
പാഠം 3: സെൻസർ മൂല്യങ്ങൾ നിരീക്ഷിക്കൽ
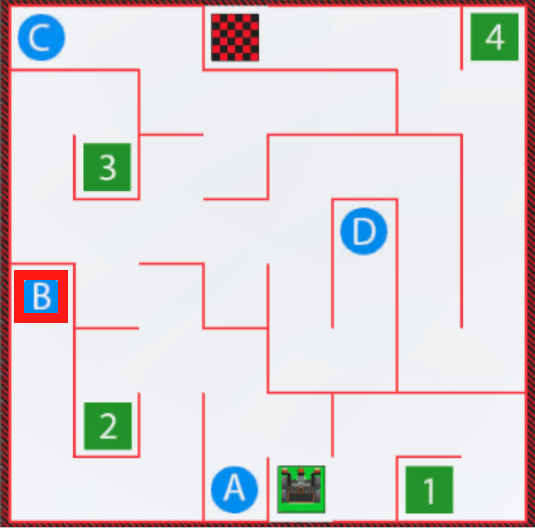
മുൻ പാഠത്തിൽ, വാൾ മെയ്സ് പ്ലേഗ്രൗണ്ട്ൽ തുടക്കം മുതൽ '1' എന്ന നമ്പറിലേക്ക് ഡ്രൈവ് ചെയ്യാൻ VR റോബോട്ടിനായി നിങ്ങൾ ഡിസ്റ്റൻസ് സെൻസറും താരതമ്യ ബ്ലോക്കുകളും ഉപയോഗിച്ചു. ഈ പാഠത്തിൽ, മോണിറ്റർ കൺസോളിലെ സെൻസറുകളിൽ നിന്നുള്ള മൂല്യങ്ങൾ എങ്ങനെ നിരീക്ഷിക്കാമെന്നും, വാൾ മെയ്സ് പ്ലേഗ്രൗണ്ട്ൽ തുടക്കം മുതൽ 'B' എന്ന അക്ഷരം വരെ VR റോബോട്ട് ഡ്രൈവ് എങ്ങനെ നടത്താമെന്നും നിങ്ങൾ പഠിക്കും.

പഠന ഫലങ്ങൾ
- വർക്ക്സ്പെയ്സിലെ മോണിറ്റർ കൺസോൾ ഐക്കണിലേക്ക് <Distance found object> അല്ലെങ്കിൽ (Distance from) ബ്ലോക്ക് തിരഞ്ഞെടുത്ത് വലിച്ചിടുന്നതിലൂടെ ഡിസ്റ്റൻസ് സെൻസറിന്റെ മൂല്യം നിരീക്ഷിക്കാൻ കഴിയുമെന്ന് തിരിച്ചറിയുക.
- VEXcode VR പ്രോജക്ടുകൾ സൃഷ്ടിക്കുമ്പോൾ സെൻസർ മൂല്യങ്ങൾ നിരീക്ഷിക്കാൻ കഴിയുന്നതിന്റെ പ്രയോജനം വിവരിക്കുക.
ഒരു പുതിയ പദ്ധതി ആരംഭിക്കുക
-
VEXcode VR-ൽ ഒരു പുതിയ പ്രോജക്റ്റ് ആരംഭിച്ച് പ്രോജക്റ്റിന് എന്ന് പേരിടുക Unit5Lesson3.

'B' എന്ന അക്ഷരത്തിലേക്ക് ഡ്രൈവ് ചെയ്യുക
-
ഡിസ്റ്റൻസ് സെൻസർ ഉപയോഗിച്ച് വാൾ മെയ്സ് പ്ലേഗ്രൗണ്ട് ലെ 'B' എന്ന അക്ഷരത്തിലേക്ക് VR റോബോട്ടിനെ ഡ്രൈവ് ചെയ്യുന്നതിനുള്ള ഒരു പ്രോജക്റ്റ് ഈ പാഠം നിർമ്മിക്കും.
