
Pratique
Dans la dernière section, vous avez appris à utiliser des programmes autonomes et de contrôle du conducteur pour conduire votre robot. Vous avez également appris à télécharger plusieurs projets vers différents emplacements sur le cerveau IQ (2e génération) et comment cela peut être utile. Maintenant, vous allez appliquer ce que vous avez appris pour terminer l'activité pratique sur les compétences de notation.
Le but de cette activité est que vous recueilliez des données pour vous préparer à l'activité de défi de la page suivante. Regardez la vidéo ci-dessous pour voir quels types de données vous allez collecter et comment vous allez les appliquer à vos compétences de conducteur et à vos projets autonomes.
Maintenant, c'est à votre tour de terminer l'activité de pratique des compétences de notation !
Cette animation montre quelques-unes des façons de noter sur lesquelles vous devrez collecter des données pendant l'activité de pratique des compétences de notation. Le concours Cube Collector et le Split Decision Challenge utilisent le même score où tous les cubes doivent être dans la zone de score et l'empilage des cubes compte pour des points supplémentaires.
Suivez les étapes de ce document pour terminer cette activité. Google Doc / .docx / .pdf
Au fur et à mesure que vous terminez l'activité de mise en pratique des compétences de notation, documentez vos conclusions dans votre cahier d'ingénierie.
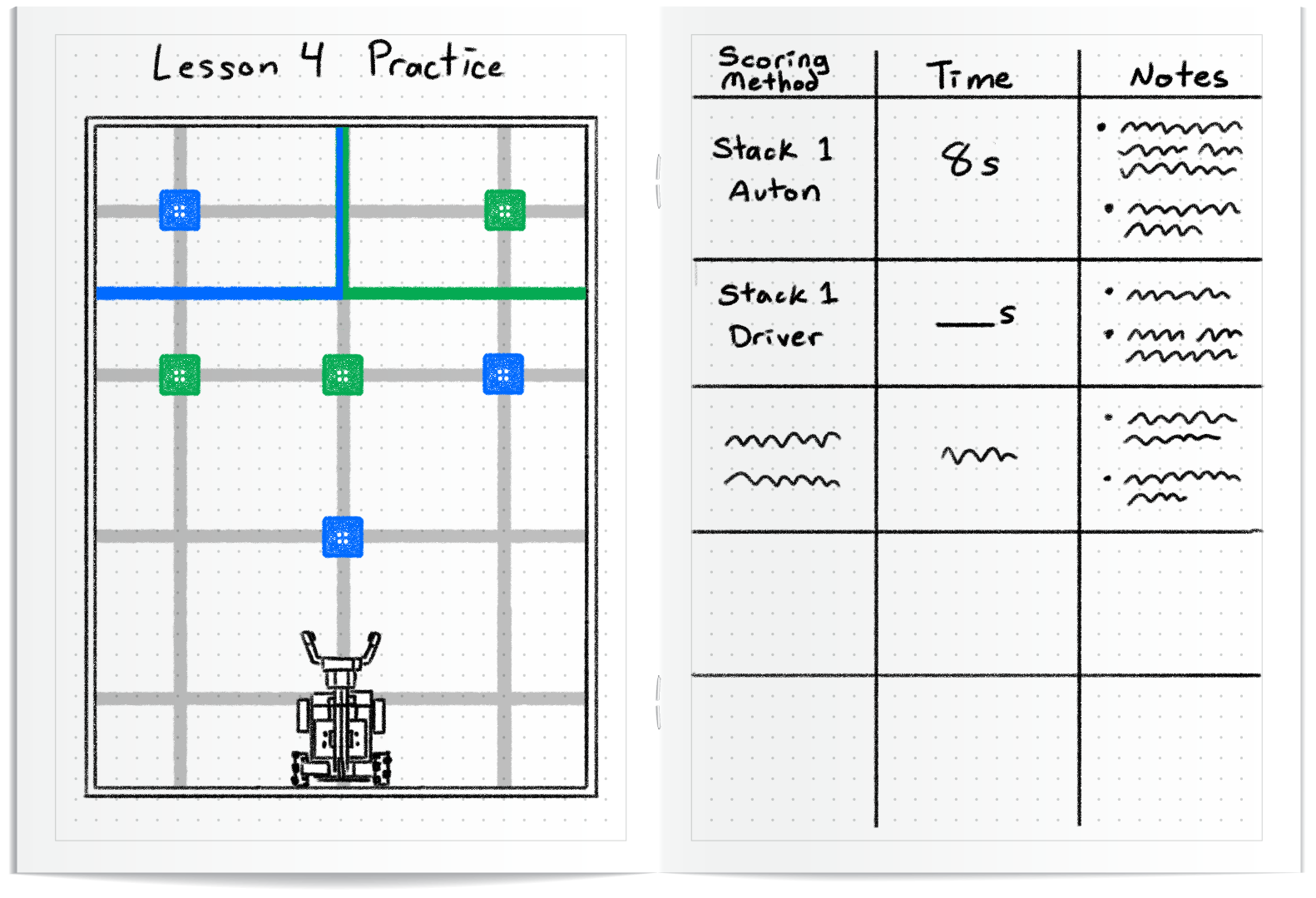
- Esquissez une image pour montrer la configuration du champ et planifier vos projets.
- Énumérez les différentes façons de marquer des points et le temps qu'il vous faut pour terminer chaque action.
- Assurez-vous d'enregistrer chaque méthode de notation à la fois pour le contrôle du conducteur et une course autonome.
Affichez cette image pour un exemple de la façon dont vous pouvez enregistrer vos résultats.
Préparez-vous à relever le défi
Dans Compete (sur la page suivante), vous saisirez, déplacerez et marquerez des cubes dans la zone de score le plus rapidement possible en jouant un match avec deux courses de 30 secondes - une autonome et une utilisant le contrôle du conducteur - dans le Split Decision Challenge. Regardez le document et l'animation ci-dessous pour savoir comment participer au Split Decision Challenge. Ensuite, remplissez les questions Check Your Understanding et entraînez-vous pour le défi.
Le but de ce défi est d'attraper, de déplacer et de marquer des cubes de QI dans leurs zones de notation correspondantes en deux courses - une en utilisant le codage autonome et l'autre en utilisant le contrôle du conducteur. Chaque course dure 30 secondes. Le score le plus élevé, gagne !
Regardez cette animation pour voir un exemple de la façon dont votre robot pourrait se déplacer dans une course réussie du défi.
Ce n'est qu'un exemple de la façon dont un robot pourrait performer dans le Split Decision Challenge.
Suivez les étapes de ce document pour en savoir plus sur la façon de réaliser cette activité. Google Doc / .docx / .pdf
Vérifiez votre compréhension
Avant de commencer le défi, assurez-vous de comprendre les règles et la configuration du défi en répondant aux questions du document ci-dessous dans votre cahier d'ingénierie.
Vérifiez votre compréhension des questions Google Doc / .docx / .pdf
Après avoir répondu aux questions, essayez de relever le défi.
Sélectionnez Suivant > pour participer au Défi de décision partagée.