
Latar belakang
Dalam Unit ini, siswa akan mempelajari fitur-fitur VEX GO, melalui pembangunan Basis Kode dan iterasinya untuk menavigasi dengan berbagai cara. Dengan berkembang dari mengendarai Basis Kode melalui kendali jarak jauh, dalam Mode Berkendara, ke pengendaraan melalui kode, ke pengendaraan menggunakan data sensor, siswa akan mampu membangun pemahaman mereka mengenai komponen dan fungsi VEX GO dan VEXcode GO.
Fitur Apa Saja yang Tersedia di VEXcode GO?
VEXcode GO adalah platform pengkodean berbasis blok untuk VEX GO. Untuk menggunakan VEXcode GO dengan robot Anda, Anda perlu mengaturnya di perangkat Anda. Lihat artikel Menyiapkan Pustaka VEX VEXcode GO untuk informasi lebih lanjut, jika Anda belum melakukannya.
Dalam VEXcode GO terdapat banyak fitur yang dapat digunakan untuk mendukung siswa saat mereka mempelajari tentang pengkodean dan konsep STEM di seluruh Unit.
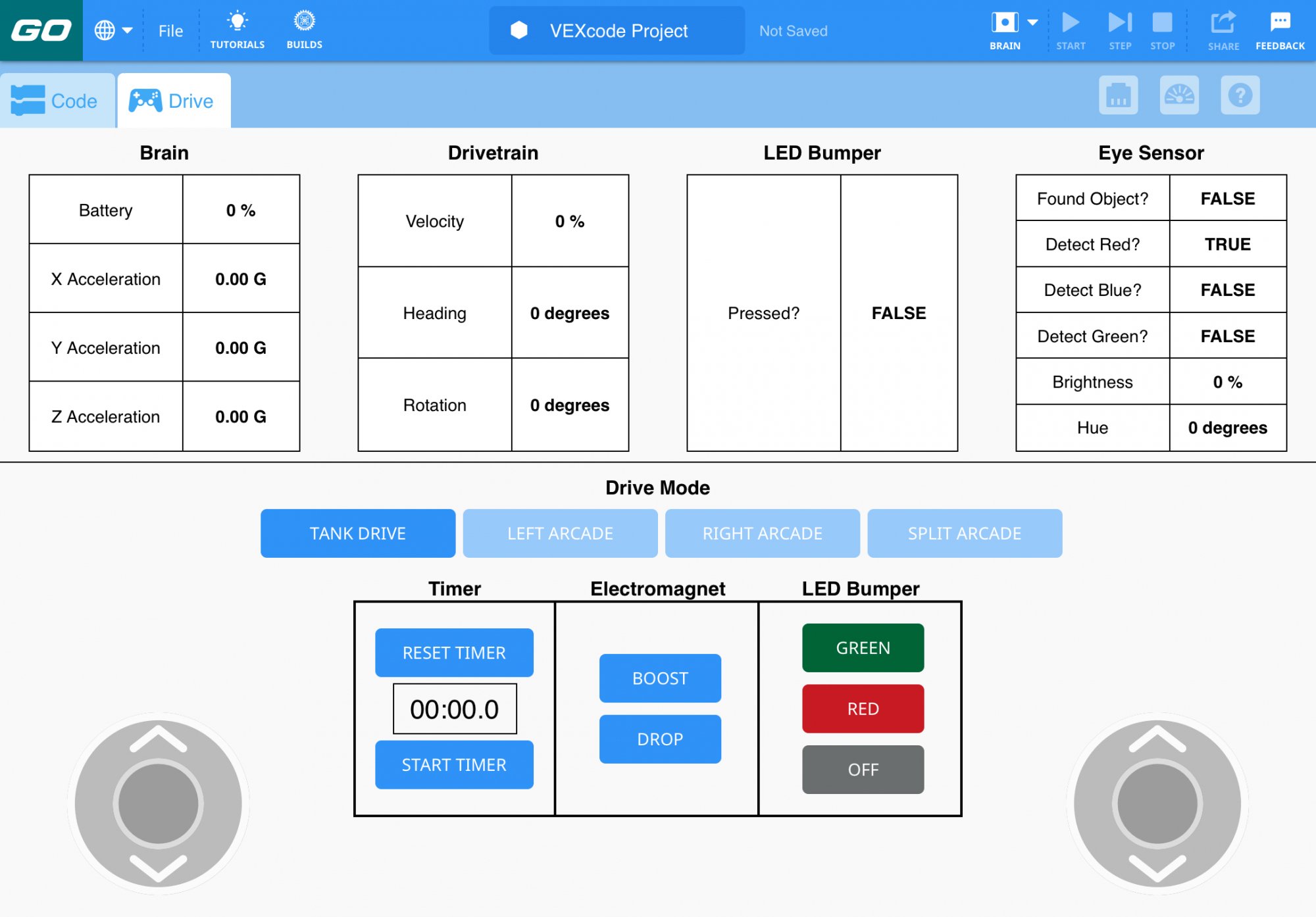
Tab Drive - Lab 1 memperkenalkan siswa untuk mengendalikan Basis Kode menggunakan fitur Kontrol Jarak Jauh, Mode Drive, yang terletak di Tab Drive. Mode Berkendara memungkinkan siswa untuk mulai mengendalikan Basis Kode mereka segera saat mereka menghubungkan Otak ke perangkat mereka, karena telah dikonfigurasikan sebelumnya untuk Basis Kode. Untuk informasi lebih rinci tentang penggunaan Tab Drive, lihat artikel Menggunakan Remote Control di VEXcode GO VEX Library.
