
रोबोट के साथ गुरुत्वाकर्षण केंद्र की खोज
| मात्रा | आवश्यक सामग्री |
|---|---|
| 2 |
VEX V5 क्लासरूम स्टार्टर किट (अप-टू-डेट फर्मवेयर के साथ) |
| 1 |
टेप का रोल |
| 1 |
छोटा रैंप बनाने के लिए सामग्री (लकड़ी, कार्डबोर्ड, बाइंडर, आदि) |
| 1 |
मीटर स्टिक |
| 1 |
इंजीनियरिंग नोटबुक |
चरण 1: स्थान खाली करना
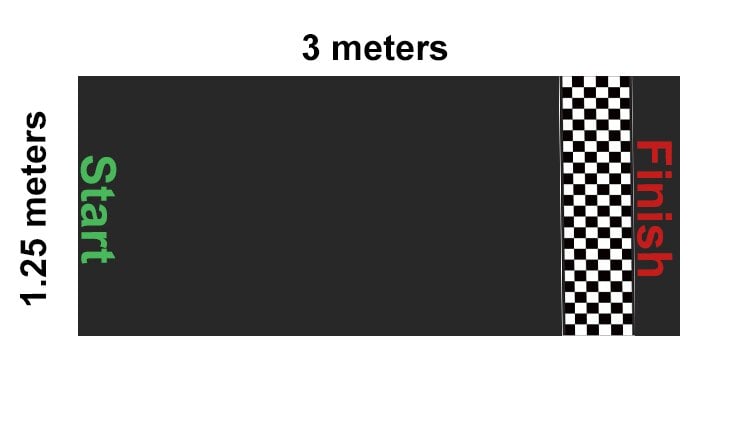
अपने V5 क्लॉबोट के लिए एक कोर्स बनाने में पहला कदम फर्श पर लगभग 3 मीटर (119 इंच) x 1.25 मीटर (49 इंच) का स्थान साफ करना है। यह रेसिंग ट्रैक होगा और इसमें दो क्लॉबोट्स को एक साथ एक ही समय पर रेस करने की अनुमति होगी। टेप से या किसी अन्य तरीके से स्थान को चिह्नित करें ताकि ट्रैक पर प्रारंभ और समापन रेखाएं स्पष्ट रूप से अंकित हो जाएं।
![]() शिक्षक युक्तियाँ
शिक्षक युक्तियाँ
-
3 मीटर (119 इंच) x 1.25 मीटर (49 इंच) का स्थान ढूंढें। जहां स्थान सीमित हो, वहां ट्रैक और रैम्प को छोटा किया जा सकता है, लेकिन ट्रैक की चौड़ाई इतनी होनी चाहिए कि एक ही समय में दो V5 क्लॉबोट्स दौड़ सकें।
-
छात्रों के साथ रणनीति और टीमवर्क (Google / .docx / .pdf) युक्तियों की समीक्षा करके सहकारी शिक्षण कौशल के सचेत विकास को बढ़ावा दें।
-
रैम्प बनाने के लिए सामग्री पहले से ही इकट्ठा कर लें। हार्डवेयर/सॉफ्टवेयर अनुभाग में अनुशंसित सामग्रियां दी गई हैं, लेकिन तीन-रिंग बाइंडर से लेकर प्लाईवुड तक कुछ भी पर्याप्त होगा।
चरण 2: रैंप का निर्माण
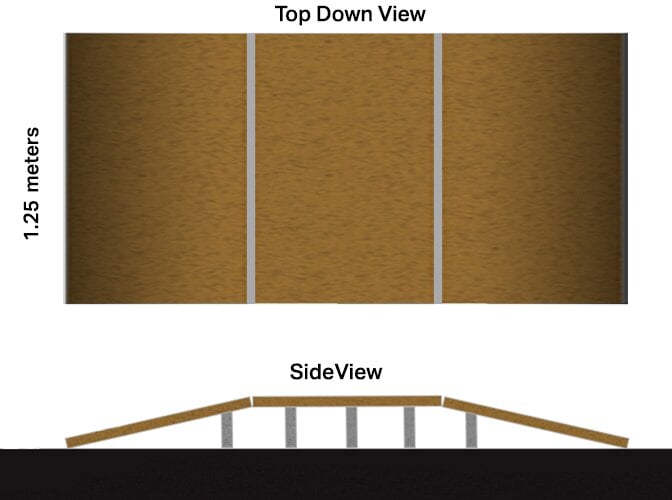
