
บทที่ 2: เอฟเฟกเตอร์ปลาย
ในบทเรียนก่อนหน้านี้ คุณได้เรียนรู้เกี่ยวกับ Teach Pendant ใน VEXcode EXP และวิธีใช้ Teach Pendant เพื่อเคลื่อนแขน 6 แกน
ในบทเรียนนี้ คุณจะได้เรียนรู้เกี่ยวกับเอฟเฟกเตอร์ปลายสุด รวมถึงเครื่องมือ Magnet Pickup และวิธีใช้ Teach Pendant เพื่อเข้าและปล่อยแม่เหล็ก
เมื่อสิ้นสุดบทเรียนนี้ คุณจะใช้ทักษะเหล่านั้นในการทำกิจกรรมเพื่อย้ายดิสก์บนไทล์ CTE ไปยังตำแหน่ง
เอฟเฟกเตอร์ปลาย
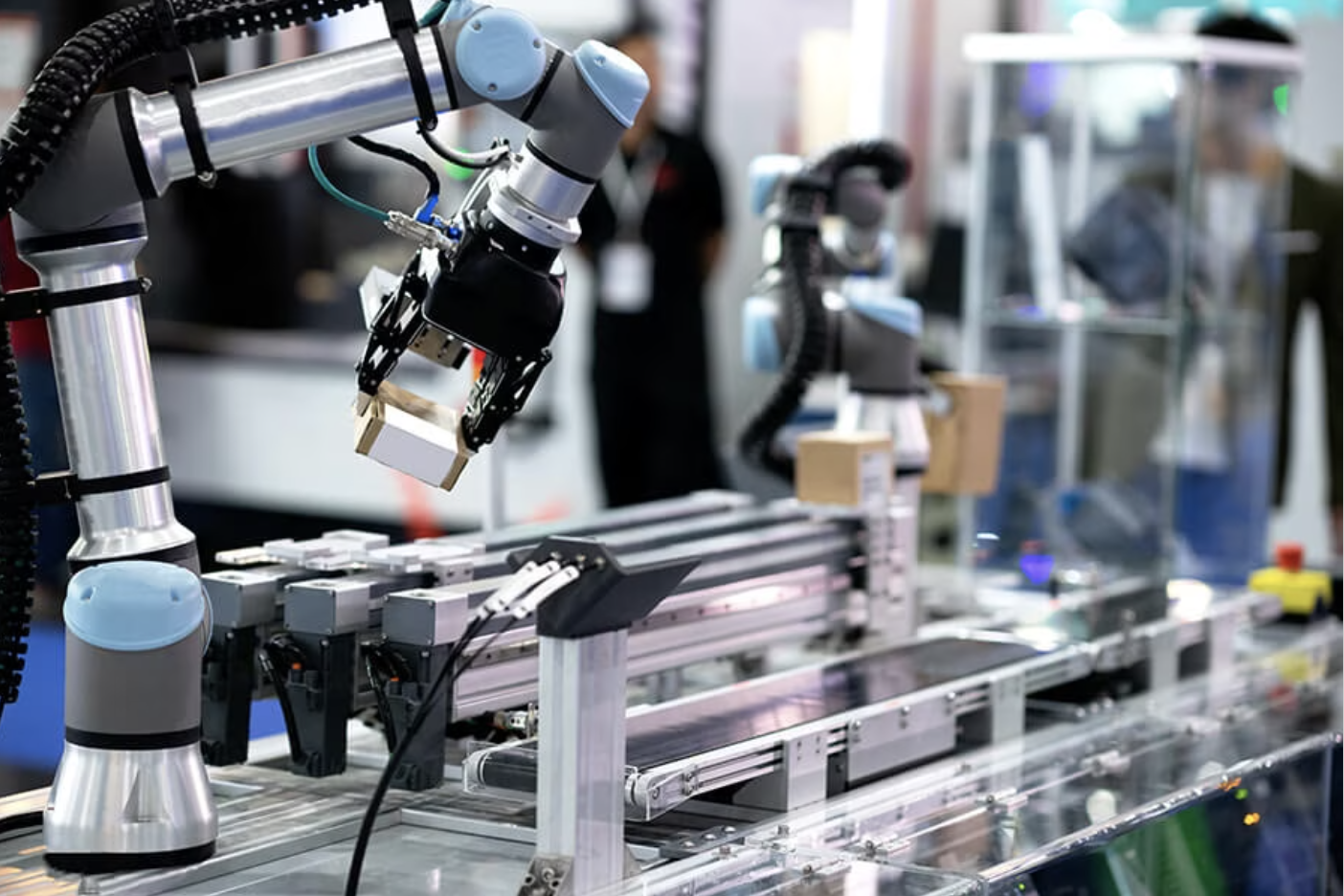
