
![]() 教師用ツールボックス
教師用ツールボックス
-
アクティビティの概要
この探索により、学生は学んだ基本的なプログラミング動作を応用して、指定されたパスを駆動する複雑な動作を作成できるようになります。 このアクティビティの概要については、次のリンク のいずれかをクリックしてください (Google ドキュメント/.docx/.pdf)。 -
生徒の探索の役割
探索を開始する前に、生徒をグループに編成します。 探索に参加する場合、学生は 2 ~ 4 人のグループに編成されます。 各生徒は 1 つ (または複数) の役割を担う必要があります。 エクスペリエンスの役割は、ビルダー、プログラマー、ドライバー、およびレコーダーです。 役割、コラボレーションのヒント、ルーブリックの詳細については、 次のリンクのいずれか (Google Doc/.docx/.pdf) をクリックしてください。
各グループのビルダーは、必要なハードウェアを入手する必要があります。 記録者はグループのエンジニアリング ノートを取得する必要があります。 プログラマーは VEXcode IQ を開く必要があります。
| 量 | 必要な材料 |
|---|---|
| 1 |
自動操縦ロボット |
| 1 |
充電済みのロボットバッテリー |
| 1 |
VEXコードIQ |
| 1 |
USB ケーブル (コンピューターを使用する場合) |
| 1 |
エンジニアリングノート |
| 1 |
地図作成用の大型紙 |
| 1 |
マーカー |
| グループごとに 1 つ |
障害物として使用するブロック(オプション) |
![]() 教師用ツールボックス
-
のデザイン
教師用ツールボックス
-
のデザイン
この STEM ラボの目標は、 ドライブを と ターンを ブロックに適用して、現実の問題を解決することです。 この目標を達成するには、学生はロボットが移動する経路を設計する必要があります。
-
クラスをグループに分けます。グループの各メンバーは、この経験のために果たすべき役割を少なくとも 1 つ選択する必要があります。
-
クラス全体で、問題と、一緒に定義した要件、ガイドライン、単位をすばやく確認します。
-
学生に 5 ~ 10 分かけて、ロボットが移動するための設計された経路をエンジニアリング ノートに描きます。
-
各グループがデザインを完成させたら、そのデザインが必要な要件を満たしていること、および大きな紙に転送する準備ができていることを確認する必要があります。
-
ロボットが走行できるように地図を大きな紙に転写します。 (定規を使用し、合意された単位/パラメータと一致する地図上の測定を必ず行ってください。)
-
各グループが大規模なマップを完成させたら、それが要件を満たしていること、およびコーディングの準備ができていることを確認する必要があります。
生徒がプログラミングを開始する前に、上記の要件 (および教師の追加要件) を満たすデザインを決定し、スケッチする必要があります。 設計段階では、グループの各メンバーがこのプロセスに参加し、グループ内の役割の範囲内で作業していることを確認するために歩き回ります。 学生が適切なプログラムを作成できるように、設計プロセス中に早期に修正できるトラブルシューティングの問題に注意してください。
例えば:
あなたのプロジェクトには何が含まれますか?
リサイクル ロボットの計画または青写真を作成し、それを実行するプロジェクトを作成します。 ロボットが学校内を実際に移動するわけではありませんが、小規模な計画を作成するには依然として正確さが必要です。 これを行うには、各計画とプロジェクトに次の内容を含める必要があります。
-
あなたの教室は、そこから出発し、また戻ってくる「ホームベース」です。
-
ロボットは 3 つの教室に出入りする必要があります
-
プロジェクトには、前進、後進、左折、右折の 4 つのコマンドを含める必要があります。 (成功したプロジェクトには、これらの各コマンドがいくつか含まれています。)
-
リサイクルが進んでいることを示す指標 (すなわち、 タッチLEDが点灯します。 3秒待ちます。等。)
グループが一緒に設計計画に取り組んでいる場合、ビルダーとレコーダーは、設計したパスがこれらの要件をすべて満たしていることを確認する必要があります。
