
![]() Zestaw narzędzi nauczyciela
Zestaw narzędzi nauczyciela
-
Zarys ćwiczenia
Ta eksploracja umożliwi uczniom zastosowanie podstawowych zachowań programistycznych, których się nauczyli, do stworzenia złożonego zachowania polegającego na podążaniu określoną ścieżką. Kliknij jeden z poniższych linków , aby zapoznać się z zarysem tego działania (Google Doc/.docx/.pdf). -
Role uczniów w eksploracji
Przed rozpoczęciem eksploracji podziel uczniów na grupy. Podczas eksploracji uczniowie mogą zostać podzieleni na grupy liczące od dwóch do czterech uczniów. Każdy uczeń powinien przyjąć 1 (lub więcej) ról. Role w środowiskach to: Konstruktor, Programista, Kierowca i Rejestrator. Aby uzyskać więcej informacji na temat ról oraz wskazówek i rubryk dotyczących współpracy, kliknij z poniższych linków (Dokument Google/.docx/.pdf).
Konstruktor w każdej grupie powinien zaopatrzyć się w wymagany sprzęt. Rejestrator powinien otrzymać notatnik inżynieryjny grupy. Programista powinien otworzyć VEXcode IQ.
| Ilość | Potrzebne materiały |
|---|---|
| 1 |
Robota autopilota |
| 1 |
Naładowany akumulator robota |
| 1 |
Kod VEX IQ |
| 1 |
Kabel USB (w przypadku korzystania z komputera) |
| 1 |
Notatnik inżynieryjny |
| 1 |
Duży papier do mapowania |
| 1 |
Markery |
| 1 na grupę |
Blok do wykorzystania jako przeszkoda (opcjonalnie) |
![]() Przybornik nauczyciela
-
Projekt
Przybornik nauczyciela
-
Projekt
Celem tego laboratorium STEM jest zastosowanie napędu dla i obrotu dla bloków w celu rozwiązania rzeczywistego problemu. Aby osiągnąć ten cel, uczniowie muszą zaprojektować ścieżkę, po której porusza się robot.
-
Podziel klasę na grupy — każdy członek grupy powinien wybrać co najmniej 1 rolę, którą będzie pełnił w ramach tego doświadczenia.
-
Jako klasa szybko przejrzyjcie problem oraz wspólnie zdefiniowane wymagania, wytyczne i jednostki.
-
Daj uczniom 5–10 minut na naszkicowanie w swoich notatnikach inżynierskich zaprojektowanej ścieżki poruszania się robota.
-
Po ukończeniu projektu przez każdą grupę należy go sprawdzić, aby upewnić się, że spełnia niezbędne wymagania i jest gotowy do przeniesienia na duży papier.
-
Przenieś mapę na duży papier, aby robot mógł po niej podróżować. (Użyj linijek i pamiętaj, aby dokonać pomiarów na mapie, które odpowiadają ustalonym jednostkom/parametrom.)
-
Gdy każda grupa ukończy mapę w dużej skali, należy ją sprawdzić, aby upewnić się, że spełnia ona wymagania i jest gotowa do kodowania.
Zanim uczniowie zaczną programować, będą musieli wybrać i naszkicować projekt spełniający wymagania wymienione powyżej (oraz wszelkie dodatkowe wymagania nauczyciela). Podczas fazy projektowania rozejrzyj się, aby upewnić się, że każdy członek grupy jest zaangażowany w ten proces i pracuje w ramach ról w grupie. Zwróć uwagę na wszelkie problemy związane z rozwiązywaniem problemów podczas procesu projektowania, które można rozwiązać wcześniej, aby uczniowie mogli napisać udany program.
Na przykład:
Co będzie w Twoim projekcie?
Będziesz tworzyć plan lub projekt swojego robota Recycle, a następnie utworzysz projekt, aby go wykonać. Chociaż robot tak naprawdę nie będzie krążył po Twojej szkole, utworzenie planu na mniejszą skalę nadal wymaga precyzji. Aby to osiągnąć, każdy plan i przedsięwzięcie powinno obejmować:
-
Twoja klasa to „baza domowa”, z której uczniowie będą wychodzić i do której wracają
-
Robot musi wejść i wyjść z 3 sal lekcyjnych
-
Projekt musi zawierać cztery polecenia: jedź do przodu, jedź do tyłu, skręć w lewo i skręć w prawo. (Udany projekt będzie zawierał kilka z każdego z tych poleceń.)