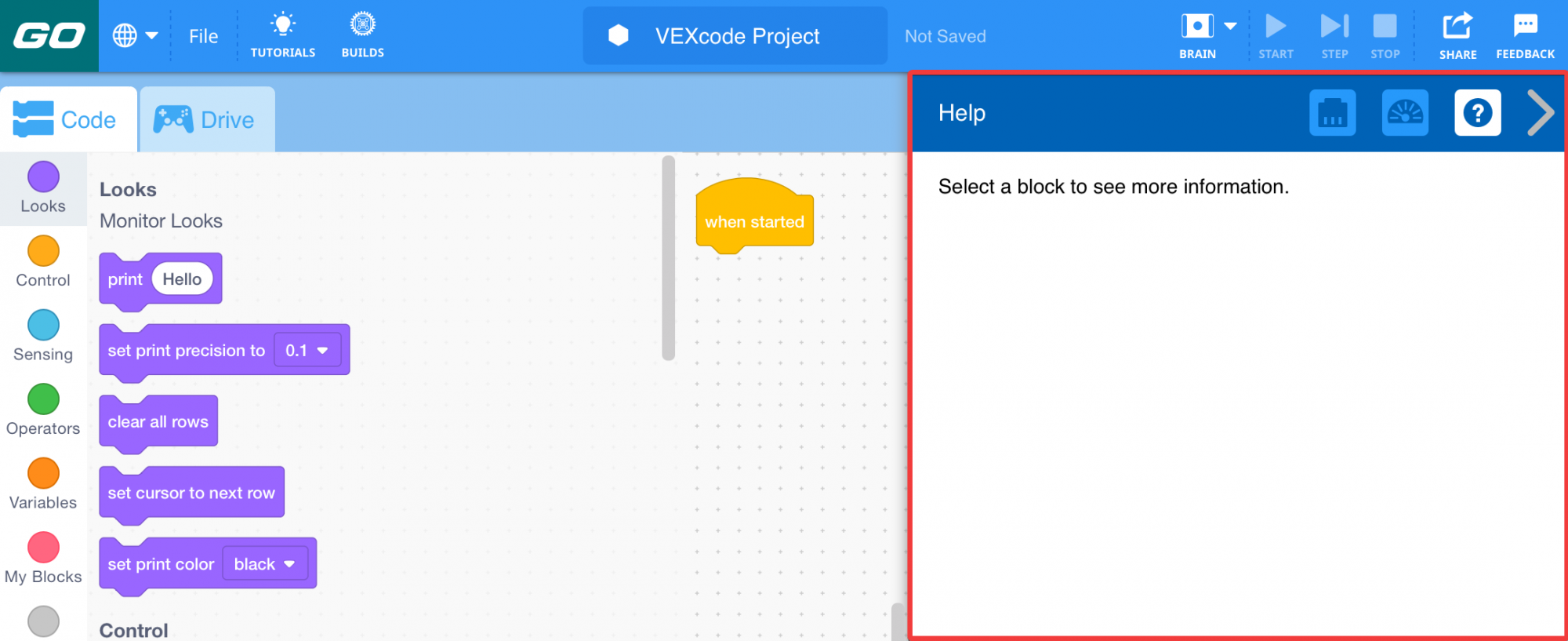
Jendela Bantuan - Fitur Bantuan VEXcode GO dapat digunakan untuk menjelaskan lebih lanjut tentang suatu blok saat Anda bekerja di VEXcode GO. Cukup buka Jendela Bantuan, dan pilih blok yang ingin Anda pelajari. Siswa dapat menggunakan fitur ini saat mereka bekerja, untuk membantu mereka memecahkan masalah proyek mereka sendiri. Untuk informasi lebih lanjut tentang Bantuan VEXcode GO, lihat artikel Mengakses Bantuan Pustaka VEX.
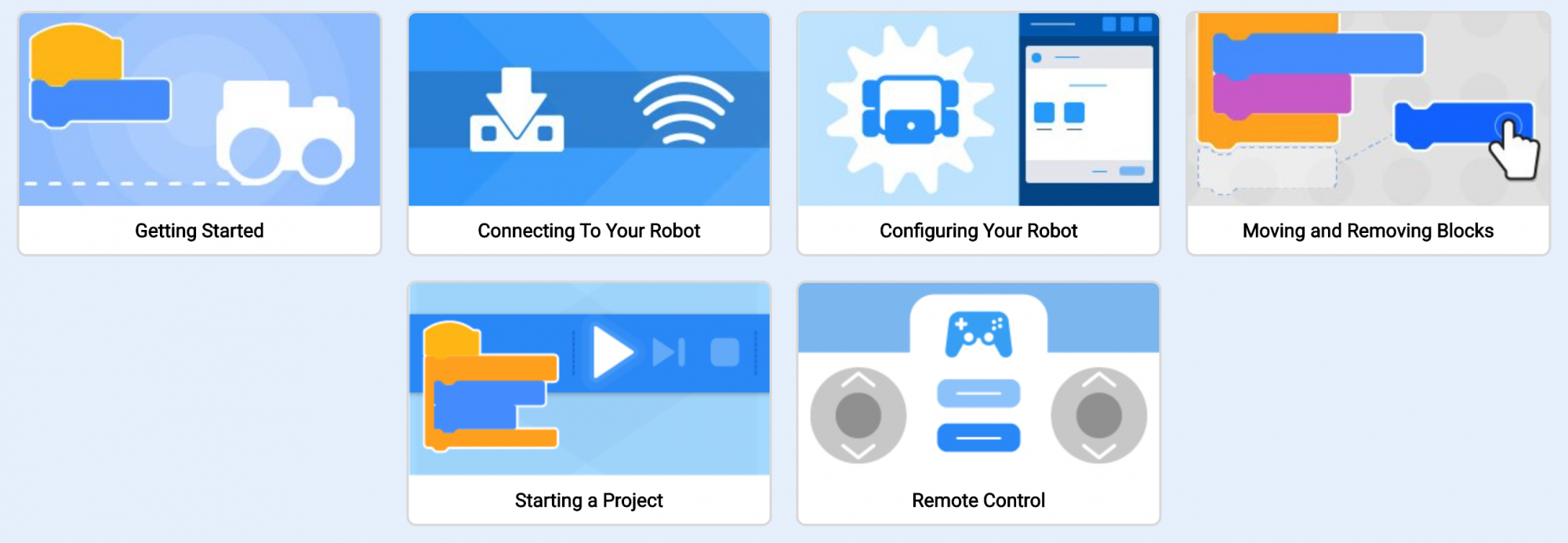
Tutorial - Tutorial adalah video penjelasan singkat yang menunjukkan kepada Anda cara melakukan berbagai hal di VEXcode GO. Mereka tertanam dalam VEXcode GO, dan dapat dilihat dengan memilih 'Tutorial' di Toolbar.