เอฟเฟกเตอร์ปลายแขนหุ่นยนต์คืออุปกรณ์ที่ปลายแขนหุ่นยนต์ ซึ่งออกแบบมาเพื่อโต้ตอบกับสภาพแวดล้อม นี่เป็นที่รู้จักกันในชื่อ End of Arm Tooling (EOAT) ประเภทของเอฟเฟกเตอร์ส่วนปลายจะถูกกำหนดโดยงานที่แขนหุ่นยนต์ได้รับการออกแบบมาให้ทำ
มีเอฟเฟกเตอร์ปลายน้ำหลายประเภท รวมถึงกริปเปอร์เพื่อเคลื่อนย้ายและจัดการวัตถุ เครื่องมือประมวลผล เช่น เครื่องเชื่อมหรือเครื่องพ่นสี และเซ็นเซอร์สำหรับการตรวจสอบผลิตภัณฑ์
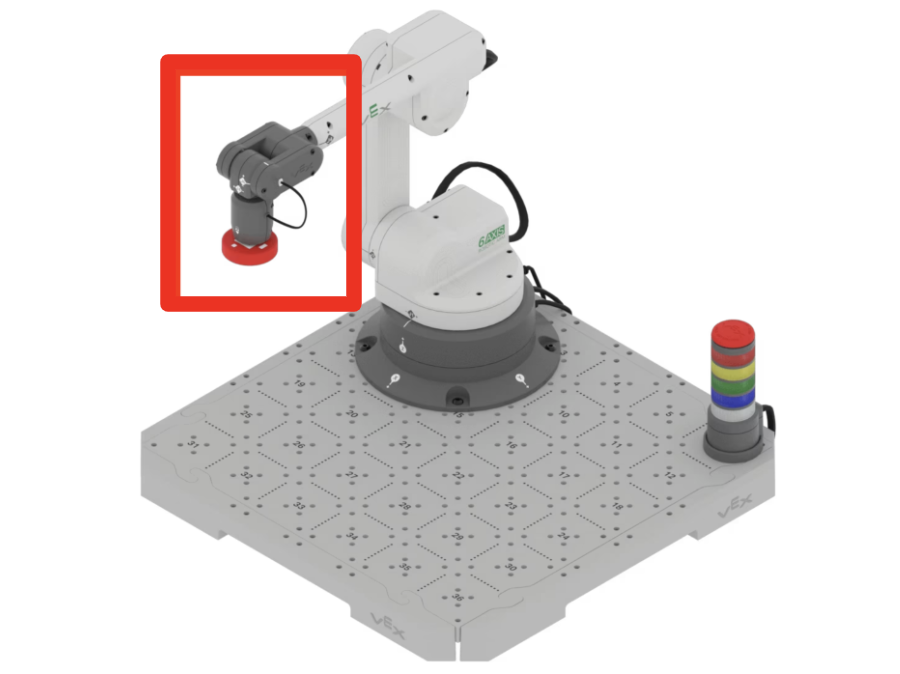
ชุด CTE Workcell ประกอบด้วยเอฟเฟกเตอร์ปลายน้ำสองตัว
