
วิธีการเข้ารหัสทางเลือก
ปรับหน่วยนี้เพื่อใช้วิธีการเข้ารหัสทางเลือก
หน่วยห้องปฏิบัติการ STEM นี้เขียนขึ้นเพื่อใช้กับ Coder และ Coder Cards อย่างไรก็ตามคุณสามารถใช้ปุ่มบนหุ่นยนต์ 123 เพื่อสัมผัสรหัสหรือใช้ VEXcode 123 เพื่อใช้งาน ยูนิต ความยืดหยุ่นนี้จะช่วยให้ท่านตอบสนองความต้องการส่วนบุคคลของนักเรียนได้ ตัวอย่างเช่นหากนักเรียนของท่านคุ้นเคยกับ VEXcode 123 อยู่แล้วพวกเขาสามารถ ทำกิจกรรม การเข้ารหัสทั้งหมดด้วย VEXcode 123 ได้ ส่วนสรุปของแต่ละ ห้องปฏิบัติการมีข้อมูลเพิ่มเติม ที่สามารถช่วยคุณ ปรับเปลี่ยนแต่ละ ห้องปฏิบัติการเพื่อใช้ VEXcode 123 หรือปุ่มบนหุ่นยนต์ 123
การปรับเปลี่ยน VEXcode 123
หากใช้ VEXcode 123 กับหน่วยนี้นักเรียนสามารถใช้บล็อกต่อไปนี้เพื่อขับเคลื่อนหุ่นยนต์ 123 ในกิจกรรม การเข้ารหัส สำหรับข้อมูลเพิ่มเติมเกี่ยวกับวิธีการทำงานกับ VEXcode 123 โปรดดูที่ส่วน VEXcode 123 ของคลังSTEM
| บล็อก VEXcode 123 | พฤติกรรม |
|---|---|
 |
บล็อก [Drive for] เคลื่อนหุ่นยนต์ 123 ตัวไปข้างหน้าหรือย้อนกลับตามระยะทางที่กำหนด กำหนด ระยะทางที่หุ่นยนต์ 123 จะเคลื่อนที่โดยการป้อนค่าลงในวงรี |
 |
บล็อก [Turn for] จะหมุนหุ่นยนต์ 123 ตัวไปทางซ้ายหรือขวาตามจำนวนองศาที่กำหนด |
-