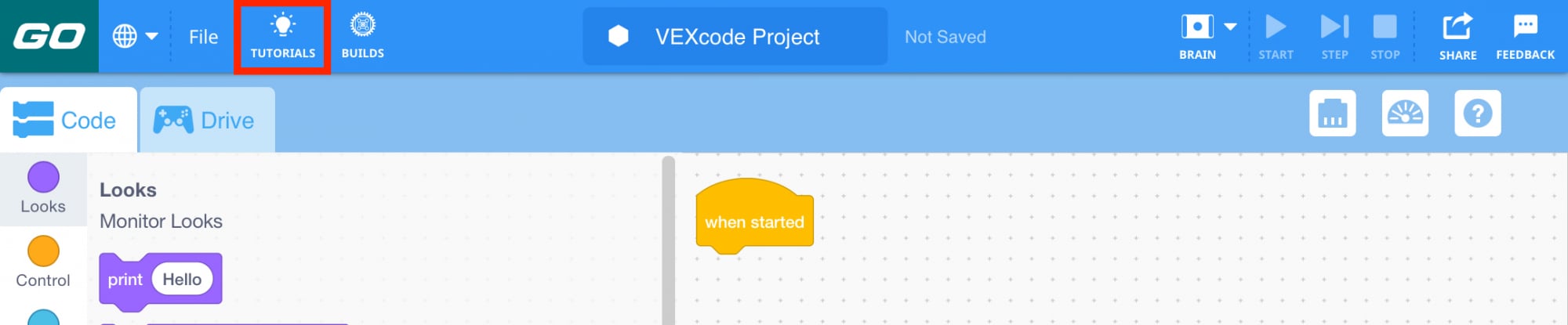
Anda dapat mengarahkan siswa ke video tutorial kapan saja, jika mereka memerlukan bantuan untuk melakukan hal-hal seperti menghubungkan ke robot mereka atau memindahkan dan menghapus balok dari suatu proyek. Mengingatkan siswa untuk memeriksa video tutorial guna mendapatkan jawaban atas pertanyaan mereka terlebih dahulu, dapat membantu Anda meluangkan waktu untuk membantu siswa lain yang mungkin bekerja pada tingkat berbeda.
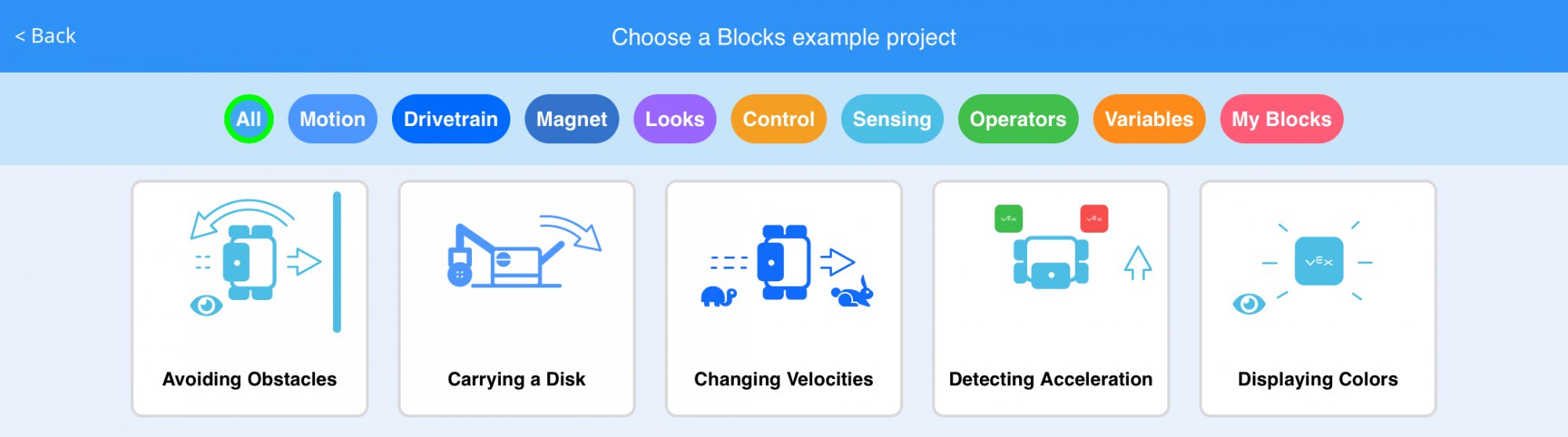
Contoh Proyek - Ini adalah proyek yang dibangun ke dalam VEXcode GO untuk menunjukkan berbagai cara mengodekan robot Anda. Mereka sering menjadi dasar bagi pekerjaan siswa di Laboratorium STEM, seperti halnya dalam Unit ini. Anda juga dapat menggunakan Proyek Contoh sebagai sumber diferensiasi bagi siswa yang mungkin memerlukan lebih banyak