เอฟเฟกเตอร์ปลายตัวแรกที่คุณจะใช้กับแขน 6 แกนคือเครื่องมือ Magnet Pickup ใช้เพื่อหยิบดิสก์และลูกบาศก์ในชุด CTE Workcell
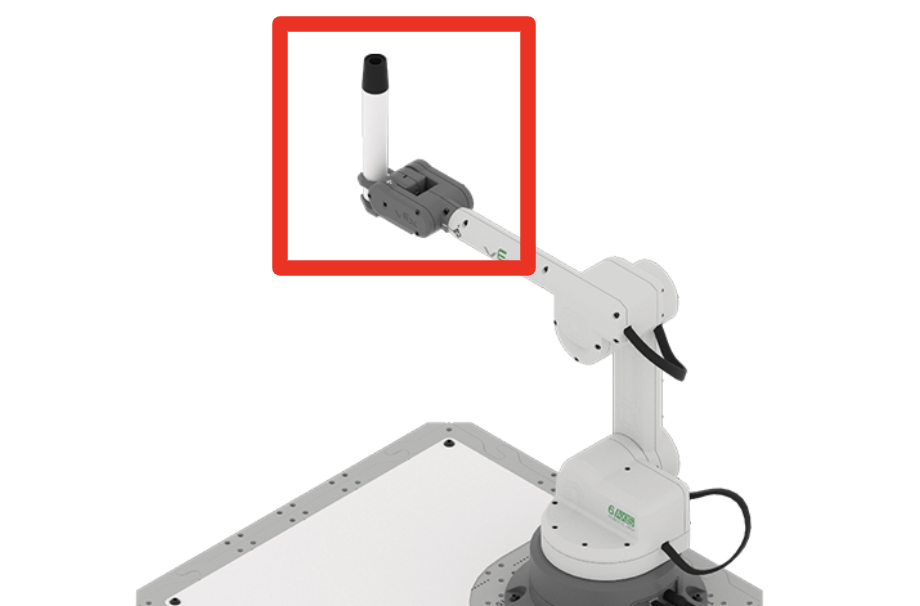
เอฟเฟกเตอร์ส่วนปลายตัวที่สองที่คุณจะใช้กับแขน 6 แกนคือเครื่องมือที่ยึดปากกา สิ่งนี้ช่วยให้คุณวางเครื่องหมายไวท์บอร์ดไว้ในเครื่องมือเพื่อวาดบนไทล์
คุณจะได้เรียนรู้เพิ่มเติมเกี่ยวกับเอฟเฟกเตอร์ปลายสุดนี้ในหน่วยถัดไป
การหยิบและวางดิสก์
แต่ละดิสก์มีแกนโลหะที่ทำให้สามารถหยิบขึ้นมาและเคลื่อนย้ายได้ด้วยแม่เหล็กที่ปลายแขน 6 แกน ทำตามขั้นตอนในส่วนนี้เพื่อใช้ Teach Pendant ในการหยิบและปล่อยดิสก์
