
Koneksi Kompetisi: Titik Balik - Berbasis Blok
Kemampuan Robot
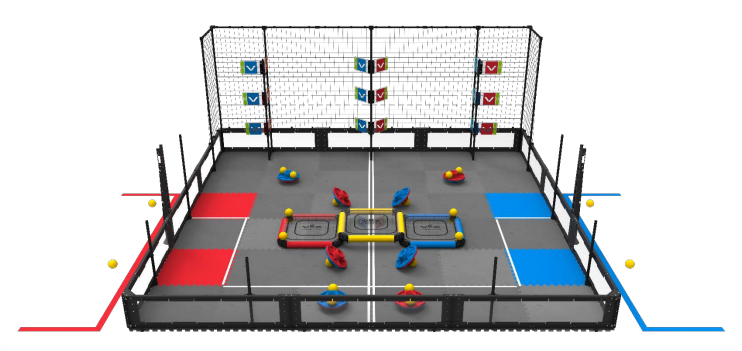
Permainan Kompetisi Robotika VEX 2018-2019 Turning Point mengharuskan pemain untuk mengganti bendera di antara elemen permainan lainnya. Totalnya ada sembilan bendera: tiga bendera bawah yang dapat diubah-ubah oleh robot, dan enam bendera tinggi yang hanya dapat diubah-ubah dengan memukulnya menggunakan potongan permainan bola kompetisi. Tim kompetisi perlu menemukan cara untuk mencapai bendera yang lebih tinggi menggunakan peluncur bola. Jika Anda dapat membayangkan, memprogram robot untuk memukul bendera menggunakan potongan permainan bola dengan pengukuran mungkin tidak selalu akurat. Jika robot melakukan satu kali kesalahan belok selama periode otonom, ada kemungkinan tidak ada satu pun bendera yang terkena karena perhitungannya salah. Demikian pula, untuk tantangan Keterampilan Mengemudi, mungkin sulit bagi tim untuk secara manual menyelaraskan robot agar dapat meluncurkan bola dengan benar.
Permainan Kompetisi Robotika VEX sering kali menggunakan elemen permainan berwarna berbeda dan karenanya, keuntungan besar adalah merancang robot dengan Sensor Penglihatan. Dalam permainan Turning Point, misalnya, Sensor Penglihatan dapat digunakan untuk mendeteksi bendera dan kemudian menyelaraskan robot dengan tepat agar dapat melakukan tembakan akurat. Penting untuk dicatat bahwa Sensor Penglihatan sensitif terhadap pencahayaan di lingkungan yang berbeda. Dalam pengaturan kompetisi, ada waktu untuk menyetel Sensor Penglihatan dan menyetel Sensor Penglihatan merupakan praktik penting yang harus diadopsi oleh tim.
 Perluas Pembelajaran Anda
Perluas Pembelajaran Anda
Untuk memperluas kegiatan ini, mintalah siswa Anda untuk merancang dan menguraikan proyek yang akan membuat robot bergerak menuju objek kuning yang terdeteksi, yang berpotensi dapat mereka gunakan untuk permainan kompetisi ini!
siswa Anda untuk melakukan hal berikut:
-
Buka proyek contoh Clawbot (Drivetrain, Tanpa Gyro).

-
Gunakan proyek contoh Mendeteksi Objek (Visi) sebagai referensi saat memprogram Sensor Visi.
-
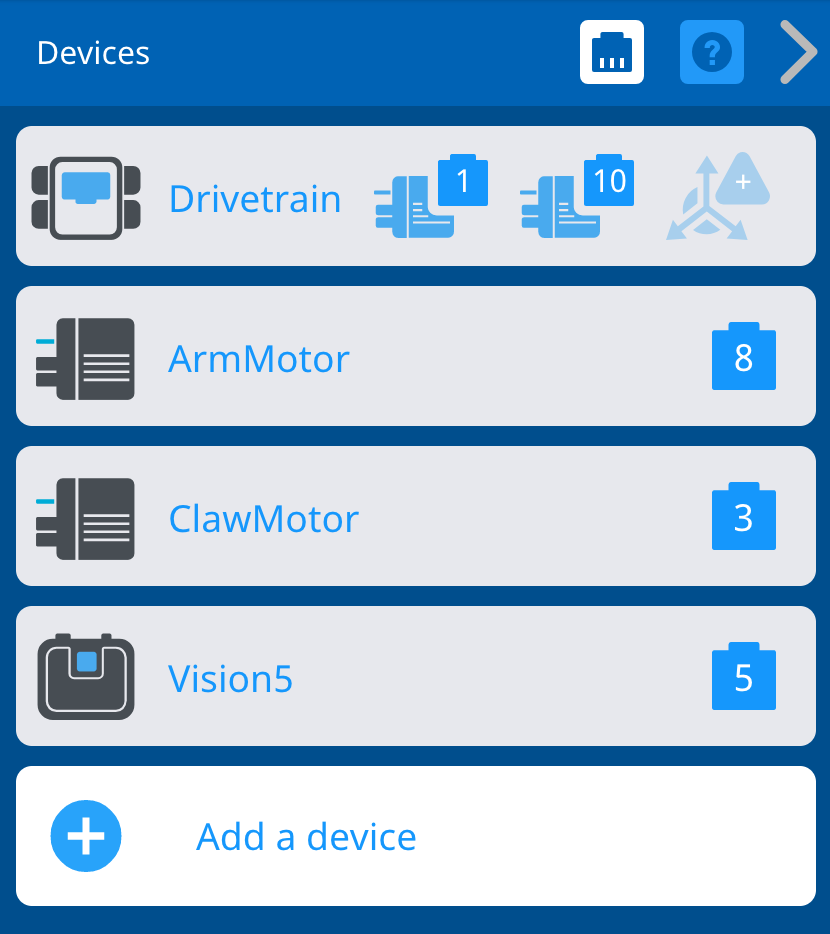
Tambahkan Sensor Penglihatan ke konfigurasi Clawbot (Drivetrain, Tanpa Gyro) lalu konfigurasikan Sensor Penglihatan untuk mendeteksi objek merah dan biru. Lihat tutorial Mengonfigurasi Sensor Penglihatan atau klikdi siniuntuk informasi lebih lanjut.
- Program Clawbot untuk bergerak menuju objek yang terdeteksi. Clawbot bahkan dapat diprogram untuk mengangkat lengannya seolah-olah ingin mengaktifkan bendera!
- Unduh dan Jalankanproyek untuk mengamati apakah Sensor Penglihatan dapat mendeteksi objek kuning seperti bola kuning dalam permainan VRC Turning Point. Jika Sensor Penglihatan dapat mendeteksi objek, apakah robot bergerak berdasarkan objek yang terdeteksi tersebut? Untuk bantuan, lihat video tutorial Unduh dan Jalankan Proyek.
- Bila waktu memungkinkan, buatlah lapangan permainan yang mirip dengan lapangan Turning Point. Berlatihlah menggunakan Sensor Penglihatan untuk memungkinkan robot bergerak dan mencetak poin!