
Exploración de laboratorio STEM de extremo abierto: diseño
![]() Teacher Toolbox
Teacher Toolbox
-
Esquema de la actividad
Esta exploración permitirá a los estudiantes aplicar los comportamientos básicos de programación que han aprendido para crear un comportamiento complejo de conducir un camino específico. Haga clic en uno de los siguientes enlaces para ver el esquema de esta actividad (Google Doc/.docx/.pdf). -
Roles de exploración de los estudiantes
Organice a los estudiantes en grupos antes de comenzar la exploración. Los estudiantes pueden organizarse en grupos de dos a cuatro estudiantes cuando participan en la exploración. Cada estudiante debe asumir 1 (o más) funciones. Los roles de las experiencias son: constructor, programador, conductor y grabador. Para obtener más información sobre roles y consejos y rúbricas de colaboración, haga clic en uno de los siguientes enlaces (Google Doc/.docx/.pdf).
El constructor de cada grupo debe obtener el hardware necesario. El registrador debe obtener el cuaderno de ingeniería del grupo. El programador debe abrir VEXcode IQ.
| Cantidad | Materiales necesarios |
|---|---|
| 1 |
Autopilot Robot |
| 1 |
Batería de robot cargada |
| 1 |
VEXcode IQ |
| 1 |
Cable USB (si utiliza un ordenador) |
| 1 |
Cuaderno de ingeniería |
| 1 |
Papel grande para mapeo |
| 1 |
Marcadores |
| 1 por grupo |
Bloquear para usar como obstáculo (opcional) |
![]() Teacher Toolbox
-
Diseño
Teacher Toolbox
-
Diseño
El objetivo de este laboratorio STEM es aplicar el accionamiento y el giro de los bloques para resolver un problema del mundo real. Para lograr este objetivo, los estudiantes deben diseñar un camino para que el robot viaje.
- Divide la clase en sus grupos: cada miembro del grupo debe elegir al menos 1 rol para cumplir con la experiencia.
- Como clase, revisen rápidamente el problema y los requisitos, pautas y unidades que han definido juntos.
- Dé a los estudiantes de 5 a 10 minutos para esbozar un camino diseñado para que el robot viaje en sus cuadernos de ingeniería.
- A medida que cada grupo completa un diseño, debe revisarlo para asegurarse de que cumpla con los requisitos necesarios y esté listo para ser transferido a papel grande.
- Transfiera el mapa a un papel grande para que el robot viaje. (Use reglas y asegúrese de hacer mediciones en el mapa que coincidan con las unidades/parámetros acordados).
- A medida que cada grupo complete el mapa a gran escala, debe revisarlo para asegurarse de que cumpla con los requisitos y esté listo para la codificación.
Antes de que los estudiantes comiencen a programar, deberán decidir y esbozar un diseño
que cumpla con los requisitos enumerados anteriormente (y cualquier requisito adicional
del maestro). Durante la fase de diseño, camine para asegurarse de que cada miembro del
grupo participe en este proceso y trabaje dentro de los roles del grupo. Tenga en cuenta
cualquier problema de resolución de problemas durante el proceso de diseño que se pueda
solucionar temprano, para que los estudiantes escriban un programa exitoso.
Por
ejemplo:
¿Qué habrá en tu proyecto?
Creará un plan, o plano, para su Robot de reciclaje y luego creará un proyecto para ejecutarlo. Si bien su robot realmente no estará dando vueltas por su escuela, crear un plan a menor escala aún requiere precisión. Para ello, cada plan y proyecto debe incluir lo siguiente:
-
Su aula es "base de operaciones", donde saldrá y regresará a
-
El robot debe entrar y salir de 3 aulas
-
El proyecto debe incluir los cuatro comandos: avance, retroceso, giro a la izquierda y giro a la derecha. (Un proyecto exitoso incluirá varios de cada uno de estos comandos).
-
Un indicador de que se ha recogido el reciclaje (es decir, El LED táctil se enciende; espere 3 segundos; etc.)