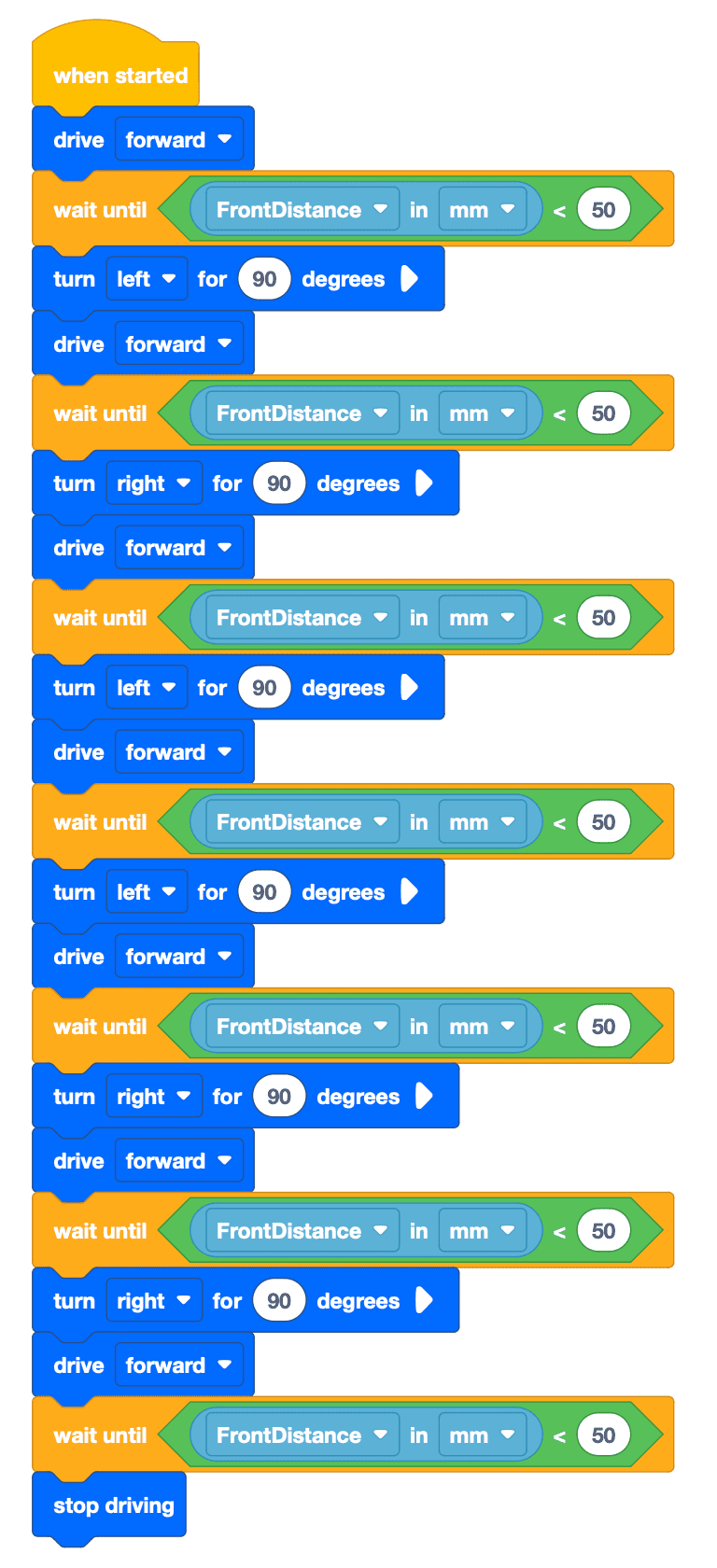
- VEXcode ബ്ലോക്കുകൾ, സ്വിച്ച് ബ്ലോക്കുകൾ, അല്ലെങ്കിൽ രണ്ടും കൂടിച്ചേർന്ന് ഉപയോഗിച്ച് ഇനിപ്പറയുന്ന VEXcode VR പ്രോജക്റ്റ് നിർമ്മിക്കുക. ഈ പാഠത്തിന്റെ ലക്ഷ്യം 'B' എന്ന അക്ഷരത്തിലേക്ക് ഡ്രൈവ് ചെയ്യുക എന്നതാണ്, പക്ഷേ ഇനിപ്പറയുന്ന പ്രോജക്റ്റിൽ ഒരു പിശകുണ്ട്.
- വാൾ മെയ്സ് പ്ലേഗ്രൗണ്ട് തുറന്നിട്ടില്ലെങ്കിൽ അത് സമാരംഭിച്ച് പ്രോജക്റ്റ് പ്രവർത്തിപ്പിക്കുക.
- ശ്രദ്ധിക്കുക, VR റോബോട്ട് 'B' എന്ന അക്ഷരത്തിൽ എത്തുന്നത്അല്ലആണ്. എന്തുകൊണ്ട്? പിശക് തിരിച്ചറിയാൻ പ്രോജക്റ്റ് വീണ്ടും പ്രവർത്തിപ്പിക്കുക.
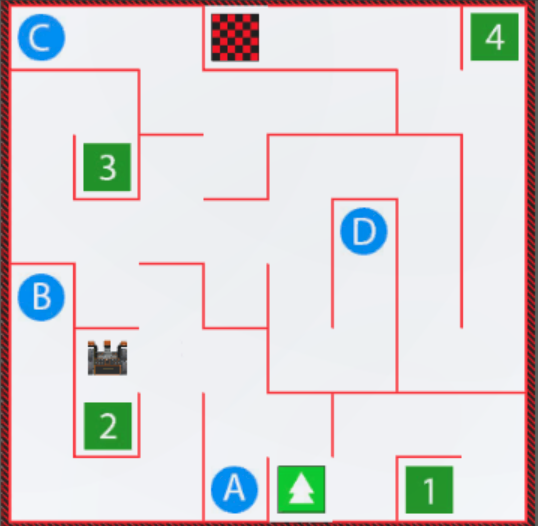
- വാൾ മേസിലെ ഈ സ്ഥാനത്ത് VR റോബോട്ട് എത്തുമ്പോൾ, 'B' എന്ന അക്ഷരത്തിൽ എത്താൻ VR റോബോട്ട് ഇടത്തേക്ക് തിരിയേണ്ടതുണ്ട്. ഈ വളവിൽ, മറ്റ് വളവുകളെ അപേക്ഷിച്ച് വിആർ റോബോട്ട് മതിലിൽ നിന്ന് കൂടുതൽ അകലെയാണ്. ഡിസ്റ്റൻസ് സെൻസർ ഉപയോഗിച്ച് VR റോബോട്ടിന് ഒരു ഭിത്തിയിൽ നിന്ന് എത്ര ദൂരെയാണെങ്കിലും തിരിവുകൾ നടത്താൻ കഴിയും.
ഈ പാഠത്തിന്റെ ബാക്കി ഭാഗം തുടരാൻ അടുത്തത് ബട്ടൺ തിരഞ്ഞെടുക്കുക.