เริ่มต้นด้วยการทำตามขั้นตอนการตั้งค่าต่อไปนี้
- ตรวจสอบให้แน่ใจว่าแขน 6 แกนเชื่อมต่อกับ VEXcode EXP โดยมีจี้การสอนเปิดอยู่
- วางดิสก์ที่ตำแหน่งไทล์ 36
- จ็อกแขน 6 แกนเพื่อให้แม่เหล็ก สัมผัสกับดิสก์ ดังที่แสดงที่นี่
- โปรดจำไว้ว่า เลือก ย้ายไปที่ตำแหน่งปลอดภัย ในจี้สอน เพื่อเปิดใช้งานฟังก์ชันการจ็อกกิ้ง
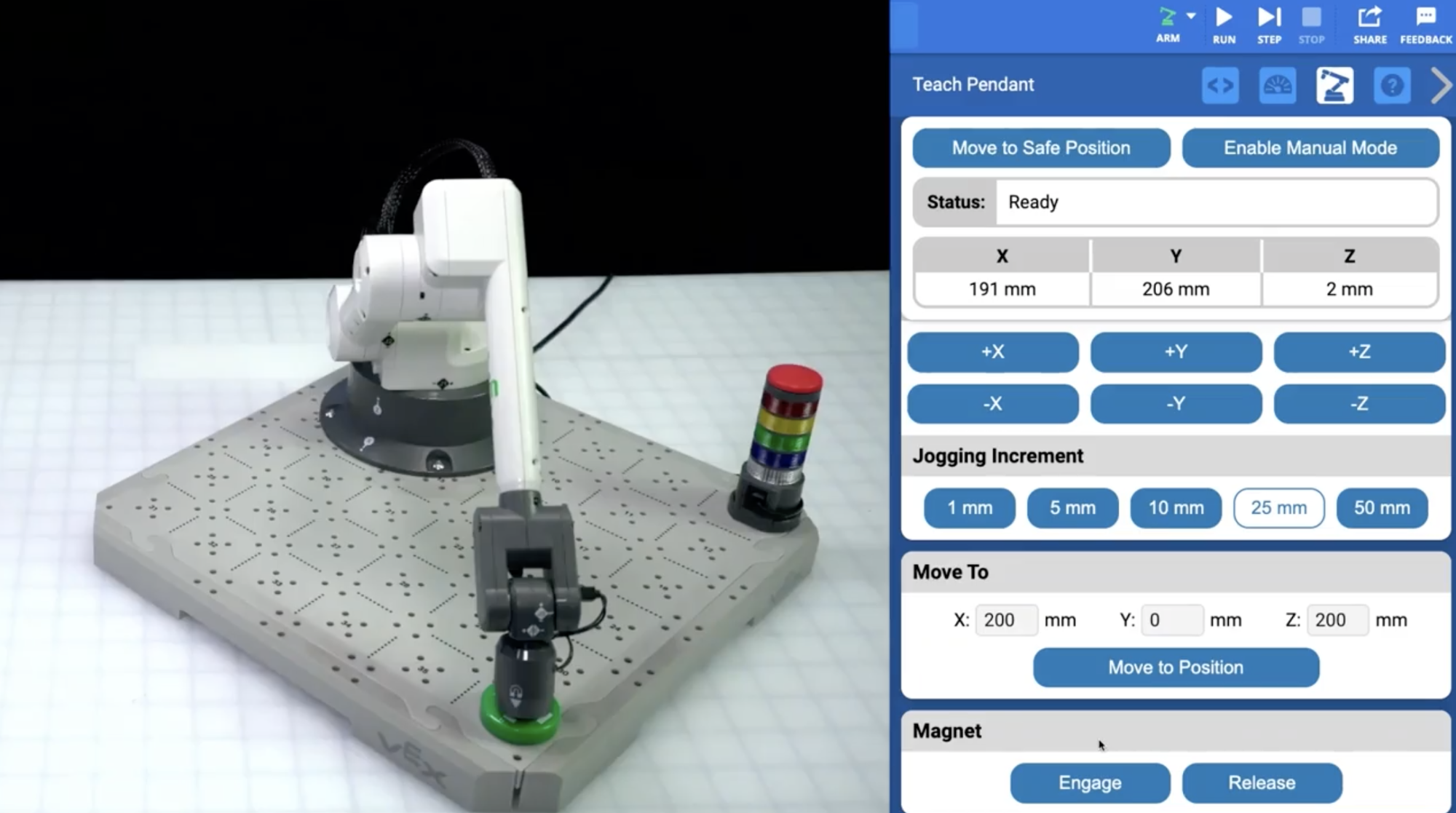
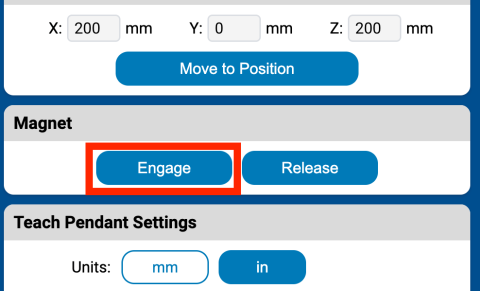
เลือกปุ่ม Engage ในส่วน Magnet ของ Teach Pendant เพื่อหยิบดิสก์
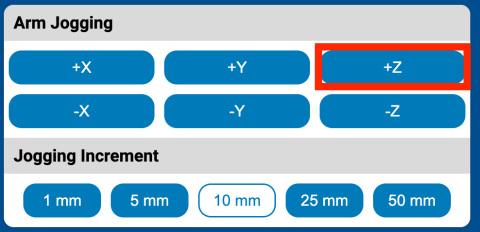
