
Leçon 2 : Effecteurs terminaux
Dans la leçon précédente, vous avez découvert le Teach Pendant dans VEXcode EXP et comment utiliser le Teach Pendant pour déplacer le bras à 6 axes.
Dans cette leçon, vous découvrirez les effecteurs finaux, y compris l'outil de ramassage d'aimant, et comment utiliser le pendentif d'enseignement pour engager et libérer l'aimant.
À la fin de cette leçon, vous utiliserez ces compétences dans l'activité pour déplacer un disque sur la tuile CTE vers un nouvel emplacement.
Effecteurs terminaux
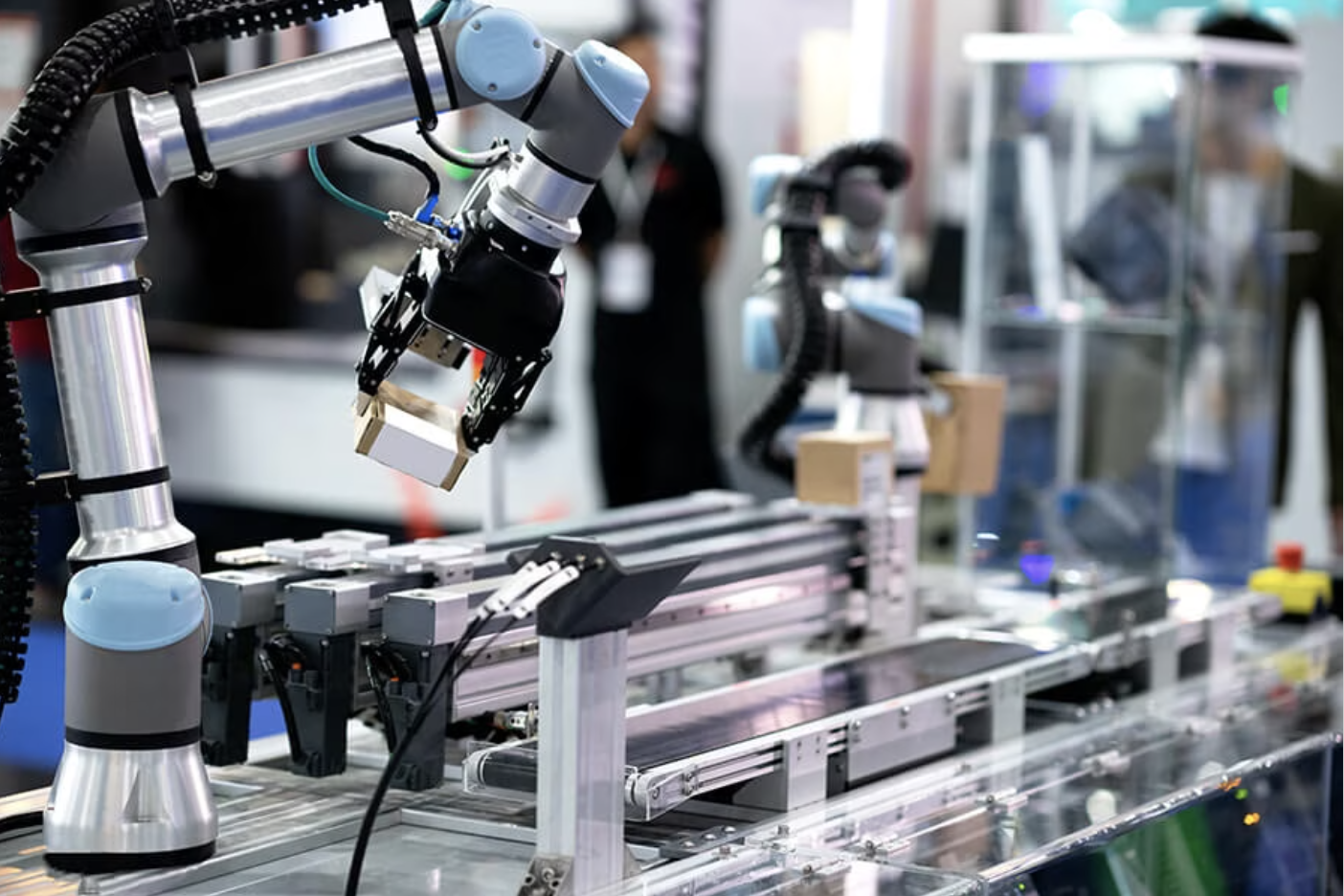
Un effecteur final est le dispositif situé à l'extrémité d'un bras robotique, conçu pour interagir avec l'environnement. Ceci est également connu sous le nom d'outillage de fin de bras (EOAT). Le type d'effecteur final est déterminé par la tâche que le bras robotique est conçu pour accomplir.