-
Wskaźnik, że podjęto recykling (tj Dotykowa dioda LED włącza się; poczekaj 3 sekundy; itp.)
Kiedy Twoja grupa wspólnie pracuje nad planem projektu, Konstruktor i Rejestrator powinni upewnić się, że projektowana ścieżka spełnia wszystkie te wymagania.
![]() Wskazówki dla nauczycieli
Wskazówki dla nauczycieli
-
Jak daleko to jest? — Wspólne definiowanie odległości
Jeśli szukasz sposobu na usprawnienie procesu projektowania, pomocne może być zdefiniowanie niektórych parametrów wspólnie z uczniami.Na przykład:
-
Wejście/wyjście z klasy = 8 cali/203 mm
-
Krótki korytarz = 12 cali/305 mm
-
Długi korytarz = 24 cale/610 mm
Da to nie tylko przykład wymaganej szczegółowości, ale także pomoże przyspieszyć fazę projektowania i uniknąć nieporozumień uczniów co do pomiarów. Możesz przeprowadzić burzę mózgów wcześniej lub wspólnie z klasą, jeśli czas na to pozwala. (Kliknij jeden z poniższych linków, aby wyświetlić wykres „sugerowanych jednostek parametrów” (Google Doc/.docx/.pdf).) Trzymaj je w widocznym miejscu, aby uczniowie mogli z nich łatwo skorzystać podczas pracy.
-
-
Wyróżnij role w działaniu
Chociaż każdy uczeń w grupie powinien brać udział w planowaniu, Protokolant powinien mieć ostateczną wersję projektu dla grupy. Podczas pracy uczniów możesz wskazać mocne strony rejestratora w tworzeniu dokładnych planów projektowych i zapytać innych członków zespołu, w jaki sposób mogą pomóc w ramach swoich ról. Na przykład Konstruktor i Programista mogą chcieć oznaczyć i śledzić pomiary i kroki narysowane przez Rejestratora, podczas gdy Kierowca będzie myślał o kierunkowości i kątach skrętu.
![]() Wskazówki dla nauczycieli
-
Zadawaj pytania, aby wyrazić opinię
Wskazówki dla nauczycieli
-
Zadawaj pytania, aby wyrazić opinię
Kiedy uczniowie kontaktują się z Tobą w sprawie swoich map, spróbuj sformułować swoją opinię w formie pytania, zamiast podawać rozwiązanie. Zadawanie pytań typu: „Masz tylko dwa przystanki, gdzie możesz dodać trzeci?” lub „Jak Twój robot omija przeszkodę?” lub „W jakim kierunku porusza się tutaj robot?” umożliwienie uczniom ćwiczenia umiejętności krytycznego myślenia i zachowania sprawczości w rozwiązywaniu problemów.
