
प्रतियोगिता कनेक्शन: टर्निंग पॉइंट - ब्लॉक-आधारित
रोबोट क्षमताएं
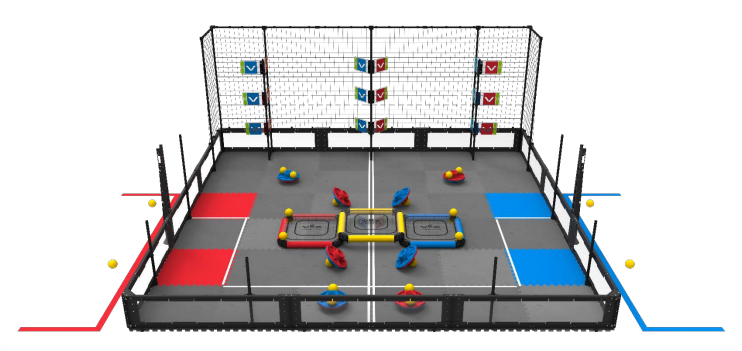
2018 - 2019 VEX रोबोटिक्स प्रतियोगिता गेम टर्निंग पॉइंट में खिलाड़ियों को अन्य गेम तत्वों के बीच झंडे को टॉगल करने की आवश्यकता थी। कुल नौ झंडे थे: तीन नीचे वाले झंडे जिन्हें रोबोट द्वारा घुमाया जा सकता था, और छह ऊंचे झंडे जिन्हें केवल प्रतियोगिता गेंद के टुकड़ों से मारकर घुमाया जा सकता था। प्रतियोगिता टीमों को बॉल लांचर का उपयोग करके ऊंचे झंडों पर निशाना लगाने का तरीका ढूंढना था। यदि आप कल्पना कर सकते हैं, तो गेंद के टुकड़ों का उपयोग करके झंडे को मारने के लिए रोबोट को प्रोग्राम करना हमेशा सटीक नहीं हो सकता है। यदि रोबोट स्वायत्त अवधि के दौरान एक भी गलत मोड़ ले लेता है, तो ऐसी संभावना है कि कोई भी झंडा नहीं टकराएगा, क्योंकि गणना गलत हो जाएगी। इसी तरह, ड्राइविंग कौशल चुनौती के लिए, टीमों के लिए गेंद को ठीक से लॉन्च करने के लिए रोबोट को मैन्युअल रूप से पंक्तिबद्ध करना कठिन हो सकता है।
VEX रोबोटिक्स प्रतियोगिता खेलों में अक्सर अलग-अलग रंग के खेल तत्वों का उपयोग किया जाता है और इसलिए, एक विज़न सेंसर के साथ रोबोट को डिज़ाइन करना एक बड़ा लाभ होगा। उदाहरण के लिए, टर्निंग प्वाइंट गेम में, विज़न सेंसर का उपयोग झंडों का पता लगाने और फिर सटीक शॉट लगाने के लिए रोबोट को सही ढंग से संरेखित करने के लिए किया जा सकता था। यह ध्यान रखना महत्वपूर्ण है कि विज़न सेंसर विभिन्न वातावरणों में प्रकाश के प्रति संवेदनशील होते हैं। प्रतियोगिता के दौरान, विज़न सेंसर को ट्यून करने का समय होता है और विज़न सेंसर को ट्यून करना एक महत्वपूर्ण अभ्यास है जिसे टीमों को अपनाना चाहिए।
