
റോബോട്ടിനൊപ്പം ഗുരുത്വാകർഷണ കേന്ദ്രം പര്യവേക്ഷണം ചെയ്യുന്നു
| അളവ് | ആവശ്യമായ വസ്തുക്കൾ |
|---|---|
| 2 |
VEX V5 ക്ലാസ്റൂം സ്റ്റാർട്ടർ കിറ്റുകൾ (കാലികമായ ഫേംവെയറോടുകൂടി) |
| 1 |
ടേപ്പ് റോൾ |
| 1 |
ചെറിയ റാമ്പ് നിർമ്മിക്കാനുള്ള വസ്തുക്കൾ (മരം, കാർഡ്ബോർഡ്, ബൈൻഡറുകൾ മുതലായവ) |
| 1 |
മീറ്റർ സ്റ്റിക്ക് |
| 1 |
എഞ്ചിനീയറിംഗ് നോട്ട്ബുക്ക് |
ഘട്ടം 1: ഒരു സ്ഥലം വൃത്തിയാക്കൽ
 ക്ലോ ആം ചലഞ്ച്നുള്ള 3
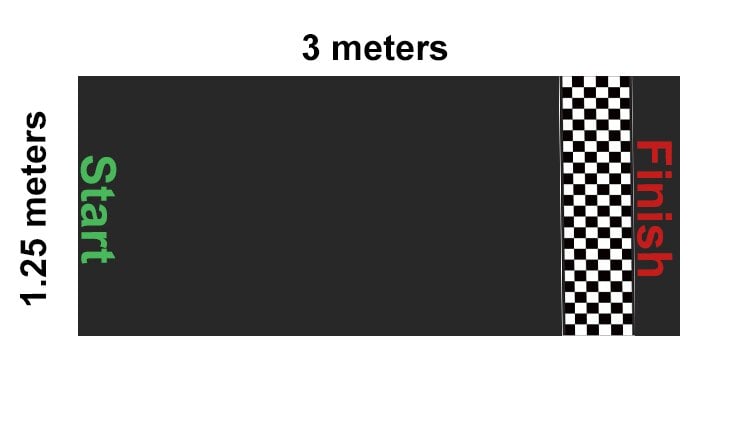
ക്ലോ ആം ചലഞ്ച്നുള്ള 3 നിങ്ങളുടെ V5 Clawbot-നായി ഒരു കോഴ്സ് സൃഷ്ടിക്കുന്നതിനുള്ള ആദ്യപടി തറയിൽ ഏകദേശം 3 മീറ്റർ (119 ഇഞ്ച്) 1.25 മീറ്റർ (49 ഇഞ്ച്) വീതിയിൽ ഒരു സ്ഥലം വൃത്തിയാക്കുക എന്നതാണ്. ഇത് റേസിംഗ് ട്രാക്കായിരിക്കും, ഒരേ സമയം രണ്ട് ക്ലോബോട്ടുകൾക്ക് അടുത്തടുത്തായി മത്സരിക്കാൻ ഇത് അനുവദിക്കും. ട്രാക്ക് സ്റ്റാർട്ടിംഗ്, ഫിനിഷിംഗ് ലൈനുകൾ കൊണ്ട് വ്യക്തമായി അടയാളപ്പെടുത്തുന്ന തരത്തിൽ ടേപ്പ് ഉപയോഗിച്ചോ അല്ലെങ്കിൽ ഏതെങ്കിലും വിധത്തിലോ സ്ഥലം അടയാളപ്പെടുത്തുക.
![]() അധ്യാപക നുറുങ്ങുകൾ
അധ്യാപക നുറുങ്ങുകൾ
-
3 മീറ്റർ (119 ഇഞ്ച്) 1.25 മീറ്റർ (49 ഇഞ്ച്) വീതിയുള്ള ഒരു സ്ഥലം കണ്ടെത്തുക. സ്ഥലപരിമിതിയുള്ള സന്ദർഭങ്ങളിൽ ട്രാക്കിന്റെയും റാമ്പിന്റെയും വീതി കുറയ്ക്കാൻ കഴിയും, എന്നാൽ ഒരേ സമയം രണ്ട് V5 ക്ലോബോട്ടുകൾക്ക് മത്സരിക്കാൻ കഴിയുന്നത്ര വീതി ട്രാക്കിന്റെ വീതിയിൽ ഉണ്ടായിരിക്കണം.
-
വിദ്യാർത്ഥികളുമായി തന്ത്രപരവും ടീം വർക്കുമായുള്ള (Google / .docx / .pdf) നുറുങ്ങുകൾ അവലോകനം ചെയ്തുകൊണ്ട് സഹകരണ പഠന കഴിവുകളുടെ ബോധപൂർവമായ വികസനം പ്രോത്സാഹിപ്പിക്കുക.