Il existe de nombreux effecteurs terminaux différents, notamment des pinces pour déplacer et manipuler des objets, des outils de traitement tels que des soudeuses ou des pulvérisateurs de peinture, et des capteurs pour les inspections de produits.
Le kit de cellule de travail CTE comprend deux effecteurs terminaux.
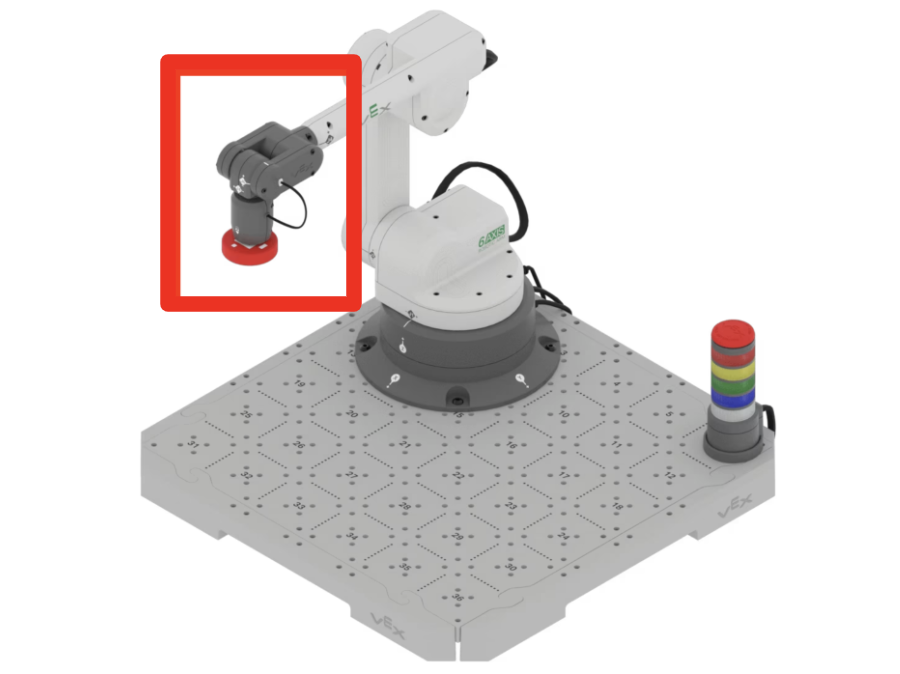
Le premier effecteur final que vous utiliserez avec le bras à 6 axes est l’outil de ramassage magnétique. Ceci est utilisé pour récupérer les disques et les cubes dans le kit de cellule de travail CTE.