Cuando su grupo está trabajando en su plan de diseño juntos, el constructor y el grabador deben asegurarse de que la ruta que diseña cumpla con todos estos requisitos.
![]() Consejos para profesores
Consejos para profesores
-
¿Qué tan lejos es eso?-Definición de distancias juntas
Si está buscando una manera de agilizar el proceso de diseño, definir algunos parámetros con los estudiantes puede ayudar.Por ejemplo:
-
Entrar/salir de un aula = 8 pulgadas/203 mm
-
Pasillo corto = 12 pulgadas/305 mm
-
Pasillo largo = 24 pulgadas/610 mm
Esto no solo dará un ejemplo del tipo de especificidad necesaria, sino que también ayudará a avanzar más fácilmente en la fase de diseño y evitará la confusión de los estudiantes sobre las mediciones. Puedes hacer una lluvia de ideas de antemano, o junto con la clase si el tiempo lo permite. (Haga clic en uno de los siguientes enlaces para obtener un gráfico de "unidades de parámetros sugeridas" (Google Doc/.docx/.pdf).) Manténgalos visibles para que los estudiantes los consulten fácilmente mientras trabajan.
-
-
Resalte los roles en acción
Si bien todos los estudiantes del grupo deben participar en la planificación, el registrador debe tener el borrador final del diseño para el grupo. Mientras los estudiantes trabajan, es posible que desee señalar los puntos fuertes de la grabadora para hacer planes de diseño precisos y preguntar a otros miembros del equipo cómo pueden ayudar, dentro de sus roles. Por ejemplo, el constructor y el programador pueden querer etiquetar y realizar un seguimiento de las mediciones y los pasos que ha dibujado la grabadora, mientras que el conductor pensará en la direccionalidad y los ángulos de giro.
![]() Consejos del maestro
:
haga preguntas para dar su opinión
Consejos del maestro
:
haga preguntas para dar su opinión
Cuando los estudiantes se comuniquen con usted sobre sus mapas, intente enmarcar sus comentarios en forma de pregunta, en lugar de dar una solución. Preguntar cosas como, "Solo tienes dos paradas, ¿dónde puedes agregar una tercera?" o "¿Cómo va tu robot alrededor del obstáculo?" o "¿En qué dirección viaja el robot aquí?" permite a los estudiantes practicar habilidades de pensamiento crítico y mantener la agencia sobre la resolución de problemas.
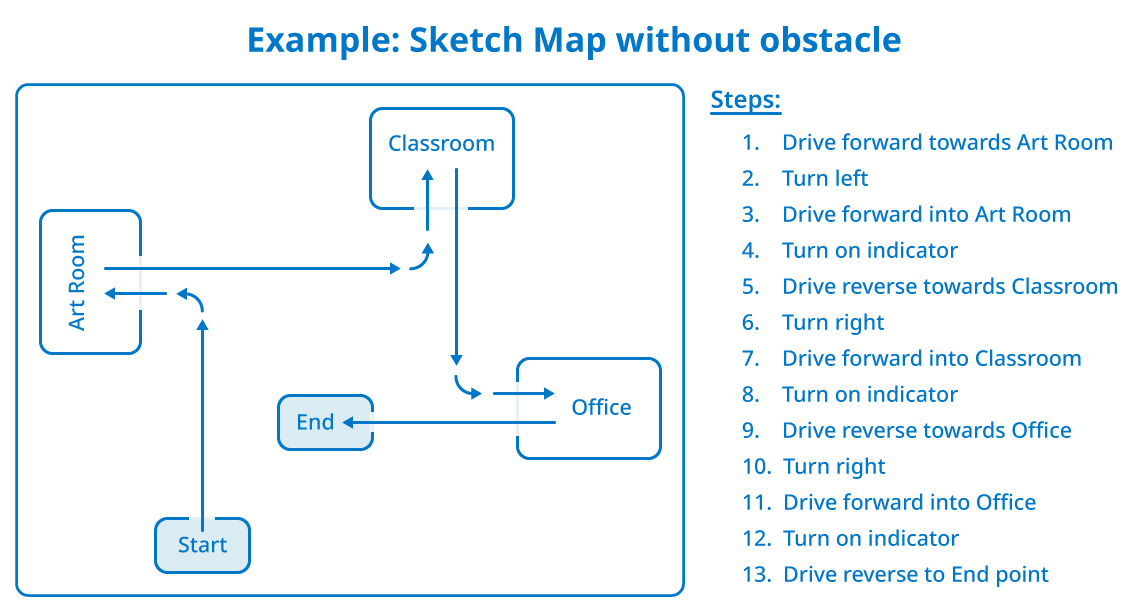
Paso 1: trazar un pensamiento espacial de solución en acción
Ahora que conoces los requisitos y parámetros, dibuja un mapa en tu cuaderno de ingeniería para mostrar las tres paradas que hará tu robot para recoger el reciclaje en la escuela.