अगला चरण एक रैंप का निर्माण करना है जो पाठ्यक्रम के बराबर चौड़ा हो (लगभग 1.25 मीटर या 49 इंच)। रैम्प का निर्माण लकड़ी, कार्डबोर्ड या किसी भी ऐसी चीज से किया जा सकता है जो दो V5 क्लॉबोट्स का भार सहन करने के लिए पर्याप्त मजबूत हो। रैम्प में दो ढलान होने चाहिए, पहला ऊपर की ओर और फिर नीचे की ओर, तथा ढलान धीरे-धीरे होनी चाहिए ताकि इसके दोनों छोर पर कोई अंतराल न हो।
चरण 3: रैम्प की स्थिति निर्धारित करना
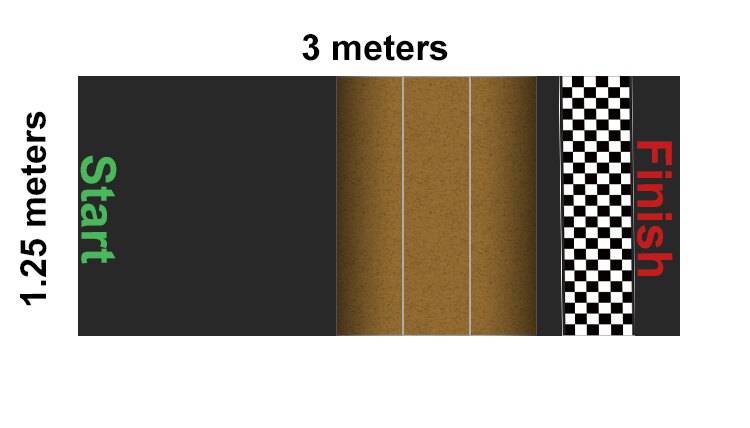
रैम्प को पाठ्यक्रम के दूसरे भाग में ले जाएं। रैम्प प्रारंभिक रेखा से कम से कम 1.5 मीटर (59 इंच) दूर होना चाहिए। सुनिश्चित करें कि रैम्प इस प्रकार स्थित हो कि उसके किनारे ट्रैक के किनारों के समानांतर हों। दूसरे शब्दों में, सुनिश्चित करें कि रैम्प टेढ़ा-मेढ़ा न हो ताकि V5 क्लॉबोट के अगले पहिये ठीक उसी समय रैम्प तक पहुंच सकें।
चरण 4: रोबोट तैयार करना

V5 रोबोट ब्रेन को चालू करें, सुनिश्चित करें कि यहV5 नियंत्रकके साथ युग्मित है, औरV5 रोबोट ब्रेन पर ड्राइव प्रोग्रामचलाएं ताकि आप V5 नियंत्रक के साथ अपने रोबोट को वायरलेस तरीके से चला सकें।
चरण 5: आराम की बांह के साथ दौड़ना
वी5 क्लॉबोट्स को अपनी भुजाओं को आरंभिक या आराम की स्थिति में पूरी तरह नीचे रखना चाहिए।
![]() शिक्षक युक्तियाँ
शिक्षक युक्तियाँ
-
जांच करें कि प्रत्येक V5 क्लॉबोट की भुजा प्रारंभिक या आराम की स्थिति में नीचे आ गई है।
-
टीमों को जोड़ियों में बांटें। पहले राउंड के दौरान, प्रत्येक जोड़ी एक दूसरे के खिलाफ V5 क्लॉबोट्स की दौड़ लगाएगी।
-
यदि टीमों की संख्या असमान हो तो राउंड रॉबिन ब्रैकेट का उपयोग करें।
-
यदि आपके पास चार या अधिक टीमें हैं, तो प्रत्येक राउंड के बाद जोड़ियों को घुमाएं। सुनिश्चित करें कि अगले राउंड में दो सबसे तेज टीमें एक दूसरे का सामना करें, फिर अगली दो सबसे तेज टीमें, और इसी तरह आगे भी।
