|
|
|
|
- 디버깅은 실습 4의 초점입니다. 학생들에게 디버깅할 의도된 동작과 잘못된 터치 프로젝트를 제공합니다. 의도한 동작으로 다음을 사용하십시오. 4칸 운전하기, 좌회전하기, 1칸 운전하기, 우회전하기, 그리고 경적을 울리기. 학생들에게 디버깅할 상단의 프로젝트를 제공합니다. 하단의 터치 프로젝트가 해결책입니다. 아래의 터치 코드 프로젝트는 왼쪽에서 오른쪽으로 버튼을 누르는 순서를 보여줍니다.
- 첫 번째 표는 123 로봇이 위에 나열된 "의도된 동작" 을 완료하기 위해 디버깅할 프로젝트를 보여줍니다. 버튼 프레스는 왼쪽에서 오른쪽으로 순서가 지정됩니다.
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
|---|---|---|---|---|---|---|---|
|
|
|
|
|
|
|
|
- 이 표는 위에 나열된 의도된 행동에 대한 터치 프로젝트 솔루션을 보여줍니다. 버튼 프레스는 왼쪽에서 오른쪽으로 순서가 지정됩니다.
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
|---|---|---|---|---|---|---|---|
|
|
|
|
|
|
|
|