ในห้องปฏิบัติการที่ 1 เล่นส่วนที่ 2 นักเรียนจะสร้างโครงการเพื่อให้หุ่นยนต์ 123 ดำเนินการที่ซับซ้อนเช่นการหมุนเป็นวงกลม ดูด้านล่างสำหรับ โซลูชันที่เป็นไปได้สำหรับการ เล่นส่วนที่ 2 เพื่อให้หุ่นยนต์ 123 ตัวหมุนเป็นวงกลม
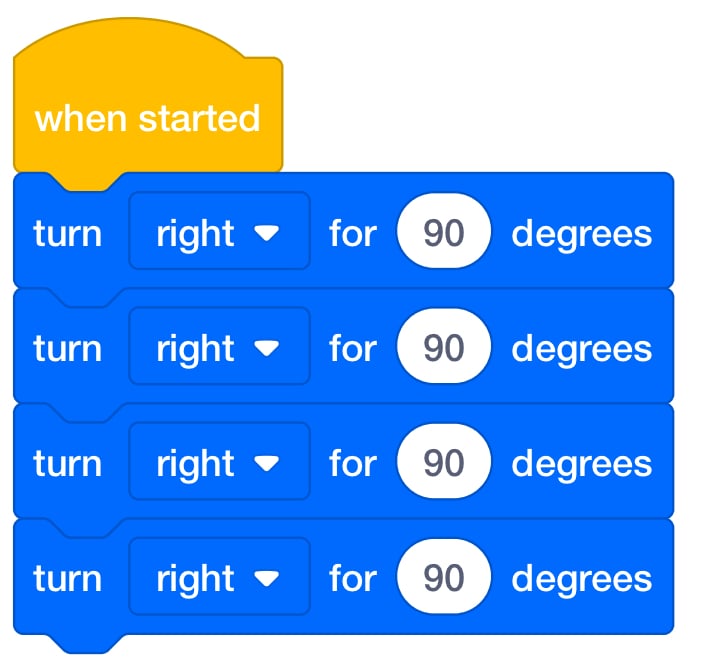
ห้องปฏิบัติการที่ 1 - เล่นโซลูชันส่วนที่ 2 - หมุนเป็นวงกลม -
ในห้องปฏิบัติการ 2 นักเรียนสามารถสังเกตพฤติกรรม ของ [Drive for] และ [Turn for} บล็อก VEXcode 123 ข้างต้น ให้นักเรียนสำรวจว่าพวกเขาจะเปลี่ยนพารามิเตอร์ในบล็อกเพื่อให้หุ่นยนต์ 123 เคลื่อนที่ได้หลายระยะหันทิศทางที่แตกต่างกันหรือหัน ตามจำนวนองศาที่กำหนดได้อย่างไร จากนั้นสำหรับการเล่นส่วนที่ 2 ให้พวกเขา สร้างโปรเจกต์ VEXcode ที่มีไดรฟ์ 123 Robot ในสี่เหลี่ยมจัตุรัส ดูด้านล่างสำหรับ โซลูชัน VEXcode 123 ที่เป็นไปได้สำหรับเล่นส่วนที่ 2 - ขับในสี่เหลี่ยมจัตุรัส
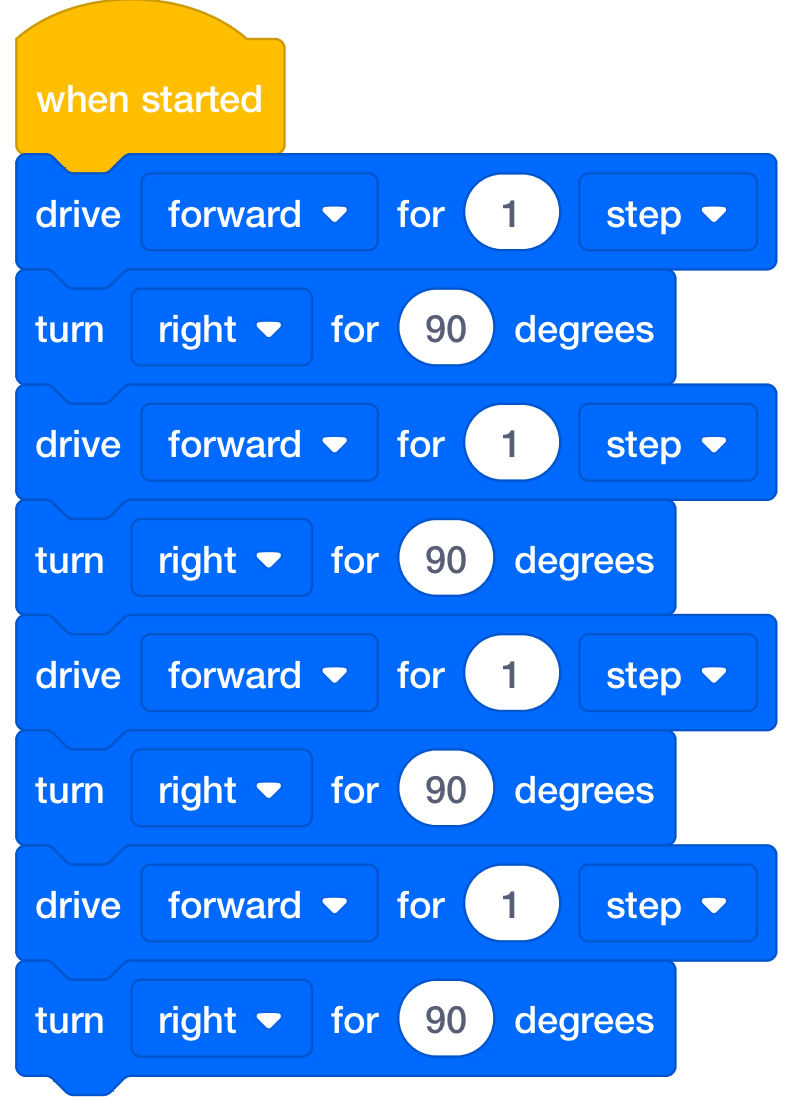
ปัญหาที่เป็นไปได้ในการขับรถในสี่เหลี่ยมจัตุรัส -
ในห้องปฏิบัติการที่ 3 นักเรียนจะสร้างโครงการเพื่อให้หุ่นยนต์ 123 ตัวขับเคลื่อนจากจุดเริ่มต้นไปยังปลายทางที่ระบุโดย Map Challenge Prompt นี่เป็นโซลูชัน VEXcode 123 ที่เป็นไปได้สำหรับการขับรถจากสวนสาธารณะไปยังบ้านตามเค้าโครงแผนที่ Play Part 1
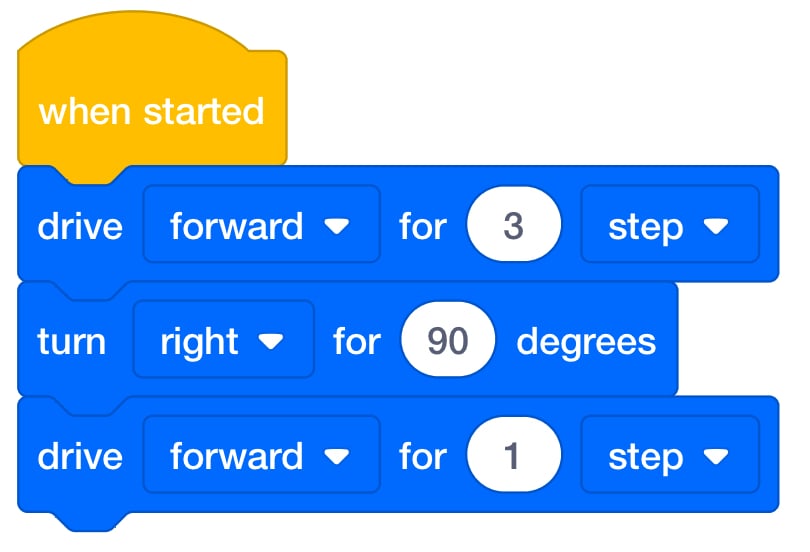