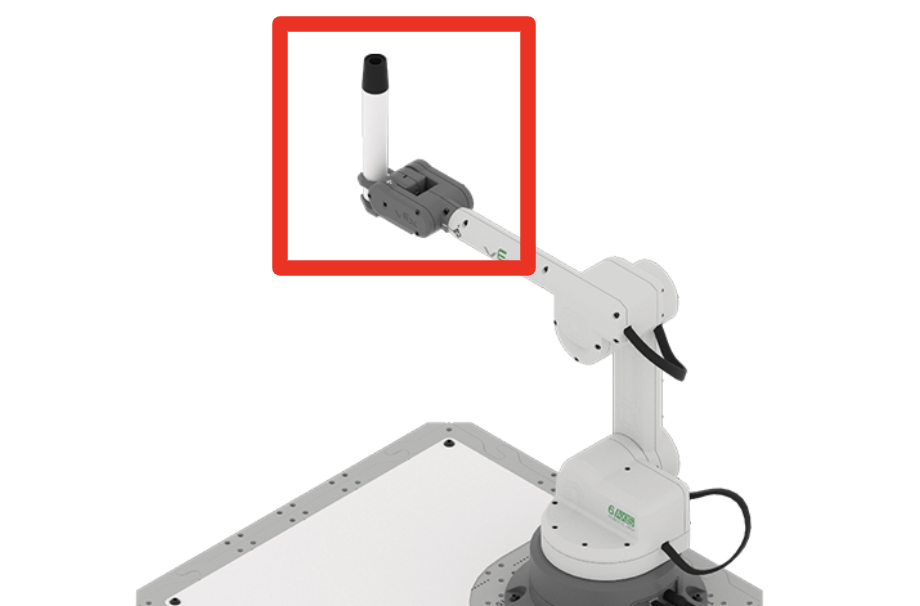
Le deuxième effecteur final que vous utiliserez avec le bras à 6 axes est l'outil porte-stylo. Cela vous permet de placer le marqueur pour tableau blanc dans l'outil pour dessiner sur la tuile.
Vous en apprendrez davantage sur cet effecteur final dans une unité ultérieure.
Ramasser et déposer un disque
Chaque disque possède un noyau métallique qui permet de le saisir et de le déplacer à l'aide de l'aimant situé à l'extrémité du bras à 6 axes. Suivez les étapes de cette section pour utiliser le pendentif d’enseignement pour récupérer et déposer un disque.
Commencez par effectuer la configuration suivante.
- Assurez-vous que le bras à 6 axes est connecté à VEXcode EXP avec le pendentif d'apprentissage ouvert.