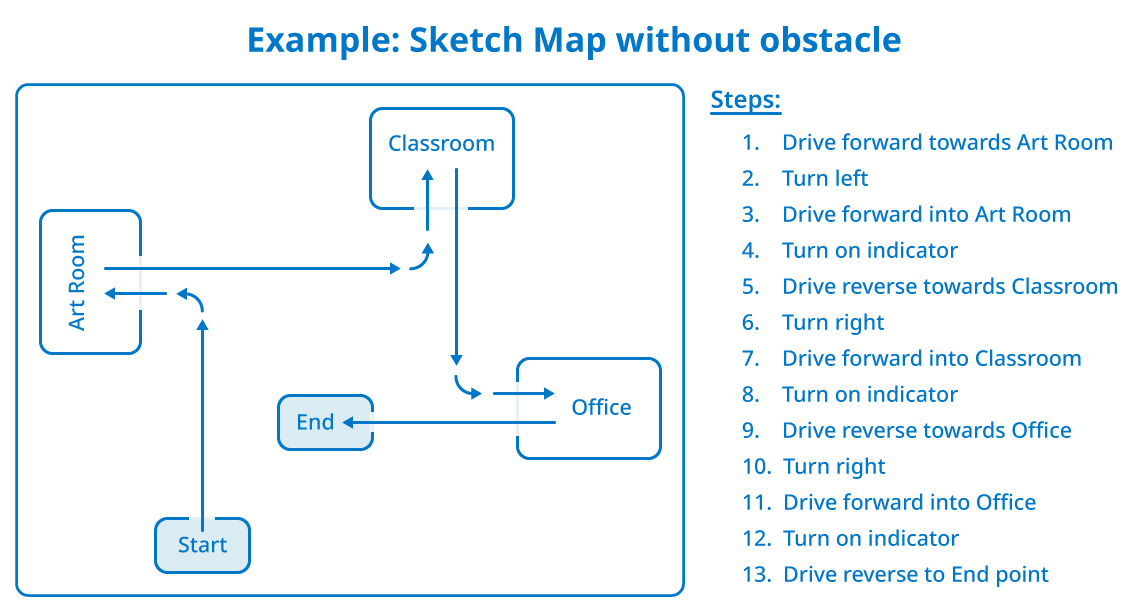
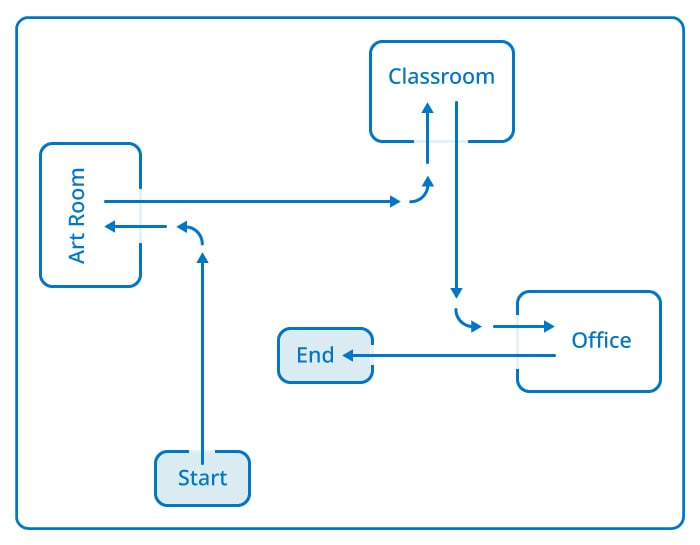
Krok 1: Zaplanuj rozwiązanie — myślenie przestrzenne w działaniu
Teraz, gdy znasz wymagania i parametry, naszkicuj w swoim notatniku inżynierskim mapę, aby pokazać trzy przystanki, które Twój robot zrobi, aby odebrać recykling w szkole.
-
Pamiętaj, aby oznaczyć punkty początkowe i końcowe oraz oznaczyć sale lekcyjne lub miejsca, które są ważne.
-
Użyj strzałek, aby wskazać kierunek i kolejność, w jakiej robot będzie się poruszał.
-
Użyj przykładowego szkicu jako wskazówki. Pamiętaj, że to jest plan, więc nie musi być dokładny, ale możesz dodać notatki lub przypomnienia, aby pomóc sobie, gdy zaczniesz kodować.
-
Skontaktuj się ze swoim nauczycielem, gdy będziesz mieć wypełnioną mapę w swoim zeszycie. Rejestrator powinien mieć ostateczną wersję, którą może udostępnić nauczycielowi i na której będzie bazować Twoja duża mapa.
-
Kiedy nauczyciel zatwierdzi naszkicowaną mapę, użyj dużego papieru, markerów i linijek, aby przenieść tę mapę do większej skali, po której robot będzie mógł jeździć. Pamiętaj, aby mierzyć rysowane odległości, aby dopasować je do omawianych parametrów i jednostek. W ten sposób Twój kod będzie pasował do Twojej mapy, co pomoże Twojemu robotowi skutecznie jeździć.
![]() Motywuj do dyskusji
-
Wyraź swój sposób myślenia
Motywuj do dyskusji
-
Wyraź swój sposób myślenia
P: Pomyśl o planie, który zrobiłeś, dlaczego zdecydowałeś się przenieść do miejsc w tej kolejności? Jakie czynniki brałeś pod uwagę, podejmując decyzję o tym, dokąd się udać? (Uczniowie mogą odpowiedzieć na to pytanie w formie pisemnej w swoim zeszycie inżynierskim lub po prostu w rozmowie ustnej, jeśli czas na to pozwala).
A: Odpowiedzi będą się różnić, ale mogą obejmować takie kwestie, jak to, kto będzie miał najwięcej lub najmniej do odzyskania, jak całkowicie ominąć przeszkodę, jaki będzie najkrótszy kod itp.
P: Jak myślisz, dlaczego posiadanie spójnej skali jest ważne przy przenoszeniu planu z notatnika na większy papier?
A: Skala jest ważna, aby móc wziąć mały plan i przenieść go na większą przestrzeń. Spójna skala sprawi, że wszystkie przestrzenie będą równomiernie rozmieszczone względem siebie.