ปัญหาที่เป็นไปได้ในการขับรถจากสวนไปยังบ้าน -
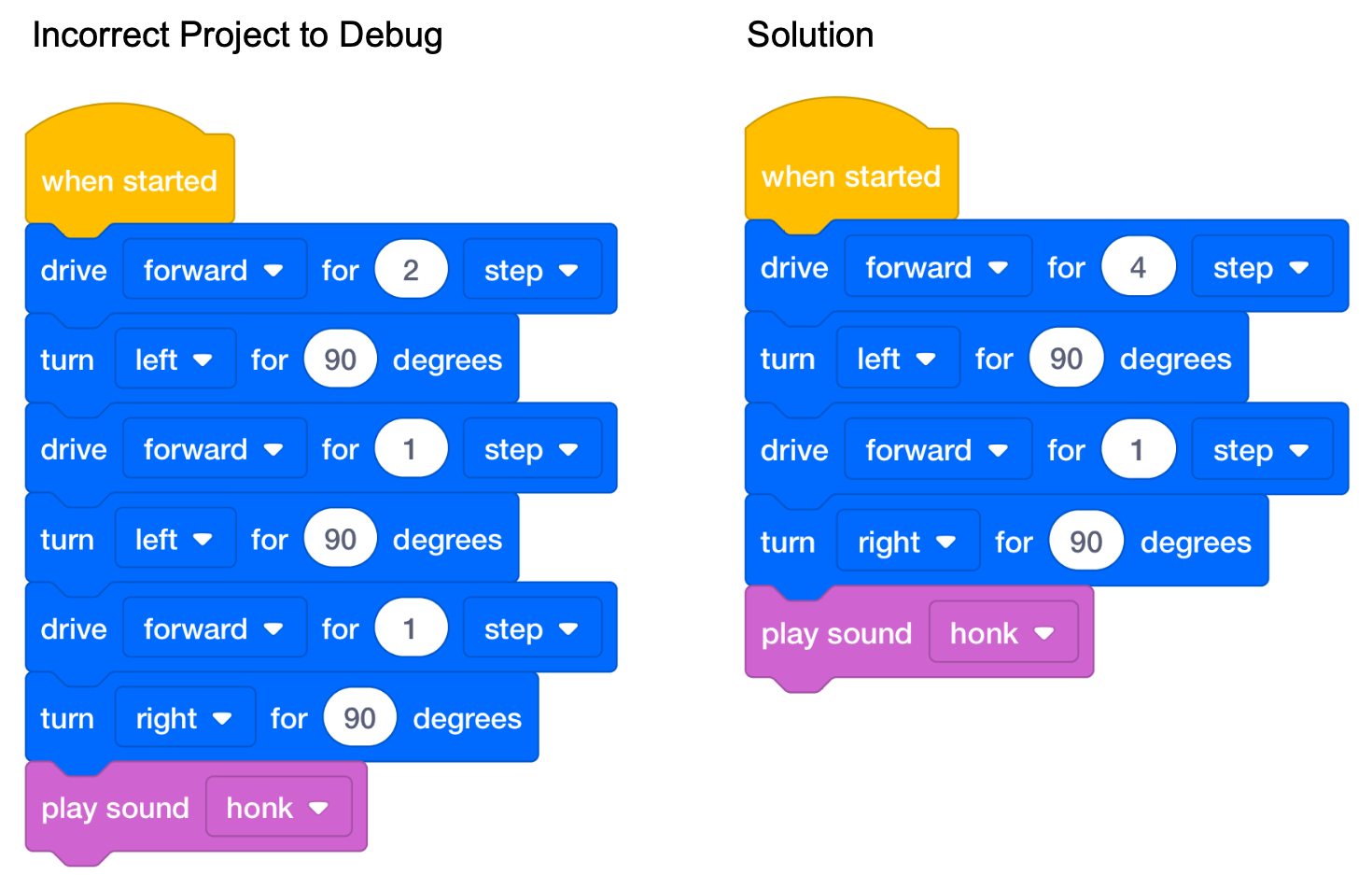
ในห้องปฏิบัติการที่ 4 นักเรียนจะได้ฝึกทำโปรเจกต์การดีบัก ให้นักเรียนมีพฤติกรรมที่ตั้งใจไว้และ โครงการ VEXcode 123 ที่ไม่ถูกต้องเพื่อแก้จุดบกพร่อง พฤติกรรมที่ตั้งใจ: ขับรถ 4 ช่องเลี้ยวซ้ายและสีม่วงเรืองแสงขับรถ 1 ช่องเลี้ยวขวาแล้วบีบแตร ให้โปรเจกต์ทางด้านซ้ายเพื่อดีบักแก่นักเรียน โครงการ VEXcode 123 ทางด้านขวาเป็นโซลูชัน
Coding Fundamentals Lab 4
การปรับตัวด้วยการสัมผัส
นอกจากนี้คุณยังสามารถปรับหน่วยนี้เพื่อใช้ปุ่มบนหุ่นยนต์ 123 เพื่อทำกิจกรรมในห้องปฏิบัติการเหล่านี้ให้เสร็จสมบูรณ์ นักเรียนควรเข้าใจว่าการกดปุ่มแต่ละครั้งเท่ากับการเคลื่อนไหว 1 ครั้งของหุ่นยนต์ 123 ตัว จากนั้น พวกเขาสามารถสร้างโปรเจกต์ด้วยการกดปุ่มหลายชุด นักเรียน ควร ระบุว่าลำดับที่พวกเขากดปุ่มคือลำดับที่หุ่นยนต์ 123 จะกระทำ พฤติกรรม สำหรับข้อมูลเพิ่มเติมเกี่ยวกับวิธีการใช้หุ่นยนต์ 123 ดูบทความ การใช้คลังหุ่นยนต์ 123STEM สำหรับข้อมูลเพิ่มเติมเกี่ยวกับการเข้ารหัสโดยใช้ปุ่มสัมผัสบนหุ่นยนต์ 123 ตัวโปรดดู การเข้ารหัสด้วยปุ่มสัมผัสบนบทความ 123 Robot STEMLibrary
| ปุ่ม | ชื่อ | พฤติกรรม |
|---|---|---|
 |
เริ่ม | เริ่มโปรเจกต์เมื่อกด |