- Placez un disque à l'emplacement de tuile 36.
- Déplacez le bras à 6 axes de manière à ce que l'aimant touche le disque, comme indiqué ici.
- N'oubliez pas de sélectionner Déplacer vers la position de sécurité dans le pendentif d'apprentissage pour activer la fonctionnalité de jogging .
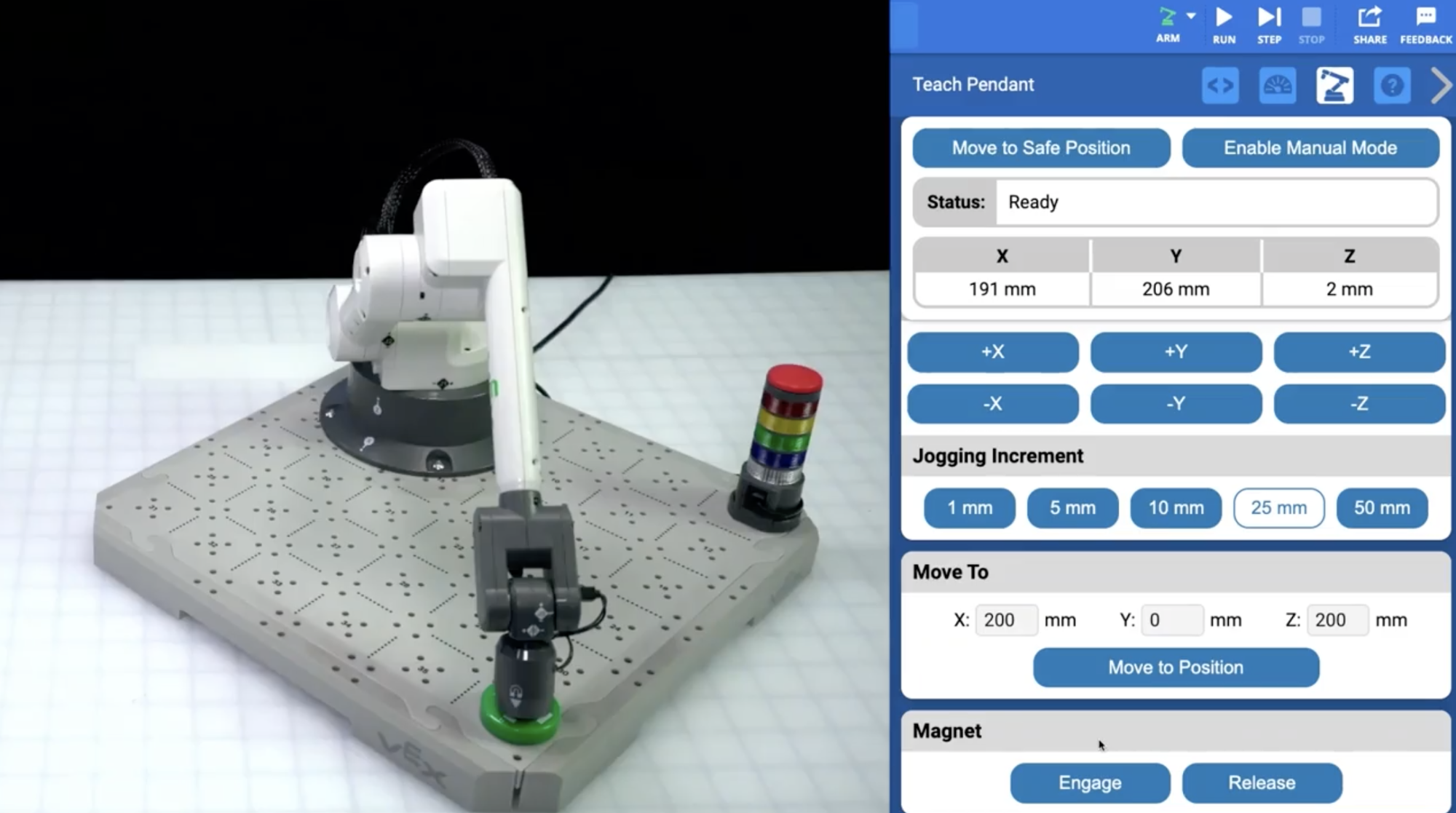
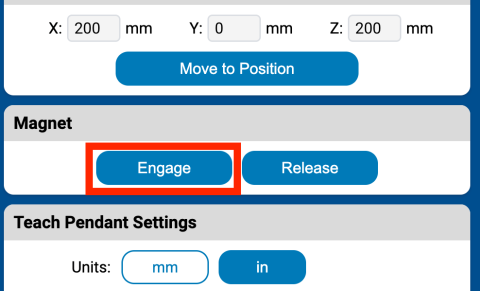
Sélectionnez le bouton Engage dans la section Aimant du pendentif d'enseignement pour récupérer le disque.
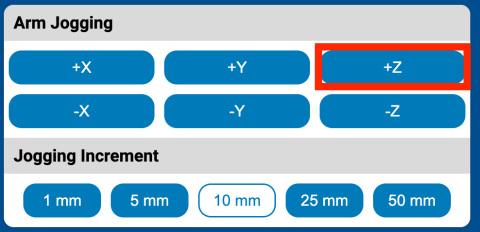
Pour vérifier que le disque a été récupéré par l'aimant, déplacez le bras à 6 axes le long de l'axe z de 20 à 30 millimètres.
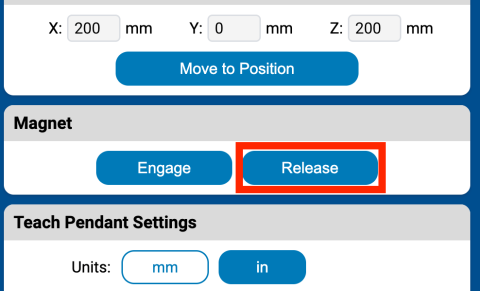
Libérez le disque en sélectionnant le bouton Release .
