
Esplorazione Open Ended STEM Lab: Design
![]() Cassetta degli attrezzi per insegnanti
Cassetta degli attrezzi per insegnanti
-
Struttura dell'attività
Questa esplorazione consentirà agli studenti di applicare i comportamenti di programmazione di base che hanno imparato per creare un comportamento complesso di guida di un percorso specificato. Fai clic su uno dei seguenti link per lo schema di questa attività (Google Doc/.docx/.pdf). -
Ruoli di esplorazione degli studenti
Organizzare gli studenti in gruppi prima di iniziare l'esplorazione. Gli studenti possono essere organizzati in gruppi da due a quattro studenti quando partecipano all'esplorazione. Ogni studente dovrebbe assumere 1 (o più) ruoli. I ruoli per le esperienze sono: Builder, Programmer, Driver e Recorder. Per ulteriori informazioni su ruoli, suggerimenti di collaborazione e rubriche, fai clic su uno dei seguenti link (Google Doc/.docx/.pdf).
Il Costruttore in ogni gruppo dovrebbe ottenere l'hardware richiesto. Il Registratore dovrebbe ottenere il taccuino tecnico del gruppo. Il programmatore deve aprire VEXcode IQ.
| Quantità | Materiali necessari |
|---|---|
| 1 |
Robot pilota automatico |
| 1 |
Batteria del robot carica |
| 1 |
VEXcode IQ |
| 1 |
Cavo USB (se si utilizza un computer) |
| 1 |
Taccuino tecnico |
| 1 |
Carta grande per la mappatura |
| 1 |
Pennarelli |
| 1 per gruppo |
Blocco da utilizzare come ostacolo (opzionale) |
![]() Teacher Toolbox
-
Design
Teacher Toolbox
-
Design
L'obiettivo di questo laboratorio STEM è applicare l' azionamento e la rotazione per i blocchi per risolvere un problema del mondo reale. Per raggiungere questo obiettivo, gli studenti devono progettare un percorso che permetta al robot di viaggiare.
- Dividi la classe nei loro gruppi: ogni membro del gruppo dovrebbe scegliere almeno 1 ruolo da svolgere per l'esperienza.
- Come classe, rivedi rapidamente il problema e i requisiti, le linee guida e le unità che hai definito insieme.
- Dai agli studenti 5–10 minuti per delineare un percorso progettato per consentire al robot di viaggiare nei loro quaderni di ingegneria.
- Man mano che ogni gruppo completa un progetto, è necessario controllarlo per assicurarsi che soddisfi i requisiti necessari ed è pronto per essere trasferito su carta di grandi dimensioni.
- Trasferisci la mappa su carta grande su cui il robot può viaggiare. (Usa i righelli e assicurati di effettuare misurazioni sulla mappa che corrispondano alle unità/parametri concordati.)
- Man mano che ogni gruppo completa la mappa su larga scala, dovresti controllarla per assicurarti che soddisfi i requisiti ed è pronta per la codifica.
Prima che gli studenti inizino la programmazione, dovranno decidere e abbozzare un
progetto che soddisfi i requisiti sopra elencati (ed eventuali requisiti aggiuntivi
dell'insegnante). Durante la fase di progettazione, fai un giro per assicurarti che ogni
membro del gruppo sia coinvolto in questo processo e lavori all'interno dei ruoli del
gruppo. Annotare eventuali problemi di risoluzione dei problemi durante il processo di
progettazione che possono essere risolti in anticipo, in modo che gli studenti possano
scrivere un programma di successo.
Ad esempio:
Cosa ci sarà nel tuo progetto?
Creerai un piano, o progetto, per il tuo robot riciclatore e quindi creerai un progetto per eseguirlo. Mentre il tuo robot non girerà davvero per la tua scuola, la creazione di un piano su scala ridotta richiede ancora precisione. A tal fine, ogni piano e progetto dovrebbe includere quanto segue:
-
La tua classe è "base di partenza", dove lascerà e tornerà a
-
Il robot deve entrare e uscire da 3 aule
-
Il progetto deve includere i quattro comandi: guidare in avanti, guidare in retromarcia, girare a sinistra e girare a destra. (Un progetto di successo includerà diversi di questi comandi.)
