
वैकल्पिक कोडिंग विधियाँ
इस इकाई को वैकल्पिक कोडिंग विधि का उपयोग करने के लिए अनुकूलित करें
यह STEM लैब यूनिट कोडर और कोडर कार्ड के साथ उपयोग के लिए लिखी गई है। हालाँकि, आप कोड करने के लिए रोबोट पर बटन का उपयोग कर सकते हैं, या लागू करने के लिए VEXcode 123 का उपयोग कर सकते हैं। यह लचीलापन आपको अपने छात्रों की व्यक्तिगत आवश्यकताओं को पूरा करने में मदद कर सकता है। उदाहरण के लिए, यदि आपके छात्र पहले से ही VEXcode 123 से परिचित हैं, तो वे VEXcode 123 के साथ सभी गतिविधियों को पूरा कर हैं। प्रत्येक के सारांश अनुभाग में अतिरिक्त जानकारी होती है आपको VEXcode या रोबोट पर बटन का उपयोग करने के लिए व्यक्तिगत को संशोधित करने मदद कर सकती है।
VEXcode 123 अनुकूलन
यदि इस इकाई के साथ VEXcode 123 का उपयोग किया जाता है, तो छात्र कोडिंग गतिविधियों में 123 रोबोट को चलाने के लिए निम्नलिखित ब्लॉकों का उपयोग कर सकते हैं। VEXcode 123 के साथ काम करने के तरीके के बारे में अधिक जानकारी के लिए, STEM लाइब्रेरीके VEXcode 123 अनुभाग को देखें।
| VEXcode 123 ब्लॉक | व्यवहार |
|---|---|
 |
[ड्राइव फॉर] ब्लॉक 123 रोबोट को एक निश्चित दूरी तक आगे या पीछे ले जाता है। अंडाकार में मान दर्ज करके 123 रोबोट कितनी दूर जाएगा, निर्धारित करें। |
 |
[टर्न फॉर] ब्लॉक 123 रोबोट को एक निर्दिष्ट संख्या में डिग्री के लिए बाईं या दाईं ओर घुमाता है। |