ในการตรวจสอบว่าแม่เหล็กหยิบดิสก์ได้แล้ว ให้เคลื่อนแขน 6 แกนไปตามแกน z ประมาณ 20-30 มิลลิเมตร
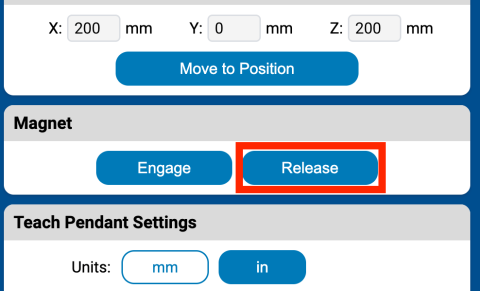
ปล่อยดิสก์โดยเลือกปุ่ม ปล่อย
ดูวิดีโอนี้เพื่อดูตัวอย่างของแขน 6 แกนที่เคลื่อนไปตามแกน z เพื่อยกดิสก์ด้วยแม่เหล็ก แขน 6 แกนจะเคลื่อนขึ้นบนแกน Z ทุกครั้งที่กดปุ่ม +Z ใน Teach Pendant
ดูวิดีโอนี้เพื่อดูการปล่อยดิสก์โดยแขน 6 แกนเมื่อเลือกปุ่ม ปล่อย
กิจกรรม
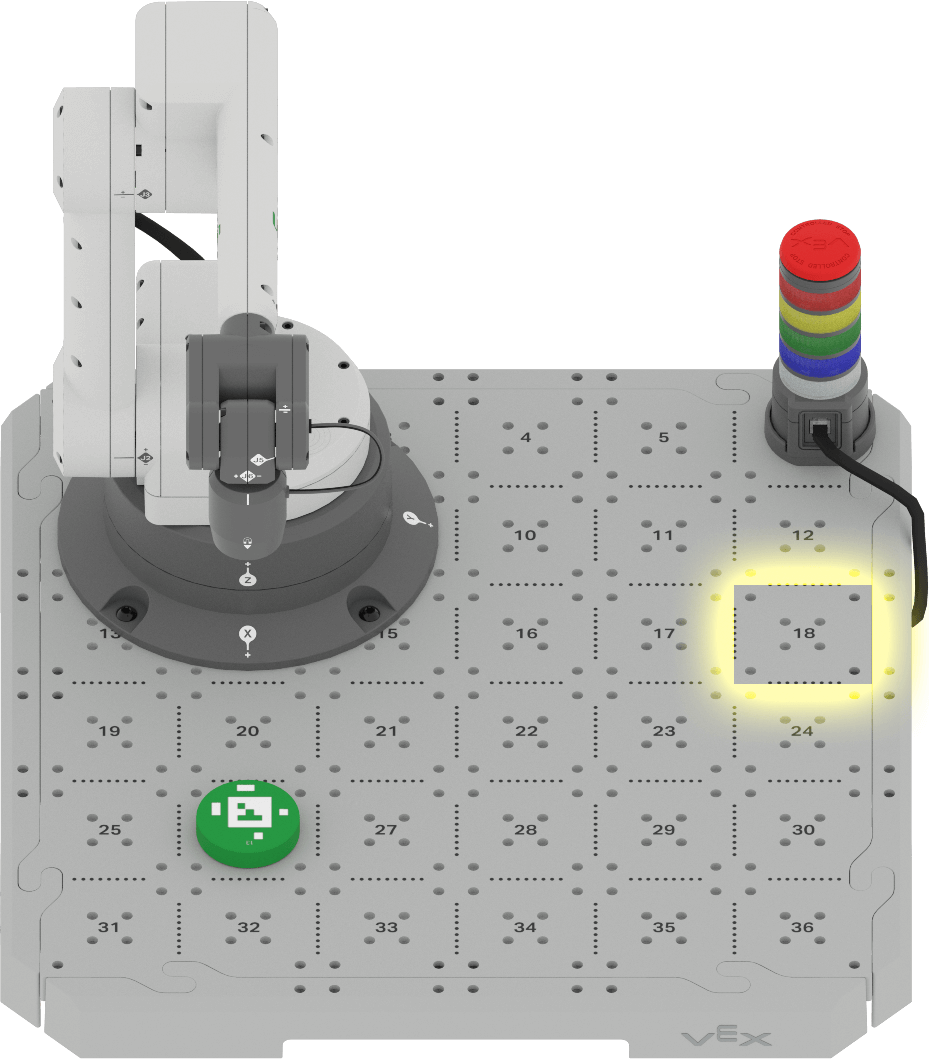
ตอนนี้คุณได้ย้ายดิสก์โดยใช้แขน 6 แกนและจี้สอนแล้ว คุณจะฝึกย้ายดิสก์บนไทล์ไปยังตำแหน่งใหม่
