
ฝึกฝน
ในส่วนที่แล้วคุณได้เรียนรู้เกี่ยวกับการ ใช้โปรแกรมควบคุมอัตโนมัติและไดรเวอร์เพื่อขับเคลื่อนหุ่นยนต์ของคุณ นอกจากนี้คุณยังได้เรียนรู้วิธีดาวน์โหลดโปรเจกต์หลายโปรเจกต์ไปยังสล็อตต่างๆบนสมอง IQ (รุ่นที่ 2) และวิธีนี้จะมีประโยชน์อย่างไร ตอนนี้คุณจะใช้สิ่งที่คุณได้เรียนรู้เพื่อทำกิจกรรมการฝึกทักษะการให้คะแนน
เป้าหมายของกิจกรรมนี้คือเพื่อให้คุณรวบรวมข้อมูลเพื่อเตรียมความพร้อมสำหรับกิจกรรมท้าทายในหน้าถัดไป ดูวิดีโอด้านล่างเพื่อดูว่าคุณจะเก็บรวบรวมข้อมูลประเภทใดและคุณจะนำไปใช้ในทักษะการขับขี่และโปรเจกต์อิสระของคุณอย่างไร
ตอนนี้ถึงตาคุณแล้วที่จะทำกิจกรรมฝึกทักษะการให้คะแนนให้สำเร็จ!
ภาพเคลื่อนไหวนี้แสดงวิธีบางอย่างในการให้คะแนนที่คุณจะต้องเก็บรวบรวมข้อมูลในระหว่างกิจกรรมการฝึกทักษะการให้คะแนน การแข่งขัน Cube Collector และ Split Decision Challenge ใช้การให้คะแนนเดียวกันโดยที่ลูกบาศก์ทั้งหมดต้องอยู่ในโซนการให้คะแนนและการเรียงลูกบาศก์เพื่อนับคะแนนเพิ่มเติม
ทำตามขั้นตอนในเอกสารนี้เพื่อทำกิจกรรมนี้ให้เสร็จ Google Doc /.docx /.pdf
เมื่อคุณทำกิจกรรมฝึกทักษะการให้คะแนนเสร็จแล้วให้บันทึกผลการวิจัยของคุณลงในสมุดบันทึกวิศวกรรมของคุณ
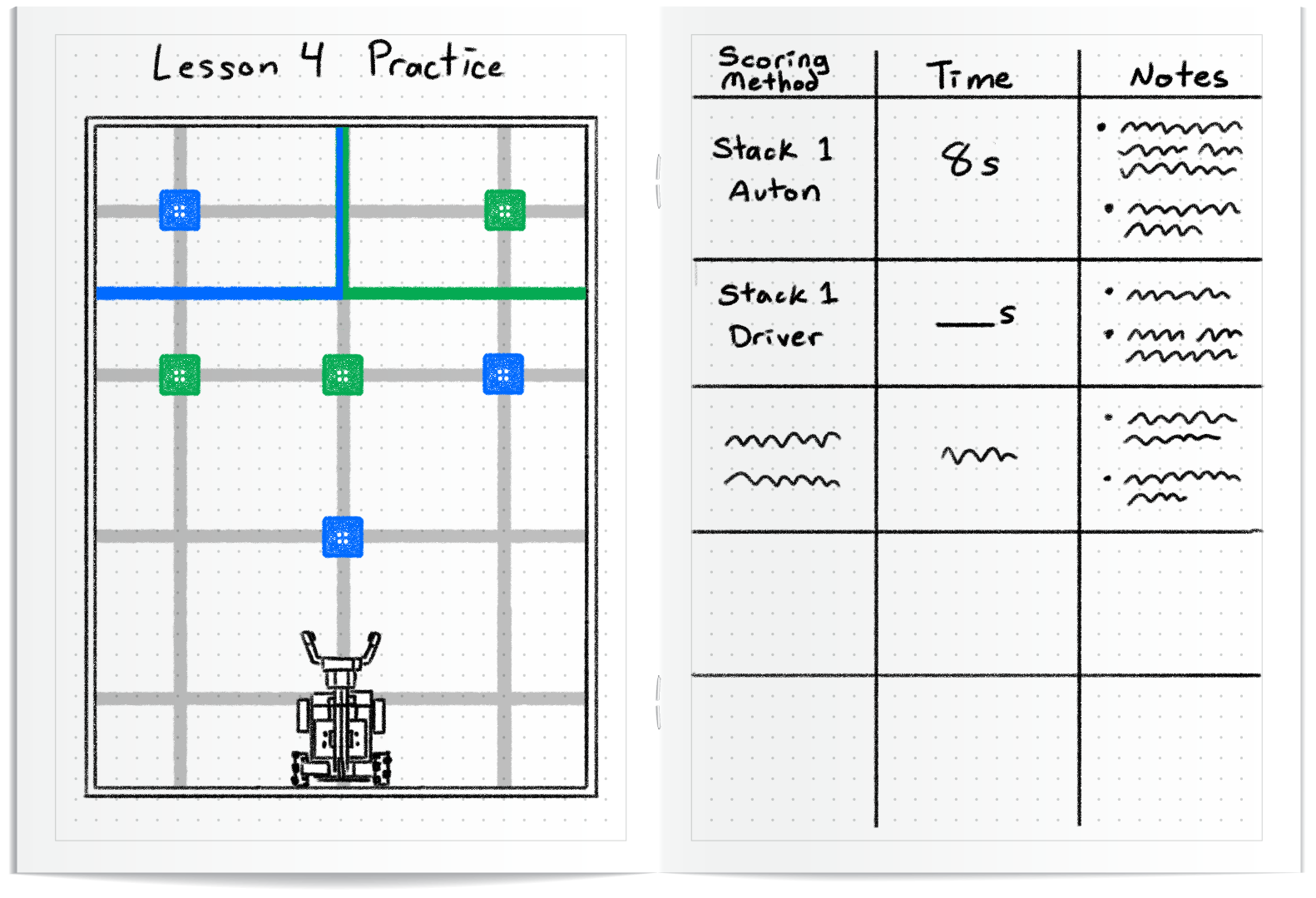
- ร่างภาพเพื่อแสดงการตั้งค่าฟิลด์และวางแผนโปรเจกต์ของคุณ
- ระบุวิธีต่างๆในการทำคะแนนและระยะเวลาที่คุณใช้ในการทำแต่ละการกระทำ
- ตรวจสอบให้แน่ใจว่าคุณบันทึกวิธีการให้คะแนนแต่ละวิธีทั้งสำหรับการควบคุมผู้ขับขี่และการทำงานอัตโนมัติ