-
लैब 1, प्ले भाग 2 में, छात्र 123 रोबोट को एक जटिल क्रिया जैसे कि एक सर्कल में घूमना, निष्पादित करने के लिए एक प्रोजेक्ट बनाएंगे। के लिए संभावित समाधान के लिए नीचे देखें भाग 2 खेलें 123 रोबोट को एक सर्कल में घुमाएं।
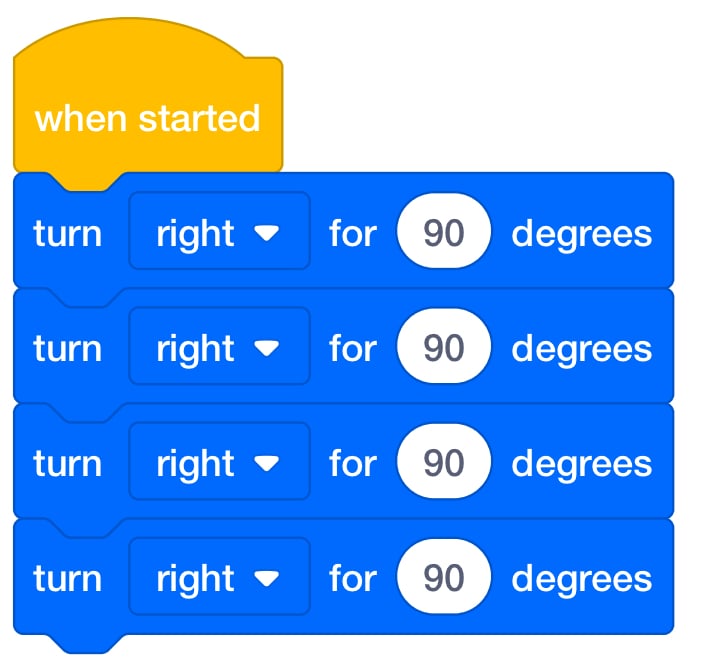
लैब 1 - खेल भाग 2 समाधान - एक वृत्त में घूमें -
लैब 2 में, छात्र ऊपर दिए गए [ड्राइव फॉर] और [टर्न फॉर} VEXcode 123 ब्लॉक के लिए व्यवहार अवलोकन कर सकते हैं। छात्रों को यह पता लगाने दें कि वे ब्लॉकों में पैरामीटर कैसे बदल सकते हैं ताकि 123 रोबोट विभिन्न दूरियों तक जा सके, विभिन्न दिशाओं में घूम सके, या निर्दिष्ट संख्या में डिग्री तक घूम सके। फिर प्ले पार्ट 2 के लिए, उन्हें एक VEXcode प्रोजेक्ट बनाएं जिसमें 123 रोबोट एक वर्ग में ड्राइव हो। प्ले पार्ट 2 के लिए संभावित VEXcode 123 समाधान के नीचे देखें - एक वर्ग में ड्राइव करें।
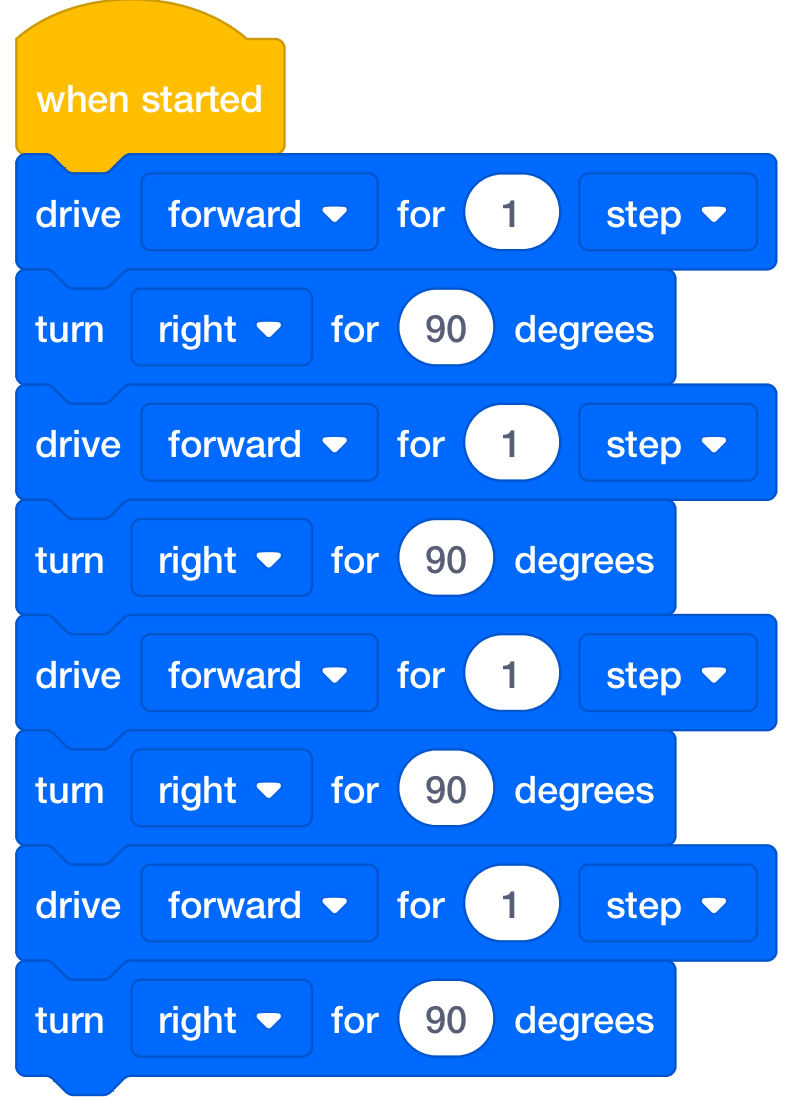
वर्गाकार पथ पर चलने का संभावित समाधान -
लैब 3 में, छात्र 123 रोबोट को मानचित्र चुनौती प्रॉम्प्ट द्वारा निर्दिष्ट प्रारंभिक बिंदु से गंतव्य तक ड्राइव करने के लिए एक प्रोजेक्ट बनाएंगे। यह प्ले पार्ट 1 मानचित्र लेआउट के आधार पर पार्क से हाउस तक ड्राइव करने के प्रॉम्प्ट के लिए एक संभावित VEXcode 123 समाधान है।
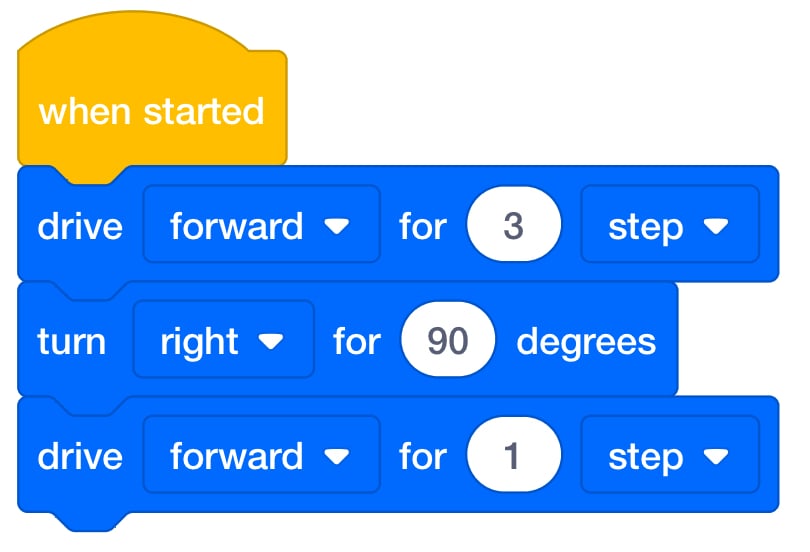