 |
ย้าย | 123 Robot จะขับเคลื่อนไปข้างหน้าเป็นเวลา 1 ความยาวของหุ่นยนต์หรือ 1 สี่เหลี่ยมจัตุรัสบนฟิลด์ 123 |
 |
ขวา | 123 หุ่นยนต์จะหันไปทางขวา 90 องศา |
 |
ซ้าย | 123 หุ่นยนต์จะหันไปทางซ้าย 90 องศา |
 |
เสียง | 123 Robot จะเล่นเสียงบีบแตร |
- ในการปรับห้องปฏิบัติการ 1 ให้ นักเรียนสร้างโครงการเพื่อให้หุ่นยนต์ 123 ทำพฤติกรรมที่ซับซ้อนเช่นการหมุนเป็นวงกลม ให้นักเรียนแบ่งขั้นตอนที่จำเป็นออกจากนั้นสร้างโปรเจกต์รหัสสัมผัสด้วยปุ่มบนหุ่นยนต์ 123 ตัว นี่คือตัวอย่างของโซลูชันที่เป็นไปได้ที่จะให้หุ่นยนต์หมุนเป็นวงกลม โซลูชันจะแสดงลำดับการกดปุ่มจากซ้ายไปขวา
| 1 | 2 | 3 | 4 |
|---|---|---|---|
|
|
|
|
- ในการปรับ Lab 2 ให้เน้นที่ไอคอนปุ่มในส่วนการมีส่วนร่วมและสัญลักษณ์บน ปุ่มแสดงถึงพฤติกรรมของหุ่นยนต์ 123 อย่างไร จากนั้น ให้นักเรียนใช้ปุ่มบนหุ่นยนต์ 123 ตัวเพื่อสร้างโครงการเพื่อให้หุ่นยนต์ขับเคลื่อนเป็นรูปสี่เหลี่ยมจัตุรัส มีหลายวิธีที่หุ่นยนต์ขับเคลื่อนเป็นสี่เหลี่ยมจัตุรัส นี่เป็นวิธีแก้ปัญหาที่เป็นไปได้ที่จะแสดงการกดปุ่มตามลำดับจากซ้ายไปขวา
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
|---|---|---|---|---|---|---|---|
|
|
|
|
|
|
|
|
