
पाठ 3: सेंसर मानों की निगरानी
पिछले पाठ में, आपने वीआर रोबोट को वॉल भूलभुलैया खेल के मैदानपर शुरुआत से नंबर '1' तक ड्राइव करने के लिए दूरी सेंसर और तुलना ब्लॉक का उपयोग किया था। इस पाठ में, आप सीखेंगे कि मॉनिटर कंसोल में सेंसर से मूल्यों की निगरानी कैसे करें, और वीआर रोबोट को वॉल भूलभुलैया खेल के मैदानपर अक्षर 'बी' तक कैसे चलाएं।

सीखने के परिणाम
- पहचानें कि दूरी सेंसर के मान की निगरानी कार्यस्थान में मॉनिटर कंसोल आइकन पर <Distance found object> या (दूरी से) ब्लॉक का चयन करके और उसे खींचकर की जा सकती है।
- VEXcode VR प्रोजेक्ट बनाते समय सेंसर मानों की निगरानी करने में सक्षम होने के लाभ का वर्णन करें।
एक नई परियोजना शुरू करें
-
VEXcode VR में एक नया प्रोजेक्ट शुरू करें और प्रोजेक्ट का नाम Unit5Lesson3रखें।

अक्षर 'B' तक ड्राइव करें
-
यह पाठ दूरी सेंसर का उपयोग करके वॉल भूलभुलैया खेल के मैदान पर अक्षर 'बी' तक ड्राइव करने के लिए वीआर रोबोट के लिए एक परियोजना का निर्माण करेगा।