- Asegúrese de marcar los puntos de inicio y finalización, y etiquete las aulas o lugares que son importantes.
- Use flechas para mostrar la dirección y el orden en que viajará el robot.
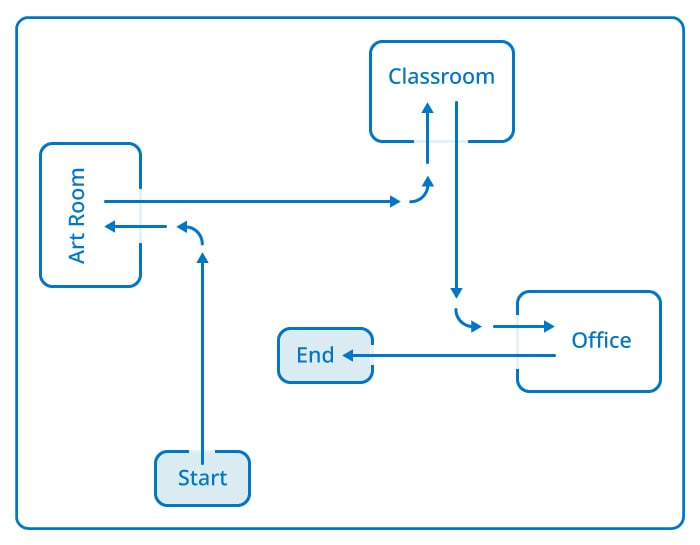
- Utilice el boceto de ejemplo como guía. Recuerda que este es un plan, por lo que no es necesario que sea exacto, pero es posible que desees añadir notas o recordatorios para ayudarte cuando comiences a codificar.
- Consulte con su maestro cuando tenga un mapa completo en su cuaderno. El registrador debe tener la versión final para compartir con el maestro y para basar su mapa grande.
- Cuando tu profesor apruebe tu mapa dibujado, usa el papel grande, los marcadores y las reglas para transferir ese mapa a una escala más grande en la que el robot pueda conducir. Recuerde medir las distancias que dibuja para que coincidan con los parámetros y unidades discutidos. De esa manera, tu código coincidirá con tu mapa, para ayudar a tu robot a conducir con éxito.
![]() Motiva la discusión
:
articula tu pensamiento
Motiva la discusión
:
articula tu pensamiento
P: Piensa en el plan que hiciste, ¿por qué elegiste mudarte a lugares en ese orden? ¿Qué factores tuvo en cuenta al tomar sus decisiones sobre a dónde ir? (Los estudiantes pueden responder esto por escrito en su cuaderno de ingeniería, o simplemente en una discusión verbal, si el tiempo lo permite).
R: Las respuestas variarán, pero pueden incluir cosas como quién tendría más o menos que recuperar, cómo evitar el obstáculo por completo, qué haría el código más corto, etc.
P: ¿Por qué crees que tener una escala consistente es importante para mover tu plan de tu cuaderno a un papel más grande?
R: La escala es importante para tomar un plan pequeño y transferirlo a un espacio más grande. Una escala consistente mantendrá todos los espacios colocados por igual entre sí.