पार्क से घर तक ड्राइव करने का संभावित समाधान -
लैब 4 में, छात्र डिबगिंग परियोजनाओं का अभ्यास करते हैं। छात्रों को डिबग करने के लिए इच्छित व्यवहार और गलत VEXcode 123 प्रोजेक्ट दें। इच्छित व्यवहार: चार स्थान तक ड्राइव करें, बाएं मुड़ें और बैंगनी चमकें, एक स्थान तक ड्राइव करें, दाएं मुड़ें, फिर हॉर्न बजाएं। छात्रों को बाईं ओर का प्रोजेक्ट डीबग करने के लिए दें। दाईं ओर दिया गया VEXcode 123 प्रोजेक्ट इसका समाधान है।
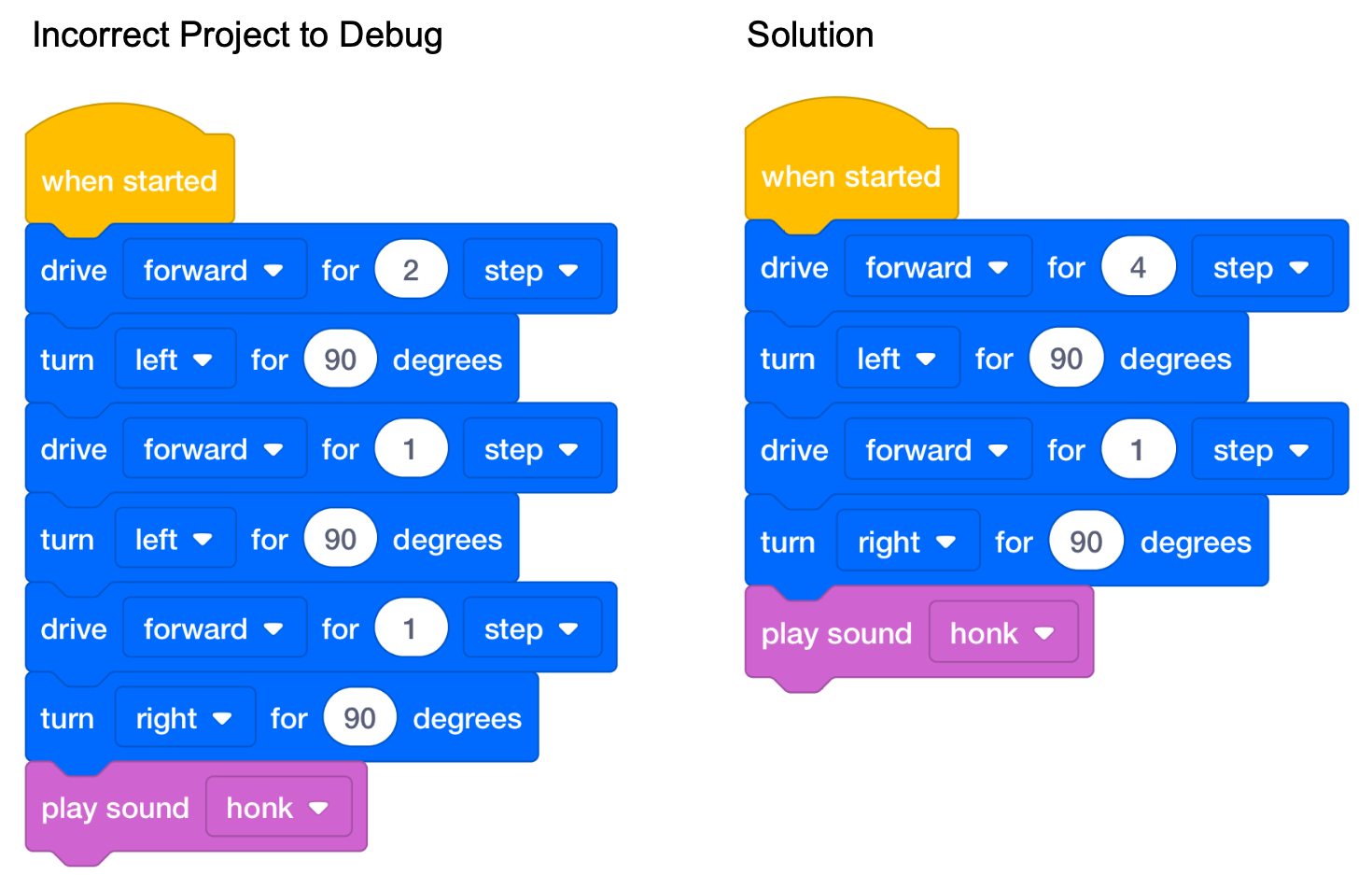
कोडिंग फंडामेंटल्स लैब 4 समाधान
स्पर्श अनुकूलन
आप इस इकाई को इन प्रयोगशालाओं में गतिविधियों को पूरा करने के लिए 123 रोबोट पर बटनों का उपयोग करने के लिए भी अनुकूलित कर सकते हैं। छात्रों को यह समझना चाहिए कि बटन का प्रत्येक दबाव 123 रोबोट की 1 गति के बराबर है। , वे बटन दबाने की एक श्रृंखला के साथ एक परियोजना बना सकते हैं। छात्रों को पहचानना कि जिस क्रम में वे बटन दबाते हैं, उसी क्रम में व्यवहार निष्पादित करेगा। 123 रोबोट का उपयोग कैसे करें, इसके बारे में अधिक जानकारी के लिए, 123 रोबोट STEM लाइब्रेरी का उपयोग करना लेखदेखें। 123 रोबोट पर टच बटन का उपयोग करके कोडिंग के बारे में अधिक जानकारी के लिए, रोबोट पर टच बटन के साथ कोडिंग STEM लाइब्रेरी लेखदेखें।
| बटन | नाम | व्यवहार |
|---|---|---|
 |
शुरू | दबाने पर प्रोजेक्ट शुरू हो जाता है. |
 |
