
Pelajaran 3: Memantau Nilai Sensor
Pada Pelajaran sebelumnya, Anda menggunakan Sensor Jarak dan blok perbandingan untuk Robot VR untuk melaju dari awal hingga angka '1' pada Wall Maze Playground. Dalam Pelajaran ini, Anda akan mempelajari cara memantau nilai dari sensor di Konsol Monitor, dan menjalankan Robot VR dari awal hingga huruf 'B' di Wall Maze Playground.

Hasil belajar
- Identifikasi bahwa nilai Sensor Jarak dapat dipantau dengan memilih dan menyeret blok <Distance found object> atau (Jarak dari) ke ikon Konsol Monitor di Ruang Kerja.
- Jelaskan manfaat kemampuan memantau nilai sensor saat membuat proyek VEXcode VR.
Mulai Proyek Baru
-
Mulai proyek baru di VEXcode VR dan beri nama proyek Unit5Lesson3.

Berkendara ke Huruf 'B'
-
Pelajaran ini akan membangun proyek untuk Robot VR untuk melaju ke huruf 'B' di Wall Maze Playground menggunakan Sensor Jarak.
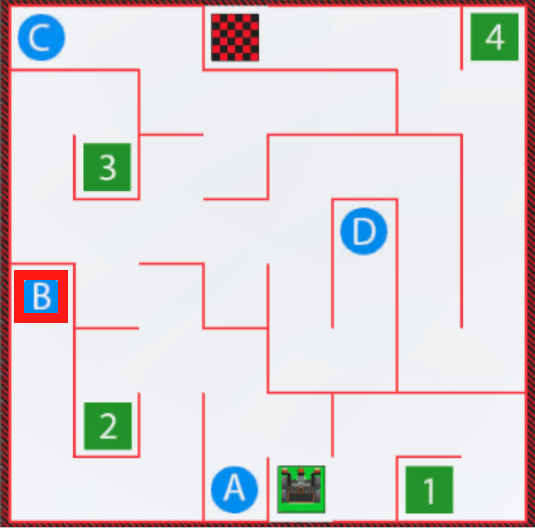
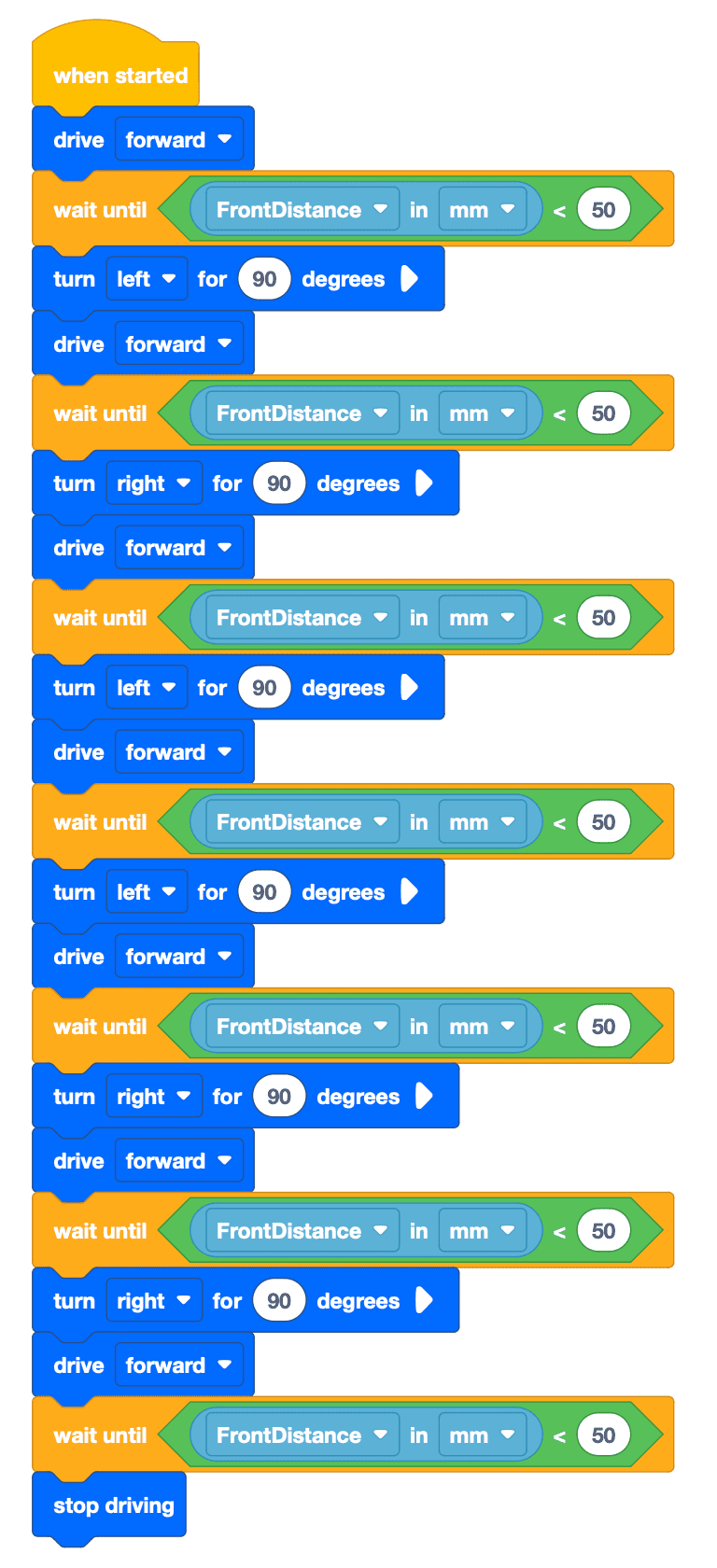
- Bangun proyek VEXcode VR berikut menggunakan blok VEXcode, blok Switch, atau kombinasi keduanya. Sasaran pelajaran ini adalah untuk mengarahkan ke huruf 'B', tetapi proyek berikut memiliki kesalahan.
- Luncurkan Wall Maze Playground jika belum terbuka dan jalankan proyeknya.
- Perhatikan bahwa Robot VRhuruf 'B'. Mengapa tidak? Jalankan proyek lagi untuk mengidentifikasi kesalahan.
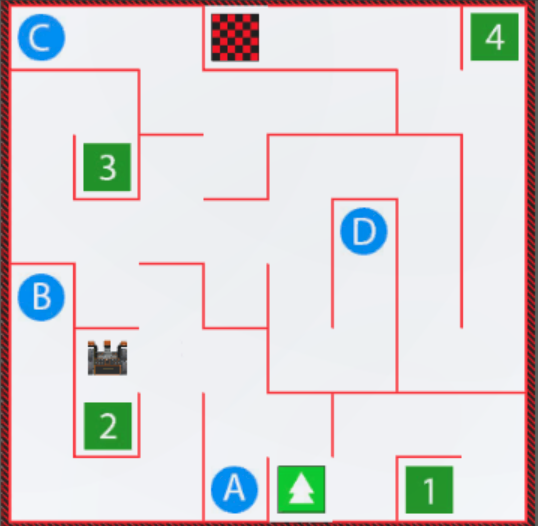
- Saat Robot VR mencapai titik ini di Wall Maze, Robot VR perlu berbelok ke kiri untuk mencapai huruf 'B.' Pada putaran ini, Robot VR berada lebih jauh dari dinding dibandingkan putaran lainnya. Sensor Jarak dapat digunakan untuk memungkinkan Robot VR melakukan belokan pada jarak berapa pun dari dinding.
Pilih tombol Berikutnya untuk melanjutkan sisa Pelajaran ini.