ดูภาพนี้เพื่อดูตัวอย่างวิธีบันทึกผลการค้นหา
เตรียมพร้อมสำหรับการท้าทาย
ในการแข่งขัน (ในหน้าถัดไป) คุณจะคว้าย้ายและทำคะแนนลูกบาศก์ในโซนการให้คะแนนโดยเร็วที่สุดเท่าที่จะเป็นไปได้โดยการเล่นการแข่งขันที่มีการวิ่ง 30 วินาทีสองครั้ง - อัตโนมัติหนึ่งครั้งและอีกหนึ่งครั้งโดยใช้การควบคุมคนขับ - ในการท้าทายการตัดสินใจแบบแยกส่วน ดูเอกสารและแอนิเมชั่นด้านล่างเพื่อเรียนรู้วิธีแข่งขันใน Split Decision Challenge จากนั้นทำการตรวจสอบคำถามความเข้าใจของคุณและฝึกฝนสำหรับความท้าทาย
เป้าหมายของความท้าทายนี้คือการคว้าย้ายและทำคะแนน IQ Cubes ในโซนการให้คะแนนที่ตรงกันในสองรอบ - หนึ่งรอบโดยใช้การเข้ารหัสอัตโนมัติและหนึ่งรอบโดยใช้การควบคุมของผู้ขับขี่ การวิ่งแต่ละครั้งมีความยาว 30 วินาที คะแนนสูงสุดชนะ!
ดูภาพเคลื่อนไหวนี้เพื่อดูตัวอย่างว่าหุ่นยนต์ของคุณ สามารถเคลื่อนไหวในการท้าทายที่ประสบความสำเร็จได้อย่างไร
นี่เป็นเพียงตัวอย่างหนึ่งของการทำงานของหุ่นยนต์ในการท้าทายการตัดสินใจแบบแยกส่วน
ทำตามขั้นตอนในเอกสารนี้เพื่อเรียนรู้เพิ่มเติมเกี่ยวกับวิธีทำกิจกรรมนี้ให้เสร็จสมบูรณ์ Google Doc /.docx /.pdf
ตรวจสอบความเข้าใจของคุณ
ก่อนที่จะเริ่มความท้าทายตรวจสอบให้แน่ใจว่าคุณเข้าใจกฎและการตั้งค่าความท้าทายโดยการตอบคำถามในเอกสารด้านล่างในสมุดบันทึกวิศวกรรมของคุณ
ตรวจสอบคำถามเกี่ยวกับความเข้าใจ ของคุณ Google Doc /.docx /.pdf
หลังจากตอบคำถามเสร็จแล้วให้ลองฝึกความท้าทาย
เลือก ถัด > ไปเพื่อแข่งขันใน Split Decision Challenge