कदम | 123 रोबोट 1 रोबोट लंबाई, या 123 फ़ील्ड पर 1 वर्ग के लिए आगे ड्राइव करेगा। |
 |
सही | 123 रोबोट 90 डिग्री दाईं ओर घूम जाएगा। |
 |
बाएं | 123 रोबोट 90 डिग्री बायीं ओर घूम जाएगा। |
 |
आवाज़ | 123 रोबोट हॉर्न ध्वनि बजाएगा। |
- लैब 1 को अनुकूलित करने के लिए, छात्रों से एक प्रोजेक्ट तैयार करवाएं जिसमें 123 रोबोट एक जटिल व्यवहार जैसे कि वृत्त में घूमना आदि को निष्पादित कर सके। छात्रों को आवश्यक चरणों को समझाने को कहें, फिर 123 रोबोट पर बटनों के साथ एक स्पर्श कोड परियोजना बनाएं। रोबोट को एक वृत्त में घुमाने के संभावित समाधान का एक उदाहरण है। समाधान बाएं से दाएं बटन दबाने का क्रम दिखाता है
| 1 | 2 | 3 | 4 |
|---|---|---|---|
|
|
|
|
- लैब 2 को अनुकूलित करने के लिए, संलग्न अनुभाग में बटन आइकन पर ध्यान केंद्रित करें, और बटन पर प्रतीक रोबोट व्यवहार का प्रतिनिधित्व कैसे करते हैं। इसके बाद, छात्रों को रोबोट पर लगे बटनों का उपयोग करके रोबोट को एक वर्ग में चलाने का प्रोजेक्ट बनाने को कहूंगा। रोबोट को एक वर्ग में चलाने के विभिन्न तरीके हैं। यह एक संभावित समाधान है जो बटन दबाने को बाएं से दाएं क्रम में दिखाता है।
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
|---|---|---|---|---|---|---|---|
|
|
|
|
|
|
|
|