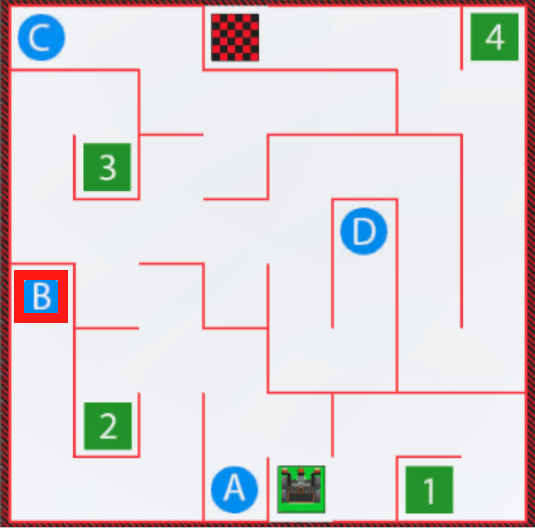
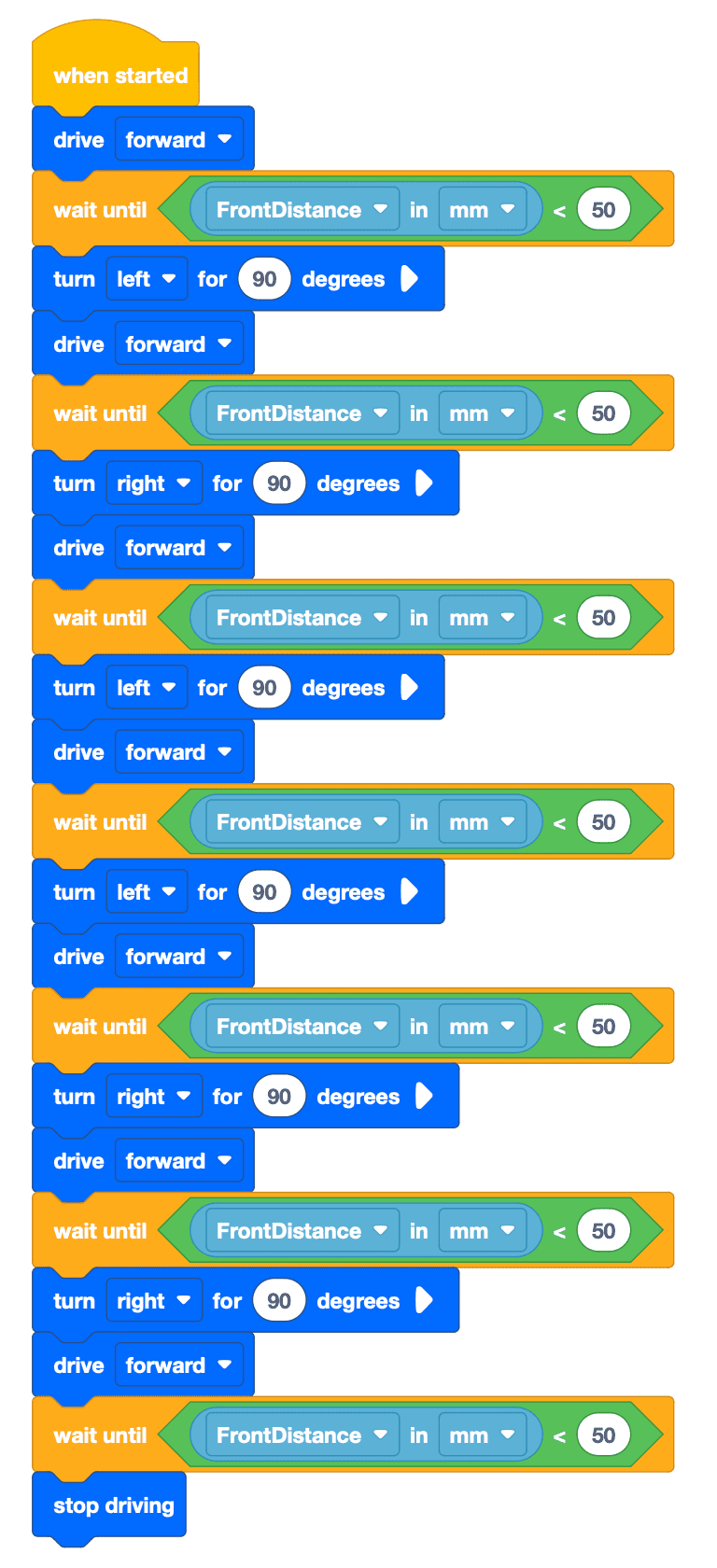
- VEXcode ब्लॉक, स्विच ब्लॉक, या दोनों प्रकार के संयोजन का उपयोग करके निम्नलिखित VEXcode VR प्रोजेक्ट बनाएं। इस पाठ का लक्ष्य अक्षर 'B' तक पहुंचना है, लेकिन निम्नलिखित परियोजना में एक त्रुटि है।
- यदि वॉल मेज़ प्लेग्राउंड पहले से खुला नहीं है तो उसे लॉन्च करें और प्रोजेक्ट चलाएं।
- ध्यान दें कि VR रोबोट अक्षर 'B' तकनहीं बल्किपहुंचता है। क्यों नहीं? त्रुटि की पहचान करने के लिए प्रोजेक्ट को पुनः चलाएँ।
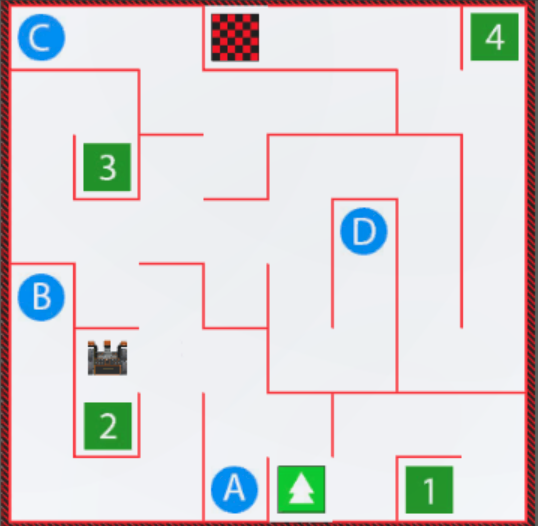
- जब वीआर रोबोट दीवार भूलभुलैया में इस बिंदु पर पहुंचता है, तो वीआर रोबोट को अक्षर 'बी' तक पहुंचने के लिए बाएं मुड़ना पड़ता है। इस मोड़ पर, वीआर रोबोट अन्य मोड़ों की तुलना में दीवार से अधिक दूर है। दूरी सेंसर का उपयोग वीआर रोबोट को दीवार से किसी भी दूरी पर मोड़ लेने की अनुमति देने के लिए किया जा सकता है।
इस पाठ के शेष भाग को जारी रखने के लिए अगला बटन का चयन करें।