waktu untuk mempraktikkan konsep pengkodean tertentu, atau bagi mereka yang dapat mengulanginya untuk mengeksplorasi konsep lebih mendalam. Anda dapat mengakses Proyek Contoh kapan saja dengan memilih Menu File dan 'Buka Contoh.'
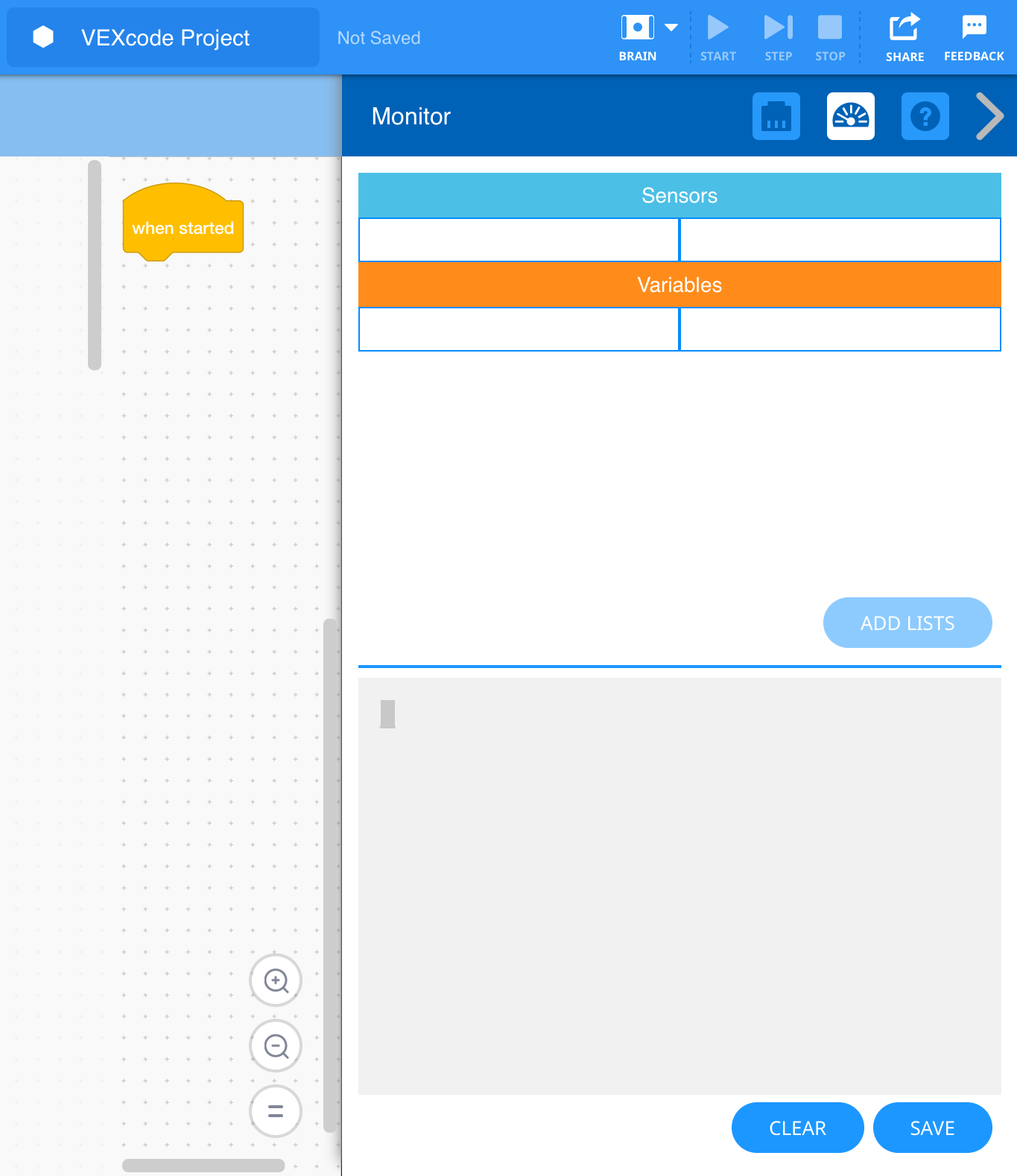
Jendela Monitor - Konsol Monitor di Jendela Monitor menawarkan siswa cara berbeda untuk melihat apa yang terjadi dalam suatu proyek, dengan sensor, atau dengan robot mereka secara real time. Di Lab 4 Unit ini, Konsol Monitor disorot sebagai cara untuk menunjukkan kepada siswa data yang dilaporkan oleh Sensor Mata, menawarkan mereka koneksi visual ke tindakan sensor (yang tidak terlihat jika tidak). Untuk informasi lebih lanjut tentang fitur Monitor Window ini, lihat artikel Pemantauan Nilai Variabel dan Sensor di VEXcode GO VEX Library.
Apa itu Sensor?