- การตั้งค่า: วางดิสก์ ที่หมายเลข 26 บนไทล์
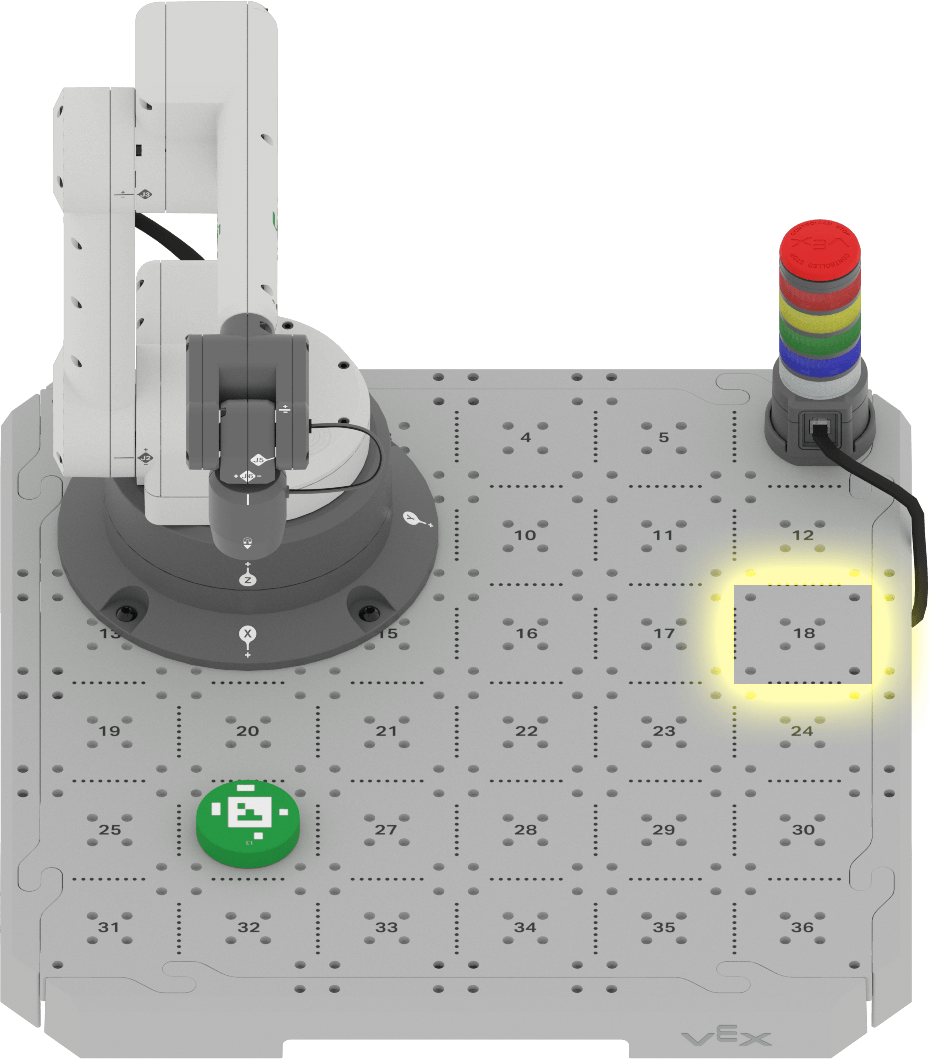
- ใช้ Teach Pendant เพื่อให้แขน 6 แกนย้ายดิสก์ จากหมายเลข 26 ไปยังหมายเลข 18 บนไทล์
ตรวจสอบความเข้าใจของคุณ
ก่อนจะไปยังบทเรียนถัดไป ให้แน่ใจว่าคุณเข้าใจแนวคิดในบทเรียนนี้แล้วโดยการตอบคำถามในเอกสารด้านล่างในสมุดบันทึกวิศวกรรมของคุณ
คำถามตรวจสอบความเข้าใจของคุณ > (Google Doc / .docx / .pdf)
เลือก ถัดไป > เพื่อรวมทักษะของคุณในการทำกิจกรรม Putting It All Together