
練習する
前のセクションでは、自律プログラムとドライバー制御プログラムを使用してロボットを駆動する について学びました。 また、IQ (第 2 世代) Brain の異なるスロットに複数のプロジェクトをダウンロードする方法と、これがどのように役立つかを学びました。 ここで、学んだことを応用してスコアリング スキルの練習アクティビティを完了します。
このアクティビティの目的は、次のページのチャレンジ アクティビティに備えてデータを収集することです。 どのような種類のデータを収集し、それをドライバーのスキルや自動運転プロジェクトにどのように適用するかを確認するには、以下のビデオをご覧ください。
次は、スコアリング スキルの練習アクティビティを完了する番です。
このアニメーションは、スコアリング スキルの練習アクティビティ中にデータを収集する必要があるスコアリング方法のいくつかを示しています。 キューブ コレクター コンペティションとスプリット ディシジョン チャレンジでは同じスコアリングが使用され、すべてのキューブがスコアリング ゾーン内にある必要があり、キューブを積み重ねると追加ポイントがカウントされます。
このアクティビティを完了するには、この文書の手順に従ってください。 Googleドキュメント / .docx / .pdf
スコアリング スキルの実践アクティビティを完了したら、結果をエンジニアリング ノートに文書化します。
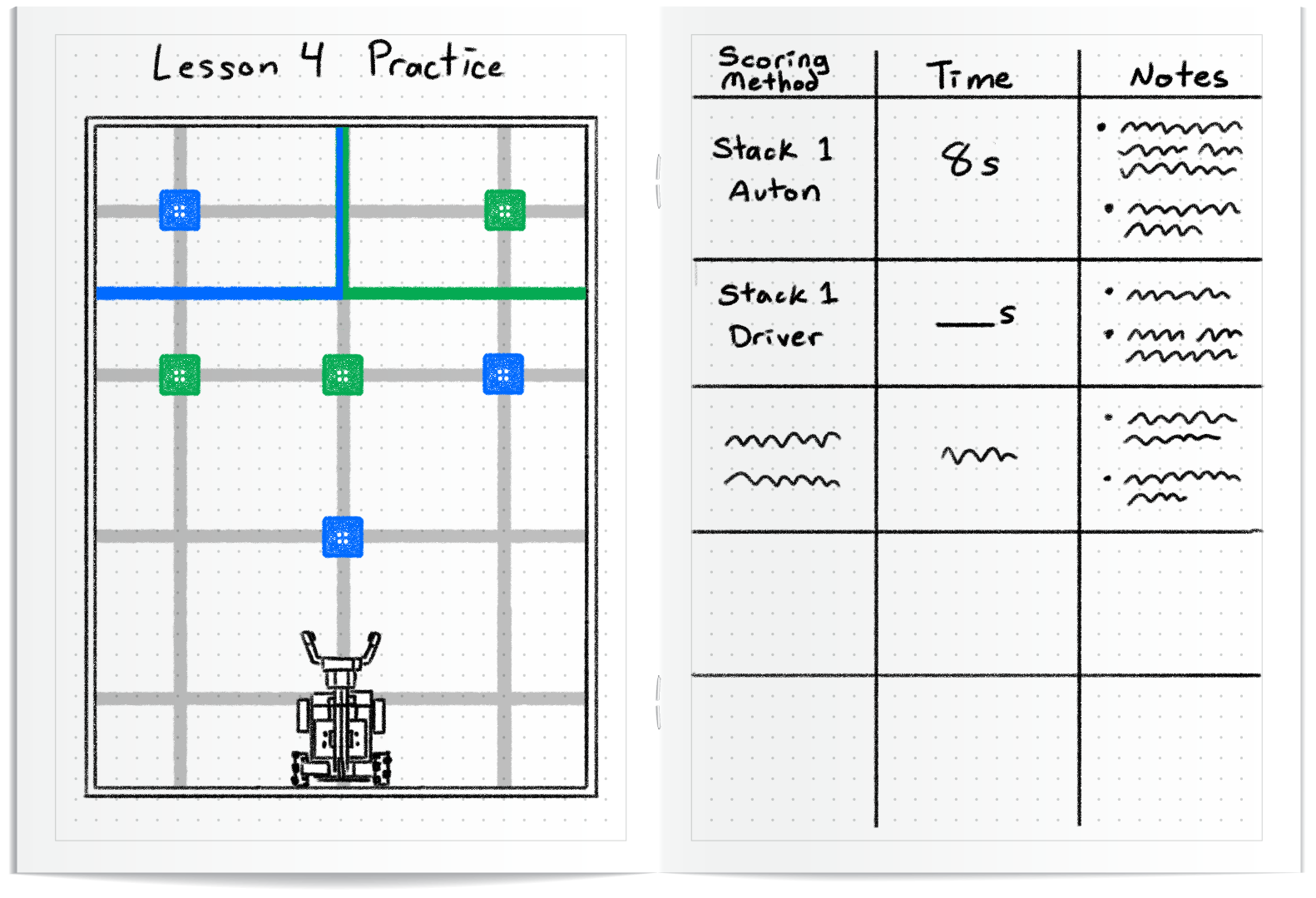
- フィールドのセットアップを示す写真をスケッチし、プロジェクトを計画します。
- ポイントを獲得するさまざまな方法と、各アクションを完了するのにかかる時間を列挙します。
- ドライバー制御と自律走行の両方について、各スコアリング方法を必ず記録してください。
結果を記録する方法の例については、この画像を参照してください。
チャレンジの準備をする
「競争」 (次のページ) では、30 秒間の 2 つのラン (1 つは自律走行、もう 1 つはドライバー制御を使用) で試合をプレイすることにより、得点ゾーンでできるだけ早くキューブを掴み、移動し、得点します。スプリット デシジョン チャレンジでは 。 スプリット デシジョン チャレンジに参加する方法については、以下のドキュメントとアニメーションをご覧ください。 次に、理解度チェックの質問を完了し、課題に向けて練習します。
このチャレンジの目標は、2 回の実行 (自律コーディングを使用した実行とドライバー制御を使用した実行) で、一致するスコアリング ゾーンで IQ キューブをつかみ、移動し、スコアを獲得することです。 各実行の長さは 30 秒です。 最も高いスコアが勝ちです!
このアニメーションを見て、ロボット がチャレンジを成功裏に実行する方法の例を確認してください。
これは、ロボットがスプリット デシジョン チャレンジでどのようにパフォーマンスを発揮できるかを示す一例にすぎません。
このアクティビティを完了する方法の詳細については、このドキュメントの手順に従ってください。 Google ドキュメント / .docx / .pdf
理解を確認してください
チャレンジを開始する前に、エンジニアリング ノートブック内の以下の文書の質問に答えて、チャレンジのルールと設定を理解していることを確認してください。
理解度を確認するための質問 Google ドキュメント / .docx / .pdf
問題を完了したら、課題を練習してみてください。
スプリット ディシジョン チャレンジに参加するには、 次 > を選択します。