- ในการปรับห้องปฏิบัติการ 3 ให้นักเรียนใช้ปุ่มบนหุ่นยนต์ 123 เพื่อสร้างโครงการที่หุ่นยนต์ขับรถจากจุดเริ่มต้นไปยังปลายทางตามที่ระบุโดย Map Challenge Prompt โซลูชันตัวอย่าง นี้จะขับเคลื่อนหุ่นยนต์ 123 ตัวจากสวนสาธารณะไปยังบ้านในการตั้งค่าแผนที่ใน Play Part 1 โซลูชันจะแสดงลำดับการกดปุ่มจากซ้ายไปขวา
| 1 | 2 | 3 | 4 | 5 |
|---|---|---|---|---|
|
|
|
|
|
- การดีบักเป็นจุดสนใจของห้องปฏิบัติการ 4 ให้นักเรียนมีพฤติกรรมที่ตั้งใจและโครงการสัมผัสที่ไม่ถูกต้องเพื่อแก้จุดบกพร่อง ใช้สิ่งต่อไปนี้เป็นพฤติกรรมที่ต้องการ: ขับรถ 4 ช่องเลี้ยวซ้ายขับรถ 1 ช่องเลี้ยวขวาแล้วบีบแตร ให้โปรเจกต์ด้านบนแก่นักเรียนเพื่อแก้จุดบกพร่อง โปรเจกต์การสัมผัสที่ด้านล่างคือการแก้ปัญหา โปรเจกต์รหัสสัมผัสด้าน ล่าง แสดงลำดับการกดปุ่มจากซ้ายไปขวา
- ตารางแรกแสดงโครงการที่จะดีบักเพื่อให้หุ่นยนต์ 123 ทำ "พฤติกรรมที่ตั้งใจไว้ข้างต้นให้เสร็จสมบูรณ์ ปุ่มกดจะเรียงลำดับจากซ้ายไปขวา
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
|---|---|---|---|---|---|---|---|
|
|
|
|
|
|
|
|
- ตารางนี้แสดงโซลูชันโครงการระบบสัมผัสสำหรับพฤติกรรมที่ระบุไว้ข้างต้น ปุ่มกดจะเรียงลำดับจากซ้ายไปขวา
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
|---|---|---|---|---|---|---|---|
|
|
|
|
|
|
|
|