Regardez cette vidéo pour voir un exemple du bras à 6 axes se déplaçant le long de l'axe Z pour soulever le disque avec l'aimant. Le bras à 6 axes se déplace vers le haut sur l'axe Z chaque fois que le bouton +Z du pendentif d'apprentissage est enfoncé.
Regardez cette vidéo pour voir le bras à 6 axes libérer le disque lorsque le bouton Release est sélectionné.
Activité
Maintenant que vous avez déplacé un disque à l'aide du bras à 6 axes et du pendentif d'enseignement, vous allez vous entraîner à déplacer un disque sur la tuile vers un nouvel emplacement.
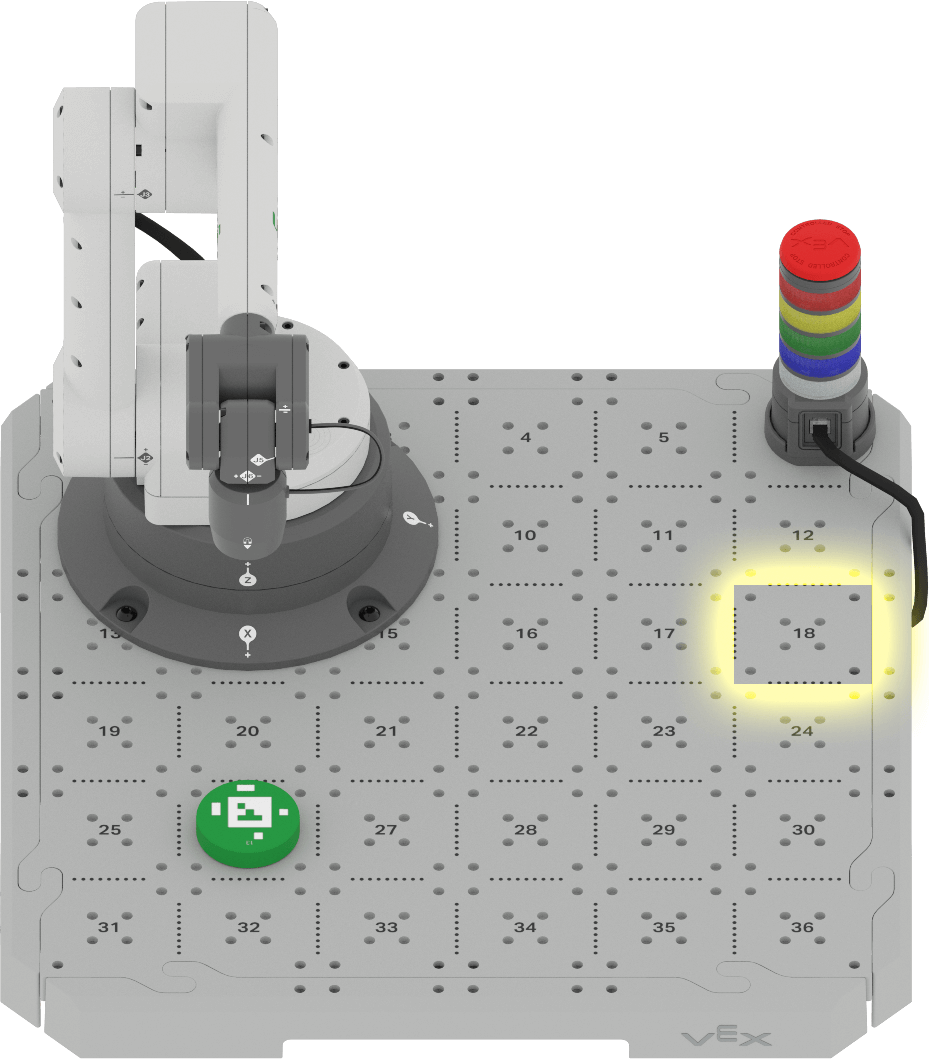