-
Un indicatore che il riciclaggio è stato raccolto (cioè Il LED touch si accende; attendere 3 secondi; ecc.)
Quando il tuo gruppo sta lavorando insieme al tuo piano di progettazione, il Costruttore e il Registratore dovrebbero assicurarsi che tutti questi requisiti siano soddisfatti dal percorso che progetti.
![]() Suggerimenti per l'insegnante
Suggerimenti per l'insegnante
-
Quanto è distante?—Defining Distances Together
Se stai cercando un modo per semplificare il processo di progettazione, definire alcuni parametri con gli studenti può aiutarti.Ad esempio:
-
Entrare/uscire da un'aula = 8 pollici/203 mm
-
Corridoio corto = 12 pollici/305 mm
-
Corridoio lungo = 24 pollici/610 mm
Ciò non solo fornirà un esempio del tipo di specificità necessaria, ma contribuirà anche a far avanzare più facilmente la fase di progettazione ed evitare la confusione degli studenti sulle misurazioni. Puoi fare brainstorming in anticipo o insieme alla classe se il tempo lo consente. (Fare clic su uno dei seguenti collegamenti per un grafico delle "unità di parametri suggerite" (Google Doc/.docx/.pdf).) Tienili visibili per un facile riferimento per gli studenti mentre lavorano.
-
-
Evidenzia i ruoli in azione
Mentre ogni studente del gruppo dovrebbe prendere parte alla pianificazione, il Registratore dovrebbe avere la bozza finale del progetto per il gruppo. Mentre gli studenti stanno lavorando, potresti voler sottolineare i punti di forza del registratore nel fare piani di progettazione accurati e chiedere ad altri membri del team come possono aiutare, all'interno dei loro ruoli. Ad esempio, il Costruttore e il Programmatore potrebbero voler etichettare e tenere traccia delle misurazioni e dei passi che il Registratore ha disegnato, mentre il Conducente penserà alla direzionalità e agli angoli di svolta.
![]() Suggerimenti per l'insegnante
-
Fai domande per dare un feedback
Suggerimenti per l'insegnante
-
Fai domande per dare un feedback
Quando gli studenti ti chiedono informazioni sulle loro mappe, prova a inquadrare il tuo feedback sotto forma di una domanda, invece di dare una soluzione. Chiedere cose come "Hai solo due fermate, dove puoi aggiungerne una terza?" o "Come sta il tuo robot aggirando l'ostacolo?" o "In che direzione sta viaggiando il robot qui?" consente agli studenti di praticare capacità di pensiero critico e di mantenere l'agenzia sulla risoluzione dei problemi.
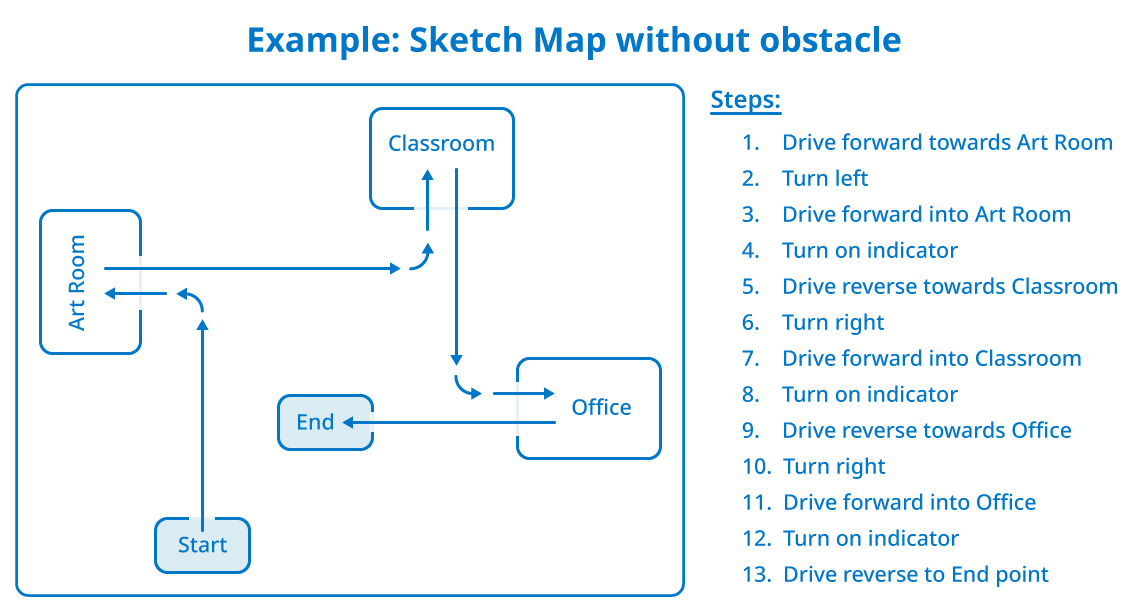
Passaggio 1: tracciare una soluzione: il pensiero spaziale in azione
Ora che conosci i requisiti e i parametri, traccia una mappa nel tuo quaderno di ingegneria per mostrare le tre fermate che il tuo robot effettuerà per raccogliere il riciclaggio nella scuola.