चरण 6: कोणीय भुजा के साथ दौड़ना
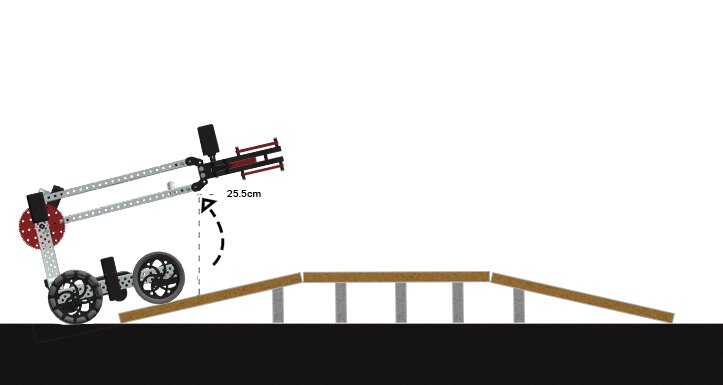
दूसरे राउंड के दौरान, नए जोड़े अपने क्लॉबोट्स के साथ फिर से आमने-सामने की दौड़ लगाएंगे।
इस राउंड में, प्रत्येक क्लॉबोट का हाथ उसकी प्रारंभिक स्थिति से कम से कम 25.5 सेंटीमीटर (लगभग 10 इंच) ऊपर उठा होना चाहिए।
![]() शिक्षक युक्तियाँ
शिक्षक युक्तियाँ
-
प्रत्येक दौड़ से पहले प्रत्येक हाथ की स्थिति की जांच करें ताकि यह सुनिश्चित हो सके कि हाथ सही स्थिति में है।
-
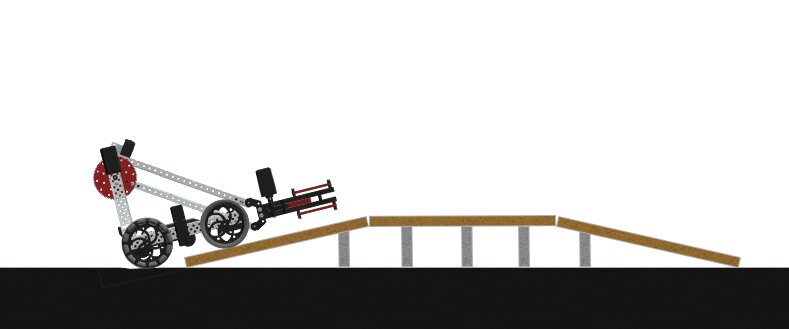
विद्यार्थियों को सूचित करें कि जब पंजे वाला हाथ ऊपर उठाया जाता है तो V5 क्लॉबोट के पलटने की संभावना रहती है (विशेषकर यदि हाथ ऊपर उठा हो और पंजा किसी वस्तु को पकड़े हुए हो)।
चरण 7: लगभग ऊर्ध्वाधर भुजा के साथ दौड़ना
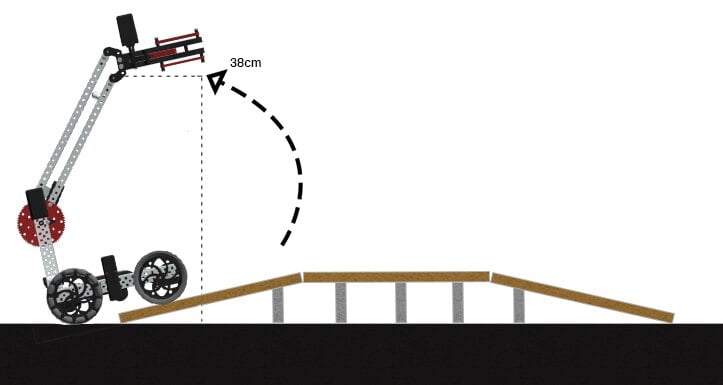
तीसरे राउंड के दौरान, V5 क्लॉबोट्स की भुजाओं को उसके प्रारंभिक स्थान से 38 सेंटीमीटर (लगभग 15 इंच) ऊपर उठाया जाना चाहिए।
यदि आपके पास सिर्फ दो टीमें हैं, तो राउंड 3 का मैचअप जीतने वाली टीम चुनौती की विजेता होगी।
![]() शिक्षक युक्तियाँ
शिक्षक युक्तियाँ
-
प्रत्येक दौड़ से पहले प्रत्येक हाथ की स्थिति की जांच करें ताकि यह सुनिश्चित हो सके कि हाथ सही स्थिति में है।
-
प्रत्येक मैचअप के विजेताओं को एक अन्य राउंड 3 मैच में तब तक आमने-सामने रहने की अनुमति दी जानी चाहिए, जब तक कि एक टीम समग्र विजेता के रूप में उभर कर सामने न आ जाए।
-
विद्यार्थियों को सूचित करें कि जब पंजे वाला हाथ ऊपर उठाया जाता है तो V5 क्लॉबोट के पलटने की संभावना रहती है (विशेषकर यदि हाथ ऊपर उठा हो और पंजा किसी वस्तु को पकड़े हुए हो)।