Sensor pada hakikatnya adalah perangkat yang membantu robot memahami dunia di sekelilingnya. Hal ini dilakukan dengan mengumpulkan dan melaporkan data tentang lingkungannya, yang kemudian dapat digunakan dalam suatu proyek untuk membuat robot mengambil keputusan, atau melakukan perilaku tertentu. Urutan ini sering disebut sebagai siklus keputusan Sense → Think → Act.
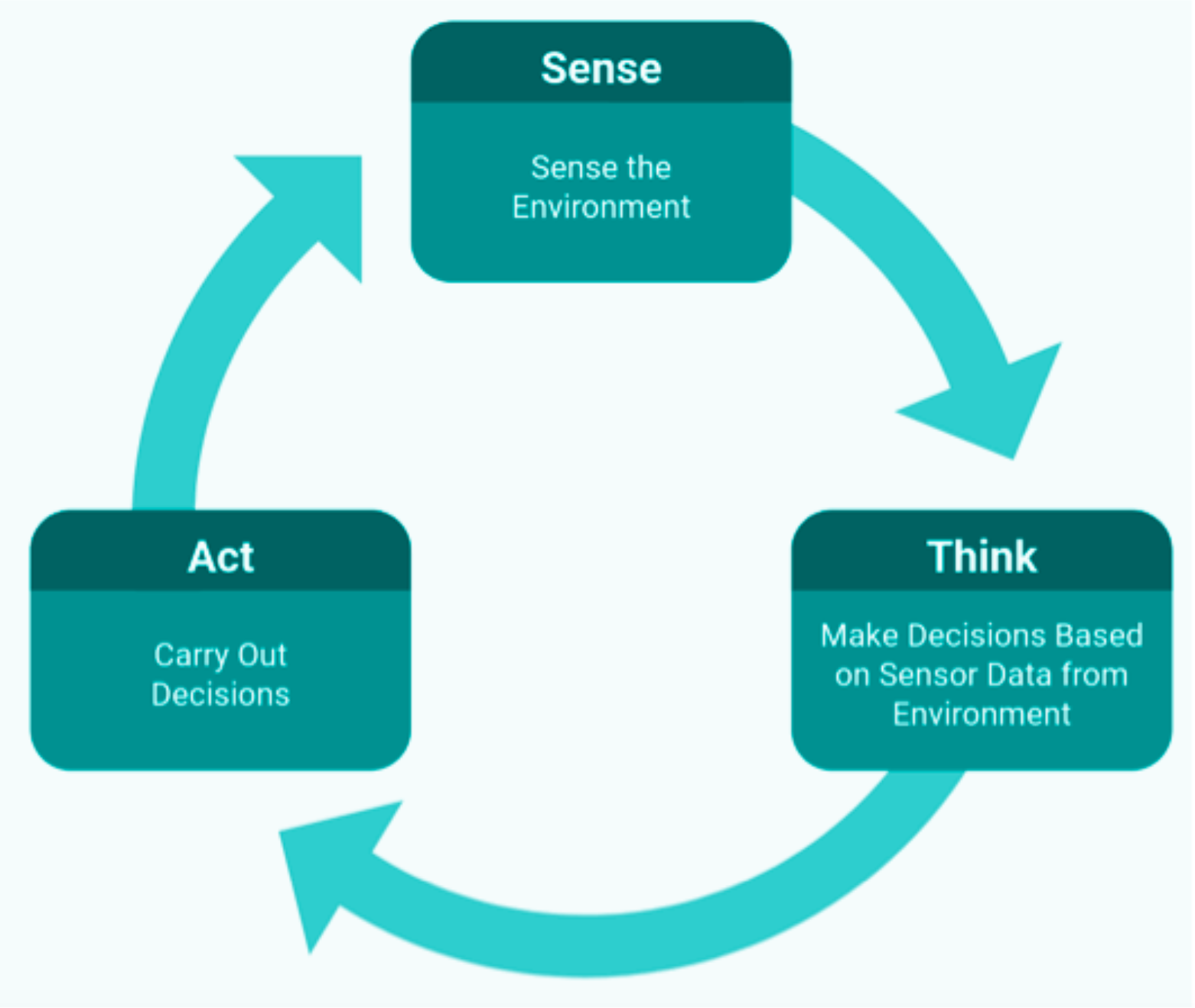
Di Lab 4 misalnya, Sensor Mata digunakan dalam suatu proyek untuk mendeteksi warna suatu objek (sense), menentukan cabang proyek yang akan diikuti (think), lalu menggerakkan Basis Kode berdasarkan warna (act).
Sensor VEX GO apa yang digunakan dalam Unit ini?
LED Bumper adalah sensor yang dapat mendeteksi kontak fisik (apakah LED Bumper ditekan atau dilepaskan), dan menampilkan warna (merah, hijau, atau mati). Dalam proyek, ini dapat digunakan sebagai sakelar, di mana penekanan atau pelepasan LED Bumper menyebabkan terjadinya suatu perilaku, seperti pada Lab 3. Untuk informasi lebih rinci tentang cara kerja LED Bumper, lihat artikel Pengodean dengan VEX GO LED Bumper Pustaka VEX.
Sensor Mata adalah sensor yang dapat menentukan tiga hal - keberadaan suatu objek, warnanya, dan kecerahan suatu objek atau permukaan. Di Lab 4 Unit ini, Sensor Mata digunakan untuk mendeteksi suatu objek dan warnanya untuk menavigasi Labirin Cakram Warna. Data yang dilaporkan oleh Sensor Mata dapat dilihat di Monitor Console, yang menawarkan kepada siswa representasi visual tentang apa yang 'dilihat' robot, dan dapat digunakan untuk membantu mereka membuat hubungan antara sensor dan perilaku robot. Untuk informasi lebih lanjut tentang Sensor Mata dan cara kerjanya, lihat artikel Pengodean dengan VEX GO Eye Sensor VEX Library.