- लैब 3 को अनुकूलित करने के लिए, छात्रों को 123 रोबोट पर बटनों का उपयोग करके एक प्रोजेक्ट बनाने को कहें, जिसमें रोबोट मानचित्र चुनौती प्रॉम्प्ट द्वारा निर्दिष्ट गंतव्य तक शुरू से अंत तक ड्राइव करता है। यह उदाहरण समाधान प्ले भाग 1 में मानचित्र सेटअप पर 123 रोबोट को पार्क से घर तक ड्राइव करेगा। समाधान बाएं से दाएं बटन प्रेस अनुक्रम दिखाता है।
| 1 | 2 | 3 | 4 | 5 |
|---|---|---|---|---|
|
|
|
|
|
- डिबगिंग लैब 4 का फोकस है। छात्रों को इच्छित व्यवहार और गलत स्पर्श को डीबग करने के लिए एक प्रोजेक्ट दें। निम्नलिखित को इच्छित व्यवहार के रूप में उपयोग करें: चार स्थान तक ड्राइव करें, बाएं मुड़ें, एक स्थान तक ड्राइव करें, दाएं मुड़ें, फिर हॉर्न बजाएं। छात्रों को डिबग करने के लिए शीर्ष पर मौजूद प्रोजेक्ट दें। नीचे की ओर टच परियोजना ही समाधान है। नीचे दिए गए टच कोड प्रोजेक्ट बटन दबाने क्रम बाएं से दाएं दिखाते हैं।
- पहली तालिका एक प्रोजेक्ट को दिखाती है जिसे 123 रोबोट द्वारा ऊपर सूचीबद्ध "इच्छित व्यवहारों" को पूरा करने के लिए डीबग किया जाना है। बटन दबाने का क्रम बाएं से दाएं है।
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
|---|---|---|---|---|---|---|---|
|
|
|
|
|
|
|
|
- यह तालिका ऊपर सूचीबद्ध इच्छित व्यवहारों के लिए स्पर्श परियोजना समाधान दिखाती है। बटन दबाने का क्रम बाएं से दाएं होता है
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
|---|---|---|---|---|---|---|---|
|
|
|
|
|
|
|
|