![]() अपनी शिक्षा का विस्तार करें
अपनी शिक्षा का विस्तार करें
इस गतिविधि को आगे बढ़ाने के लिए, अपने विद्यार्थियों से एक प्रोजेक्ट डिज़ाइन और रूपरेखा बनाने को कहें जिसमें रोबोट उन पीली वस्तुओं की ओर बढ़ेगा जिनका उपयोग वे संभावित रूप से इस प्रतियोगिता खेल में कर सकते हैं! अपने विद्यार्थियों से निम्नलिखित कार्य करने को
:
-
क्लॉबोट (ड्राइवट्रेन, नो गायरो) उदाहरण प्रोजेक्ट खोलें।

-
विज़न सेंसर को प्रोग्राम करते समय संदर्भ के रूप में डिटेक्टिंग ऑब्जेक्ट्स (विज़न) उदाहरण प्रोजेक्ट का उपयोग करें।
-
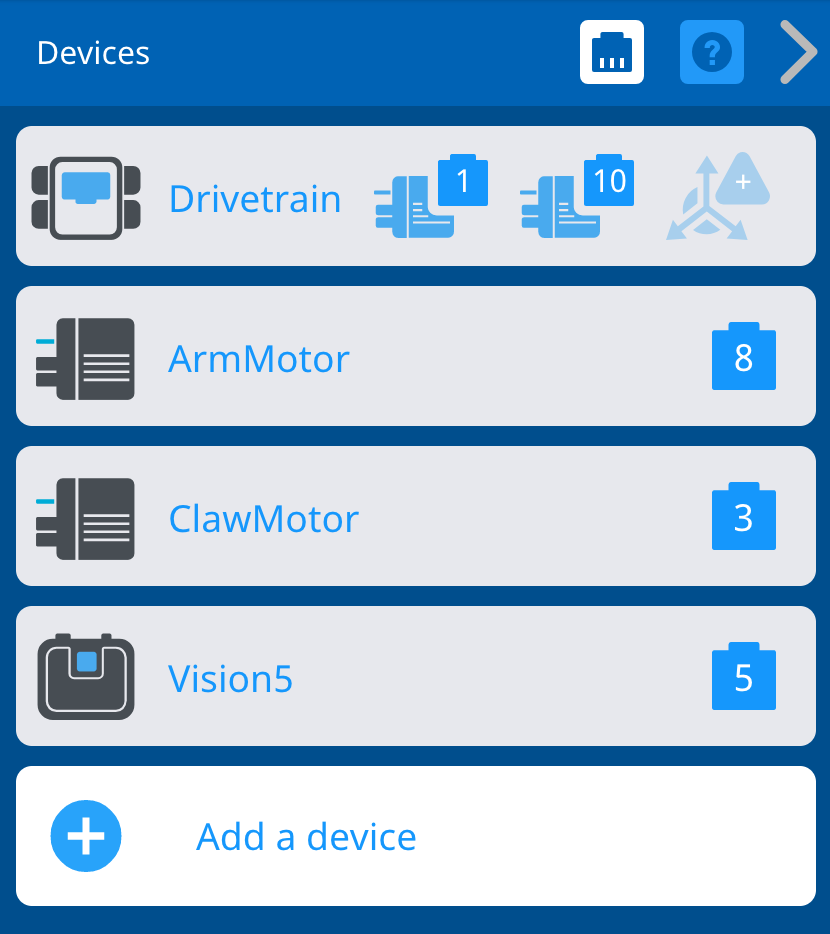
क्लॉबोट (ड्राइवट्रेन, नो गायरो) कॉन्फ़िगरेशन में विज़न सेंसर जोड़ें और फिर लाल और नीली वस्तुओं का पता लगाने के लिए विज़न सेंसर को कॉन्फ़िगर करें। अधिक जानकारी के लिए विज़न सेंसर कॉन्फ़िगर करने संबंधी ट्यूटोरियल देखें या यहांपर क्लिक करें।
- क्लॉबोट को पता लगाई गई वस्तु की ओर बढ़ने के लिए प्रोग्राम करें। क्लॉबोट को इस प्रकार प्रोग्राम किया जा सकता है कि वह अपना हाथ ऐसे उठाए जैसे कि वह झंडा लहरा रहा हो!
- यह देखने के लिए कि क्या विज़न सेंसर, VRC टर्निंग पॉइंट गेम में पीले रंग की गेंदों जैसी पीली वस्तुओं का पता लगा सकता है, प्रोजेक्ट डाउनलोड करें और चलाएँ यदि विज़न सेंसर वस्तुओं का पता लगा सकता है, तो क्या रोबोट उन पाई गई वस्तुओं के आधार पर गति करता है? सहायता के लिए, प्रोजेक्ट डाउनलोड करें और चलाएँ ट्यूटोरियल वीडियो देखें।
- यदि समय हो तो टर्निंग प्वाइंट मैदान के समान एक खेल मैदान तैयार करें। रोबोट को अंक अर्जित करने के लिए गति करने की अनुमति देने के लिए विज़न सेंसर का उपयोग करने का अभ्यास करें!