-
റാമ്പ് നിർമ്മിക്കുന്നതിനുള്ള വസ്തുക്കൾ മുൻകൂട്ടി ശേഖരിക്കുക. ഹാർഡ്വെയർ/സോഫ്റ്റ്വെയർ വിഭാഗത്തിൽ ശുപാർശ ചെയ്യുന്ന മെറ്റീരിയലുകൾ ഉണ്ട്, എന്നാൽ മൂന്ന് വളയങ്ങളുള്ള ബൈൻഡറുകൾ മുതൽ പ്ലൈവുഡ് വരെ എന്തും മതിയാകും.
ഘട്ടം 2: ഒരു റാമ്പ് നിർമ്മിക്കുന്നു
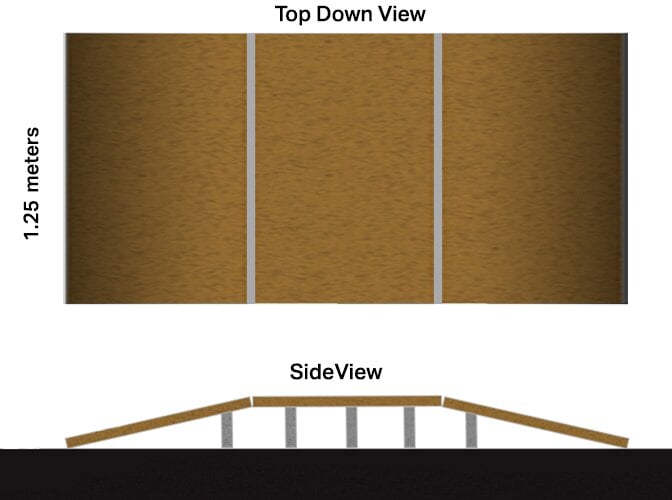
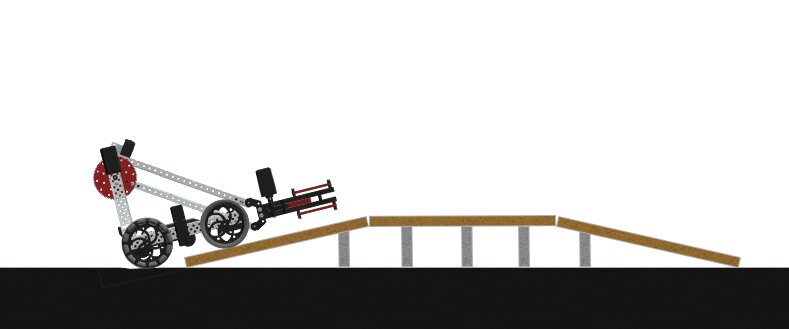
അടുത്ത ഘട്ടം കോഴ്സിന്റെ വീതിയുള്ള (ഏകദേശം 1.25 മീറ്റർ അല്ലെങ്കിൽ 49 ഇഞ്ച്) ഒരു റാമ്പ് നിർമ്മിക്കുക എന്നതാണ്. മരം, കാർഡ്ബോർഡ്, അല്ലെങ്കിൽ രണ്ട് V5 ക്ലോബോട്ടുകളുടെ ഭാരം താങ്ങാൻ തക്ക കരുത്തുള്ള മറ്റെന്തെങ്കിലും ഉപയോഗിച്ച് റാമ്പ് നിർമ്മിക്കാം. റാമ്പിന് രണ്ട് ചരിവുകൾ ഉണ്ടായിരിക്കണം, ആദ്യം മുകളിലേക്കും പിന്നീട് താഴേക്കും, കൂടാതെ രണ്ടറ്റത്തും വിടവുകൾ ഉണ്ടാകാതിരിക്കാൻ ക്രമേണ ചരിവ് മാറ്റുകയും വേണം.
