
Lección 1: Bloques de sensores oculares
<Eye Sensor near object> Bloquear
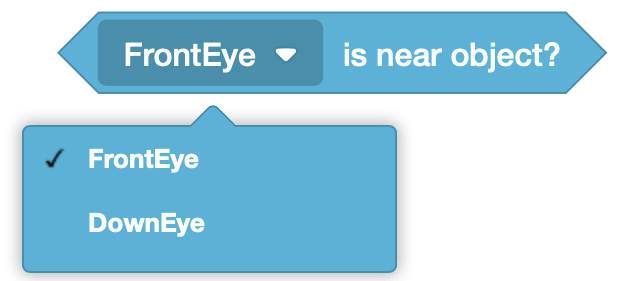
El <Eye Sensor near object> bloque informa si el sensor ocular está lo suficientemente cerca de un objeto como para detectar un color (rojo, verde, azul, ninguno).

El <Eye Sensor near object> bloque es un bloque indicador booleano que informa VERDADERO cuando el sensor ocular está cerca de un objeto que tiene colores detectables, e informa FALSO si el sensor ocular no está cerca de un objeto que tiene colores detectables.
El sensor frontal o inferior del ojo se puede seleccionar en el menú desplegable del <Eye Sensor near object> bloque.
Uso de bloques de interruptores
Este es el <Eye sensor near object> bloque Interruptor.

Puede cambiar el parámetro del sensor del sensor del ojo frontal al sensor del ojo inferior reemplazando el código "front_eye" por "down_eye". " Tenga en cuenta que el nombre del sensor debe escribirse con letras minúsculas. Simplemente escriba el parámetro o pulse la tecla Intro o la tecla Tab para seleccionar la sugerencia de parámetro que aparece.

<Color sensing> Bloquear
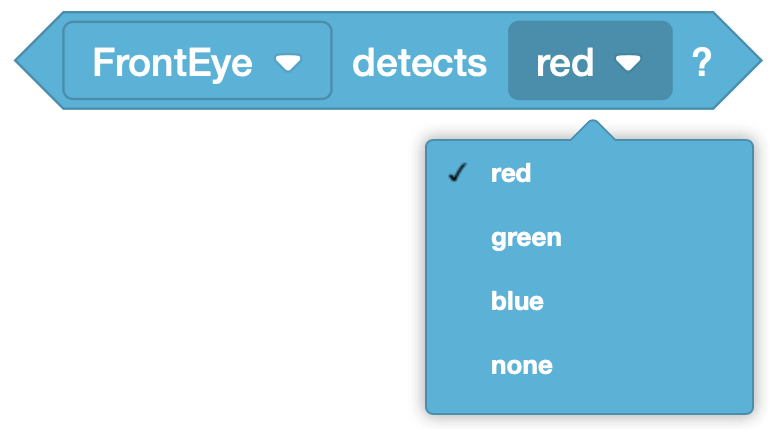
El <Color sensing> bloque informa si uno de los sensores oculares detecta un color específico.

Elija qué sensor ocular utilizar en el <Color sensing> bloque.

El <Color sensing> bloque es un bloque reportero booleano e informa VERDADERO cuando el sensor ocular detecta el color seleccionado. El <Color sensing> bloque informa FALSO cuando el sensor ocular no detecta el color seleccionado. Elige qué color detectar en el <Color sensing> bloque.
Uso de bloques de interruptores
Este es el <Color sensing> bloque Interruptor.

Puede cambiar el parámetro de color escribiendo un color diferente dentro de los paréntesis. Asegúrese de introducir el color usando todas las letras mayúsculas. Las sugerencias para el parámetro de color aparecerán a medida que modifique el texto.

Al igual que el <Eye sensor near object> bloque, puede cambiar el parámetro del sensor del sensor del ojo frontal al sensor del ojo inferior reemplazando "front_eye" por "down_eye". Asegúrese de introducir el nombre del sensor con letras minúsculas. Usar la sintaxis adecuada es importante, así que asegúrate de incluir un guión bajo (_) entre las dos palabras en el nombre del sensor.

Seleccione el botón Siguiente para continuar con el resto de esta lección.