
परिचय
पिछली इकाई में, आपने 6-एक्सिस रोबोटिक आर्म के साथ मैनुअल मूवमेंट के बारे में सीखा और VEXcode EXP में टीच पेंडेंट के साथ CTE टाइल स्थानों के निर्देशांक पाए।
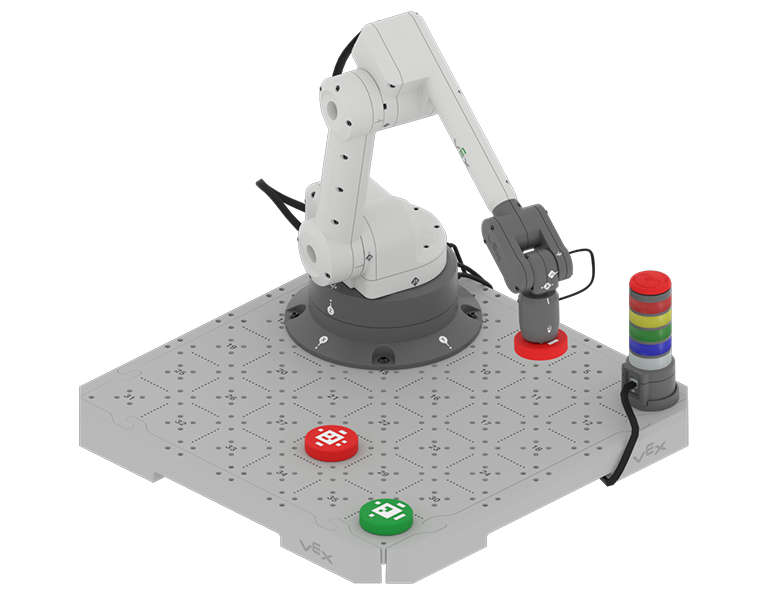
इस इकाई में, आप टीच पेंडेंट के बारे में और अधिक जानेंगे तथा मैग्नेट पिकअप टूल का उपयोग करना सीखेंगे, ताकि आप टाइल पर डिस्क को उठा सकें और स्थानांतरित कर सकें।
इस इकाई में आप क्या सीखेंगे, इसके अवलोकन के लिए निम्नलिखित परिचय वीडियो देखें।
सीखने के लक्ष्यों का सह-निर्माण
अब जब आपने वीडियो देख लिया है, तो आप जानते हैं कि आप मैग्नेट पिकअप टूल के साथ डिस्क को उठाने और स्थानांतरित करने के लिए 6-एक्सिस आर्म को स्थानांतरित करने के लिए टीच पेंडेंट का उपयोग करेंगे। सबसे पहले आप सीखेंगे कि टीच पेंडेंट क्या हैं और उद्योग में उनका उपयोग कैसे किया जाता है, साथ ही VEXcode में टीच पेंडेंट की सुविधाओं का उपयोग कैसे किया जाता है। आप अंत प्रभावकों, जैसे कि चुंबक, के बारे में भी जानेंगे तथा यह भी जानेंगे कि इसका उपयोग डिस्क को उठाने और स्थानांतरित करने के लिए कैसे किया जा सकता है। फिर आप टाइल पर तीन डिस्क को नए स्थानों पर ले जाने के लिए टीच पेंडेंट का उपयोग करने के लिए यह सब एक साथ रखेंगे। सोचें कि उन कार्यों को पूरा करने के लिए आपको क्या जानना और सीखना होगा।
आप अपने समूह और अपने शिक्षक के साथ मिलकर इन लक्ष्यों को प्राप्त करने के लिए शिक्षण लक्ष्य तैयार करेंगे, ताकि आपको इकाई के लिए अपने शिक्षण लक्ष्यों की साझा समझ हो। आप अपने सीखने के लक्ष्यों को अपनी इंजीनियरिंग नोटबुक में लिखेंगे ताकि आप पूरे यूनिट में उनका संदर्भ ले सकें।
सीखने के लक्ष्यों को "मैं कर सकता हूँ" कथनों के रूप में व्यक्त करना सहायक होता है। इस इकाई के लिए उदाहरणात्मक शिक्षण लक्ष्य निम्नलिखित हो सकते हैं:
- मैं यह पहचान सकता हूं कि टीच पेंडेंट के साथ चुंबक को कैसे सक्षम और जारी किया जाए।
- मैं 6-अक्ष भुजा को x, y, और z-अक्षों के साथ चलाने के लिए टीच पेंडेंट का उपयोग कर सकता हूँ।
- मैं 6-एक्सिस आर्म के माध्यम से डिस्क को एक स्थान से दूसरे स्थान पर ले जाने के लिए टीच पेंडेंट का उपयोग कर सकता हूं।
अपने सीखने के लक्ष्य निर्धारित करने के लिए, सबसे पहले इस बात पर विचार करें कि ऊपर दिए गए वीडियो में दिखाई गई गतिविधियों को पूरा करने के लिए आपको क्या जानना होगा। अपनी इंजीनियरिंग नोटबुक में इस तरह से एक सूची बनाएँ कि आपको क्या जानना, सीखना और करना होगा:
- 6-अक्ष भुजा की गति रोकें।
- 6-अक्ष भुजा को x-अक्ष के साथ घुमाएं।
- 6-अक्ष भुजा पर चुंबक को सक्षम करें।
- मेरी इंजीनियरिंग नोटबुक में टीच पेंडेंट की विशेषताओं को दर्ज करें।
- गतिविधि को सहयोगात्मक रूप से पूरा करने के लिए अपने समूह के साथ मिलकर काम करें।