ഘട്ടം 3: റാമ്പ് സ്ഥാപിക്കൽ
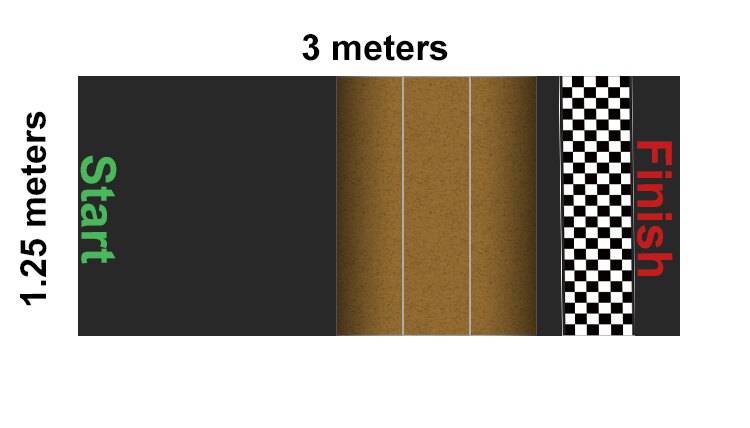
കോഴ്സിന്റെ രണ്ടാം പകുതിയിലേക്ക് റാമ്പ് നീക്കുക. റാമ്പ് ആരംഭ ലൈനിൽ നിന്ന് കുറഞ്ഞത് 1.5 മീറ്റർ (59 ഇഞ്ച്) അകലെയായിരിക്കണം. റാമ്പ് സ്ഥാപിച്ചിട്ടുണ്ടെന്ന് ഉറപ്പാക്കുക, അങ്ങനെ അതിന്റെ വശങ്ങൾ ട്രാക്കിന്റെ വശങ്ങൾക്ക് കൃത്യമായി സമാന്തരമായിരിക്കും. മറ്റൊരു വിധത്തിൽ പറഞ്ഞാൽ, V5 ക്ലോബോട്ടിന്റെ മുൻ ചക്രങ്ങൾക്ക് കൃത്യമായി ഒരേ സമയം റാമ്പിൽ എത്താൻ കഴിയുന്ന തരത്തിൽ റാമ്പ് വളഞ്ഞിട്ടില്ലെന്ന് ഉറപ്പാക്കുക.
ഘട്ടം 4: റോബോട്ട് തയ്യാറാക്കൽ

V5 റോബോട്ട് ബ്രെയിൻ ഓൺ ചെയ്യുക, അത്V5 കൺട്രോളർമായി ജോടിയാക്കുന്നുവെന്ന് ഉറപ്പാക്കുക, കൂടാതെ V5 റോബോട്ട് ബ്രെയിനിൽഡ്രൈവ് പ്രോഗ്രാംപ്രവർത്തിപ്പിക്കുക, അതുവഴി നിങ്ങൾക്ക് V5 കൺട്രോളർ ഉപയോഗിച്ച് നിങ്ങളുടെ റോബോട്ടിനെ വയർലെസ് ആയി ഓടിക്കാൻ കഴിയും.
ഘട്ടം 5: വിശ്രമിക്കുന്ന കൈകൊണ്ട് ഓടുക
V5 ക്ലോബോട്ടുകളുടെ കൈകൾ ആരംഭ സ്ഥാനത്തോ വിശ്രമ സ്ഥാനത്തോ പൂർണ്ണമായും താഴേക്ക് വച്ചിരിക്കണം.
![]() അധ്യാപക നുറുങ്ങുകൾ
അധ്യാപക നുറുങ്ങുകൾ
-
ഓരോ V5 ക്ലോബോട്ടിന്റെയും കൈ ആരംഭ സ്ഥാനത്തേക്ക് അല്ലെങ്കിൽ വിശ്രമ സ്ഥാനത്തേക്ക് താഴ്ത്തിയിട്ടുണ്ടോയെന്ന് പരിശോധിക്കുക.
-
ടീമുകളെ ജോഡികളായി തരംതിരിക്കുക. ആദ്യ റൗണ്ടിൽ, ഓരോ ജോഡിയും V5 ക്ലോബോട്ടുകളുമായി പരസ്പരം മത്സരിക്കും.
-
ടീമുകളുടെ എണ്ണം അസമമാണെങ്കിൽ ഒരു റൗണ്ട് റോബിൻ ബ്രാക്കറ്റ് ഉപയോഗിക്കുക.
-
നാലോ അതിലധികമോ ടീമുകൾ ഉണ്ടെങ്കിൽ, ഓരോ റൗണ്ടിനു ശേഷവും ജോഡികൾ തിരിക്കുക. അടുത്ത റൗണ്ടിൽ ഏറ്റവും വേഗതയേറിയ രണ്ട് ടീമുകൾ പരസ്പരം ഏറ്റുമുട്ടുന്നുണ്ടെന്ന് ഉറപ്പാക്കുക, തുടർന്ന് അടുത്ത രണ്ട് വേഗതയേറിയ ടീമുകൾ, അങ്ങനെ പലതും.
ഘട്ടം 6: ഒരു കോണുള്ള കൈ ഉപയോഗിച്ച് ഓടുക
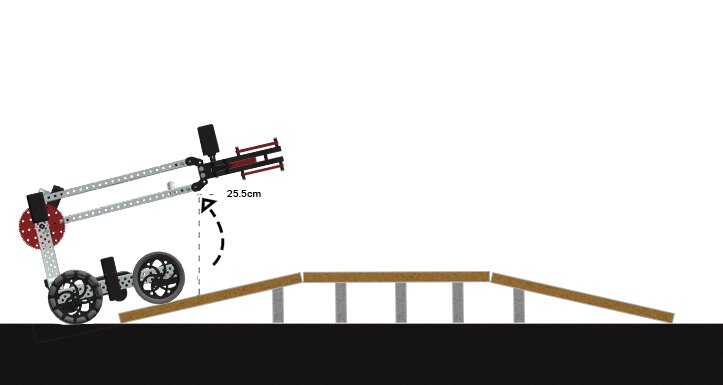
രണ്ടാം റൗണ്ടിൽ, പുതിയ ജോഡികൾ വീണ്ടും അവരുടെ ക്ലോബോട്ടുകളുമായി നേർക്കുനേർ മത്സരിക്കും.