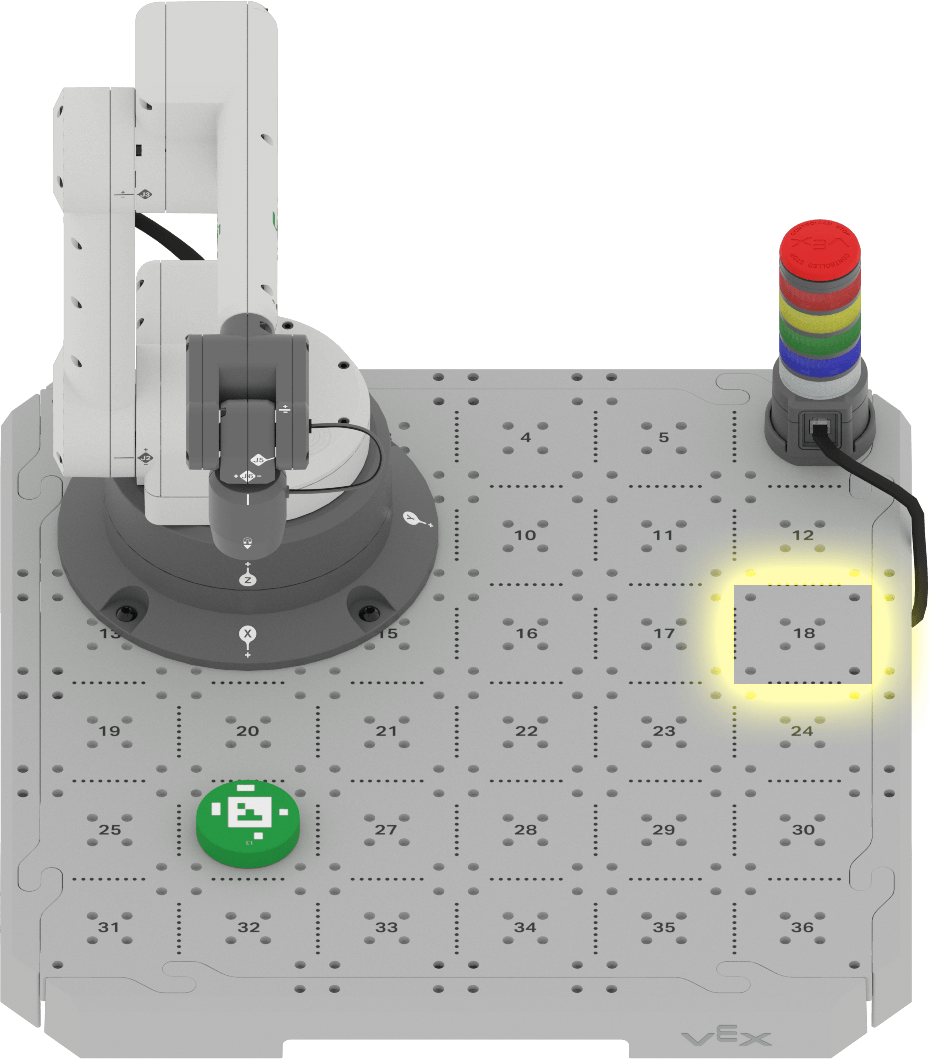
- Configuration: Placez un disque au numéro 26 sur la tuile.
- Utilisez le pendentif d'enseignement pour que le bras à 6 axes déplace le disque du numéro 26 au numéro 18 sur la tuile.
Vérifiez votre compréhension
Avant de passer à la leçon suivante, assurez-vous de bien comprendre les concepts de cette leçon en répondant aux questions du document ci-dessous dans votre cahier d’ingénierie.
Questions pour vérifier votre compréhension > (Google Doc / .docx / .pdf)
Sélectionnez Suivant > pour combiner vos compétences dans l’activité « Mettre tout cela ensemble ».