- Assicurati di contrassegnare i punti di inizio e di fine e di etichettare le aule o i luoghi importanti.
- Utilizzare le frecce per mostrare la direzione e l'ordine in cui il robot viaggerà.
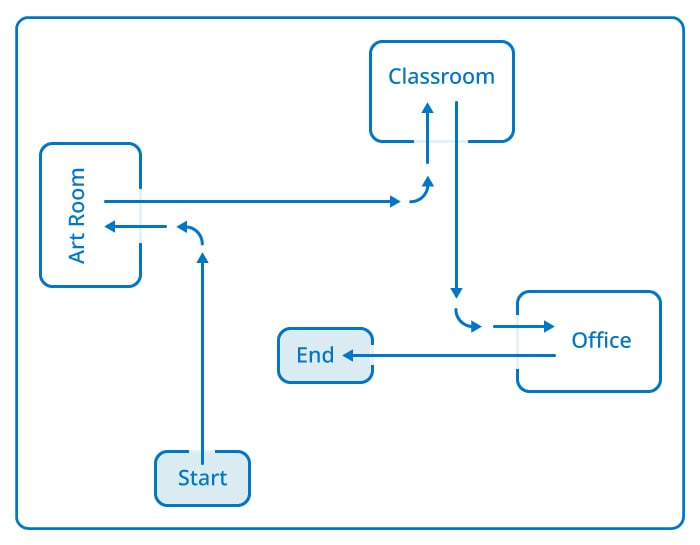
- Usa lo schizzo di esempio come guida. Ricorda, questo è un piano, quindi non è necessario che sia esatto, ma potresti voler aggiungere note o promemoria per te stesso per aiutarti quando inizi a programmare.
- Verifica con il tuo insegnante quando hai una mappa completa nel tuo taccuino. Il Registratore dovrebbe avere la versione finale da condividere con l'insegnante e su cui basare la tua mappa di grandi dimensioni.
- Quando il tuo insegnante approva la tua mappa abbozzata, usa la carta grande, i pennarelli e i righelli per trasferire quella mappa su una scala più grande su cui il robot può guidare. Ricordati di misurare le distanze che tracci per abbinare i parametri e le unità discusse. In questo modo, il tuo codice corrisponderà alla tua mappa, per aiutare il tuo robot a guidare con successo.
![]() Motiva la discussione
-
Articola il tuo pensiero
Motiva la discussione
-
Articola il tuo pensiero
D: Pensa al piano che hai fatto, perché hai scelto di spostarti in luoghi in questo ordine? Quali fattori hai preso in considerazione quando hai fatto le tue scelte su dove andare? (Gli studenti possono rispondere per iscritto nel loro quaderno di ingegneria, o semplicemente in una discussione verbale, se il tempo lo consente.)
R: Le risposte variano, ma possono includere cose come chi avrebbe più o meno da recuperare, come evitare completamente l'ostacolo, cosa renderebbe il codice più breve, ecc.
D: Perché pensi che avere una scala coerente sia importante per spostare il tuo piano dal tuo taccuino a un foglio più grande?
R: La scala è importante per prendere un piccolo piano e trasferirlo in uno spazio più grande. Una scala coerente manterrà tutti gli spazi equamente posizionati l'uno rispetto all'altro.