ഈ റൗണ്ടിൽ, ഓരോ ക്ലോബോട്ടിന്റെയും കൈ അതിന്റെ ആരംഭ സ്ഥാനത്തിന് മുകളിൽ കുറഞ്ഞത് 25.5 സെന്റീമീറ്റർ (ഏകദേശം 10 ഇഞ്ച്) ഉയർത്തിയിരിക്കണം.
![]() അധ്യാപക നുറുങ്ങുകൾ
അധ്യാപക നുറുങ്ങുകൾ
-
ഓരോ ഓട്ടത്തിനും മുമ്പ് ഓരോ കൈയും ശരിയായി സ്ഥാപിച്ചിട്ടുണ്ടെന്ന് ഉറപ്പാക്കാൻ അതിന്റെ സ്ഥാനം പരിശോധിക്കുക.
-
നഖത്തിന്റെ കൈ ഉയർത്തുമ്പോൾ (പ്രത്യേകിച്ച് കൈ ഉയർത്തി നഖം ഒരു വസ്തുവിനെ പിടിക്കുകയാണെങ്കിൽ) V5 ക്ലോബോട്ട് വളയാൻ സാധ്യതയുണ്ടെന്ന് വിദ്യാർത്ഥികളെ അറിയിക്കുക.
ഘട്ടം 7: ലംബമായ ഒരു കൈ ഉപയോഗിച്ച് ഓടുക
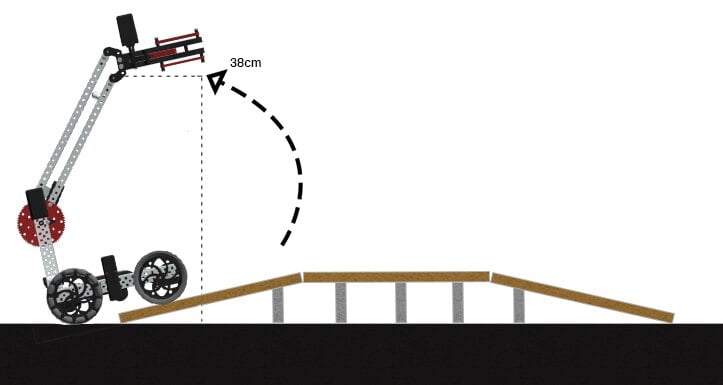
മൂന്നാം റൗണ്ടിൽ, V5 ക്ലോബോട്ട്സിന്റെ കൈകൾ ആരംഭ സ്ഥാനത്തിന് മുകളിൽ 38 സെന്റീമീറ്റർ (ഏകദേശം 15 ഇഞ്ച്) ഉയർത്തിയിരിക്കണം.
നിങ്ങൾക്ക് രണ്ട് ടീമുകൾ മാത്രമേ ഉള്ളൂവെങ്കിൽ, മൂന്നാം റൗണ്ടിലെ മത്സരം വിജയിക്കുന്ന ടീമാണ് വെല്ലുവിളിയിലെ വിജയി.
![]() അധ്യാപക നുറുങ്ങുകൾ
അധ്യാപക നുറുങ്ങുകൾ
-
ഓരോ ഓട്ടത്തിനും മുമ്പ് ഓരോ കൈയും ശരിയായി സ്ഥാപിച്ചിട്ടുണ്ടെന്ന് ഉറപ്പാക്കാൻ അതിന്റെ സ്ഥാനം പരിശോധിക്കുക.
-
ഓരോ മത്സരത്തിലെയും വിജയികളെ അടുത്ത റൗണ്ട് 3 മത്സരത്തിൽ ഏറ്റുമുട്ടാൻ അനുവദിക്കുക, ഒരു ടീം മൊത്തത്തിൽ വിജയിയാകുന്നതുവരെ.
-
നഖത്തിന്റെ കൈ ഉയർത്തുമ്പോൾ (പ്രത്യേകിച്ച് കൈ ഉയർത്തി നഖം ഒരു വസ്തുവിനെ പിടിക്കുകയാണെങ്കിൽ) V5 ക്ലോബോട്ട് വളയാൻ സാധ്യതയുണ്ടെന്ന് വിദ്യാർത്ഥികളെ അറിയിക്കുക.