![]() 教師へのヒント
教師へのヒント
-
どのくらいの距離ですか?—一緒に距離を定義する
設計プロセスを合理化する方法を探している場合は、学生と一緒にいくつかのパラメータを定義すると役立ちます。例えば:
-
教室への出入り = 8 インチ/203 mm
-
短い廊下 = 12 インチ/305 mm
-
長い廊下 = 24 インチ/610 mm
これは、必要な具体性の例を示すだけでなく、設計段階をより容易に進め、測定に関する学生の混乱を避けるのにも役立ちます。 事前にブレインストーミングを行うことも、時間が許せばクラスの参加者と一緒にブレインストーミングを行うこともできます。 (「推奨されるパラメーター単位」の表を表示するには、次のリンクのいずれかをクリックしてください (Google Doc/.docx/.pdf)。) 生徒が作業中に簡単に参照できるように、これらを見えるようにしておきます。
-
-
活動中の役割を強調する
グループ内のすべての生徒が計画に参加する必要がありますが、記録者はグループの設計の最終草案を持っている必要があります。 学生が作業しているときに、正確な設計計画を作成する際のレコーダーの長所を指摘し、チームの他のメンバーに自分の役割の範囲内でどのように支援できるかを尋ねるとよいでしょう。 たとえば、ビルダーとプログラマーは、レコーダーが描いた測定値とステップにラベルを付けて追跡したい場合がありますが、ドライバーは方向性と回転角度について考えます。
![]() 教師へのヒント
-
質問してフィードバックを与える
教師へのヒント
-
質問してフィードバックを与える
学生がマップについてあなたに連絡するときは、解決策を与えるのではなく、質問の形でフィードバックを組み立てるようにしてください。 「停留所は 2 つしかありませんが、3 つ目の停留所を追加できる場所はどこですか?」などと尋ねます。または「あなたのロボットは障害物をどうやって回避していますか?」または「ロボットはここをどの方向に移動していますか?」生徒が批判的思考スキルを練習し、問題解決に対する主体性を維持できるようにします。
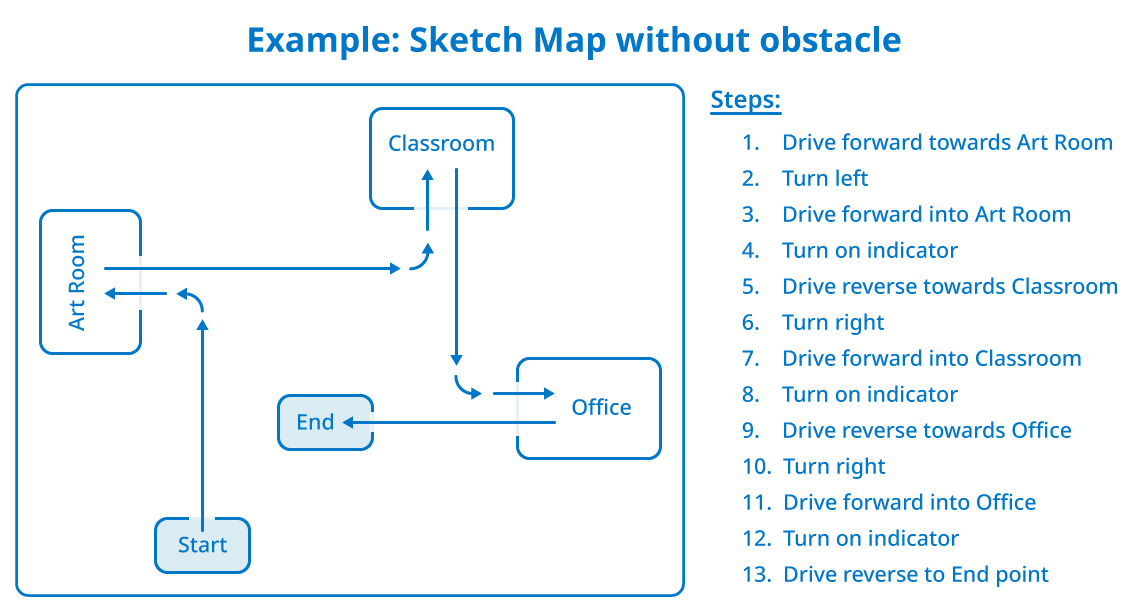
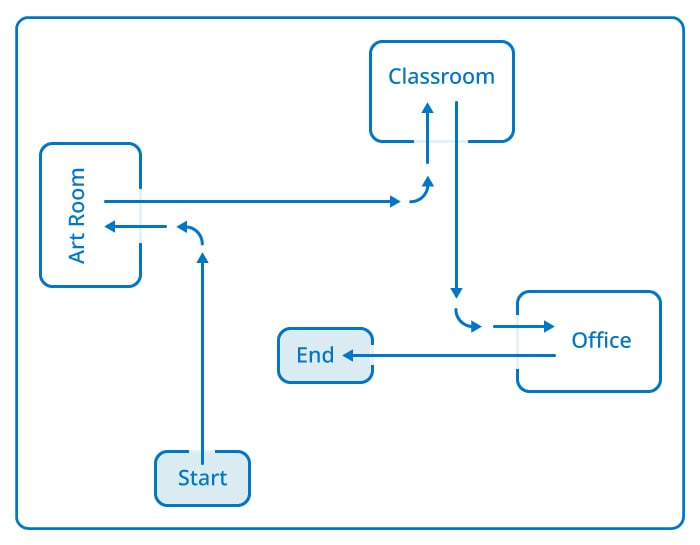
ステップ 1: 解決策を計画する — 空間的思考を実践する
要件とパラメータがわかったので、エンジニアリング ノートに地図を描き、学校内でリサイクル品を回収するためにロボットが立ち寄る 3 つの停止場所を示します。
-
開始点と終了点を必ずマークし、重要な教室や場所にラベルを付けてください。
-
矢印を使用して、ロボットが移動する方向と順序を示します。
-
スケッチ例をガイドとして使用してください。 これは計画であるため、正確である必要はありませんが、コーディングを開始するときに役立つメモやリマインダーを追加するとよいでしょう。
-
ノートに完成した地図ができたら、先生に相談してください。 Recorder には、教師と共有し、大きなマップの基礎となる最終バージョンが必要です。
-
教師がスケッチした地図を承認したら、大きな紙、マーカー、定規を使用して、その地図をロボットが走行できるより大きな縮尺に転写します。 説明したパラメータと単位に一致するように、描画した距離を必ず測定してください。 そうすることで、コードがマップと一致し、ロボットが正常に運転できるようになります。
![]() ディスカッションの動機付け
-
自分の考えを明確にする
ディスカッションの動機付け
-
自分の考えを明確にする
Q: あなたが立てた計画を考えて、なぜその順序で場所を移動することにしたのですか? どこに行くかを決める際にどのような要素を考慮しましたか? (学生は、エンジニアリング ノートに書面でこれに答えることも、時間があれば口頭で議論することもできます。)
A: 答えはさまざまですが、誰が取得するものが最も多いか最も少ないか、障害物を完全に回避する方法、最短のコードを作成する方法などが含まれる場合があります。
Q: 計画をノートからより大きな紙に移行するには、一貫したスケールを持つことがなぜ重要だと思いますか?
A: 小さな計画をより大きな空間に移すには、スケールが重要です。 一貫したスケールにより、すべてのスペースが相互に均等に配置されます。