इसके बाद, अपनी सूची के आधार पर सीखने के लक्ष्य बनाएं। इस बारे में सोचें कि आपके द्वारा सूचीबद्ध प्रत्येक चीज़ को "मैं कर सकता हूँ" कथनों का उपयोग करके सीखने के लक्ष्य में कैसे ढाला जा सकता है। आप अपने इंजीनियरिंग नोटबुक में अपने सीखने के लक्ष्यों को लिखने में सहायता के लिए इस टेम्पलेट का उपयोग कर सकते हैं। (गूगल डॉक / .docx / .pdf)
उदाहरण के लिए, सूची आइटम "x-अक्ष के साथ 6-अक्ष भुजा को जॉग करें" के सीखने के लक्ष्य में स्थानांतरित किया जा सकता है। मैं x, y, और z-अक्षों के साथ 6-अक्ष भुजा को जॉग करने के लिए टीच पेंडेंट का उपयोग कर सकता हूं।
निम्नलिखित तालिका एक उदाहरण दिखाती है कि आपकी इंजीनियरिंग नोटबुक में लर्निंग टारगेट ऑर्गनाइज़र को कैसे भरा जा सकता है।
| सीखने का लक्ष्य श्रेणी | सीखने के लक्ष्य |
|---|---|
|
ज्ञान लक्ष्य यूनिट में सफल होने के लिए मुझे क्या जानना और समझना होगा? |
|
|
तर्क लक्ष्य यूनिट में सफल होने के लिए मैं जो जानता और समझता हूं उसका उपयोग मैं क्या कर सकता हूं? |
|
|
कौशल लक्ष्य मैं क्या प्रदर्शित कर सकता हूँ जिससे यह पता चले कि मैं इस इकाई में सफल होने के लिए आवश्यक अवधारणाओं और कौशलों को समझता हूँ? |
|
अपने सीखने के लक्ष्यों को अपने शिक्षक के साथ साझा करें। आवश्यकतानुसार उन्हें समायोजित करें ताकि आप, आपका समूह और आपके शिक्षक सभी सहमत हों।
शब्दावली
इस इकाई में, आप टीच पेंडेंट और एंड इफेक्टर्स के बारे में जानेंगे, ताकि आप 6-एक्सिस आर्म के साथ डिस्क को स्थानांतरित करने के लिए VEXcode EXP में टीच पेंडेंट का उपयोग कर सकें। यह शब्दावली सूची आपके सामने आने वाले किसी भी नए शब्द के लिए संदर्भ प्रदान करने के लिए है। इस शब्दावली को अपनी इंजीनियरिंग नोटबुक में लिख लें। इस सूची का संदर्भ के रूप में उपयोग करें जब आप इकाई पर काम करें और ऐसे शब्दों का सामना करें जिनसे आप परिचित नहीं हों।
- अंतिम प्रभावक
- रोबोटिक भुजा के अंत में स्थित उपकरण को पर्यावरण के साथ अंतःक्रिया करने के लिए डिज़ाइन किया गया है; इसे एंड ऑफ आर्म टूलिंग (ईओएटी) के नाम से भी जाना जाता है।
- धीमी दौड़
- एक नियंत्रण इंटरफ़ेस (जैसे टीच पेंडेंट) का उपयोग करके एक रोबोटिक भुजा को विशिष्ट दिशाओं में क्रमिक रूप से चलाने की प्रक्रिया, आमतौर पर छोटे, सटीक आंदोलनों में।
- रोबोट नियंत्रक यंत्र
- एक उपकरण जिसका उपयोग रोबोटिक भुजा की क्रियाओं को मैन्युअल रूप से नियंत्रित करने के लिए किया जाता है।
| मात्रा | आवश्यक सामग्री |
|---|---|
| प्रति समूह 1 |
सीटीई वर्कसेल किट |
| प्रति समूह 3 |
डिस्क |
| प्रति समूह 1 |
कंप्यूटर |
| प्रति समूह 1 |
VEXकोड EXP |
| प्रति छात्र 1 |
इंजीनियरिंग नोटबुक |
टीच पेंडेंट के बारे में जानने के लिएअगला > चुनें।